16. General purpose timer (TIM2)
In this section, “TIMx” should be understood as “TIM2” since there is only one instance of this timer in the STM32WB05xZ device.
16.1 TIM2 introduction
The general purpose timers (TIM2) consist of a 16-bit auto-reload counter driven by a programmable prescaler. It may be used for a variety of purposes, including measuring the pulse lengths of input signals (input capture) or generating output waveforms (output compare, PWM, complementary PWM with deadtime insertion).
Pulse lengths and waveform periods can be modulated from a few microseconds to several milliseconds using the timer prescaler on the timer input clock which is at 32 MHz.
16.2 TIM2 main features
TIM2 timer features include:
- • 16-bit up, down, up/down auto-reload counter
- • 16-bit programmable prescaler allowing dividing (also “on-the-fly”) the counter clock frequency either by any factor between 1 and 65536
- • Up to 4 independent channels for:
- – Input capture
- – Output compare
- – PWM generation (edge and center-aligned mode)
- – One-pulse mode output
- • Repetition counter to update the timer registers only after a given number of cycles of the counter
- • Interrupt/DMA generation on the following events:
- – Update: counter overflow/underflow, counter initialization (by software or internal/external trigger)
- – Trigger event (counter start, stop, initialization or count by internal/external trigger)(only interrupt)
- – Input capture
- – Output compare
- • Supports incremental (quadrature) encoder for positioning purposes
- • Trigger input for external clock or cycle-by-cycle current management.
Figure 27. Advanced-control timer block diagram
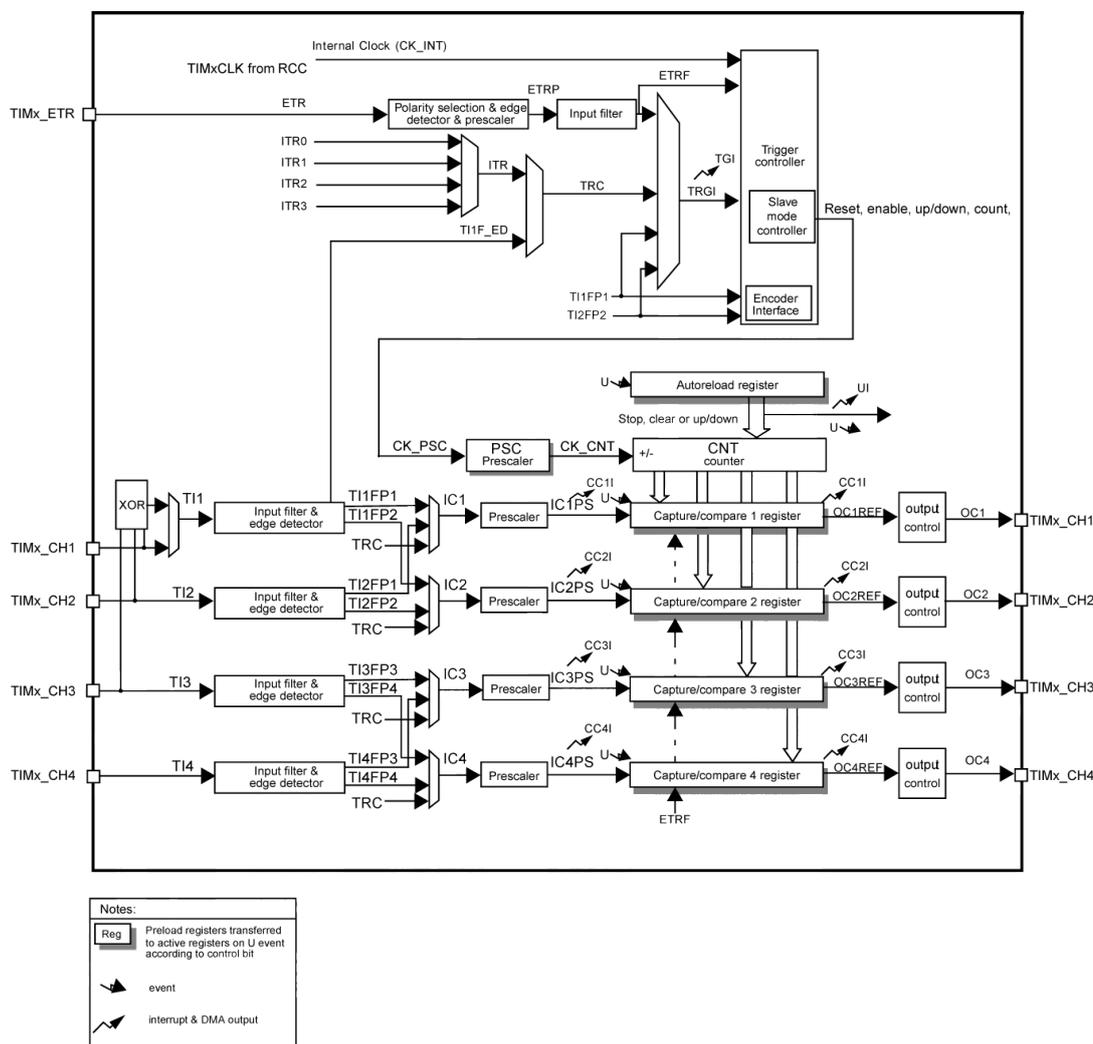
The diagram illustrates the internal architecture of an advanced-control timer. At the top, the 'Internal Clock (CK_INT)' and 'TIMxCLK from RCC' are shown. The 'ETR' input is processed through a 'Polarity selection & edge detector & prescaler' to generate 'ETRP', which is then filtered by an 'Input filter' to produce 'ETRF'. This 'ETRF' signal is fed into the 'Trigger controller'. The 'Trigger controller' also receives inputs from 'ITR0', 'ITR1', 'ITR2', and 'ITR3' (via an 'XOR' gate) and 'TI1F_ED'. It generates 'TRGI' and 'TRGP' signals. The 'Slave mode controller' receives 'Reset, enable, up/down, count' signals and is connected to the 'Trigger controller'. The 'CNT counter' is a 16-bit counter that receives 'CK_CNT' from the 'PSC Prescaler' and 'Stop, clear or up/down' signals from the 'Slave mode controller'. The 'CNT counter' is connected to the 'Autoreload register' (ARR) and four 'Capture/compare registers' (CC1, CC2, CC3, CC4). The 'ARR' has 'U' (update) and 'UI' (update interrupt) signals. The 'Capture/compare registers' are connected to 'TIMx_CH1' through 'TIMx_CH4' outputs via 'output control' blocks. Each channel has an 'Input filter & edge detector' and a 'Prescaler'. The 'TI1' input is connected to 'TIMx_CH1' and 'TIMx_CH2' via an 'XOR' gate. The 'TI2' input is connected to 'TIMx_CH1' and 'TIMx_CH3' via an 'XOR' gate. The 'TI3' input is connected to 'TIMx_CH2' and 'TIMx_CH4' via an 'XOR' gate. The 'TI4' input is connected to 'TIMx_CH3' and 'TIMx_CH4' via an 'XOR' gate. The 'TI1FP1', 'TI1FP2', 'TI2FP1', 'TI2FP2', 'TI3FP3', 'TI3FP4', 'TI4FP3', and 'TI4FP4' signals are generated by the 'Input filter & edge detector' blocks. The 'TRC' signals are generated by the 'Prescaler' blocks. The 'IC1', 'IC2', 'IC3', and 'IC4' signals are generated by the 'Prescaler' blocks. The 'CC1', 'CC2', 'CC3', and 'CC4' signals are generated by the 'Capture/compare registers'. The 'OC1', 'OC2', 'OC3', and 'OC4' signals are generated by the 'output control' blocks. The 'ETRF' signal is also fed into the 'Capture/compare 4 register'.
Notes:
Preload registers transferred to active registers on U event according to control bit
event
interrupt & DMA output
16.3 TIM2 functional description
16.3.1 Time-base unit
The main block of the programmable general purpose timer is a 16-bit counter with its related auto-reload register. The counter can count up, down or both up and down. The counter clock can be divided by a prescaler.
The counter, the auto-reload register and the prescaler register can be written or read by software. This is true even when the counter is running.
The time-base unit includes:
- • Counter register(TIMx_CNT)
- • Prescaler register(TIMx_PSC)
- • Auto-reload register(TIMx_ARR)
- • Repetition counter register(TIMx_RCR)
The auto-reload register is preloaded. Writing to or reading from the auto-reload register accesses the preload register. The contents of the preload register are transferred into the shadow register permanently or at each update event (UEV), depending on the auto-reload preload enable bit (ARPE) in TIMx_CR1 register. The update event is sent when the counter reaches the overflow (or underflow when down-counting) and if the UDIS bit equals 0 in the TIMx_CR1 register. It can also be generated by software. The generation of the update event is described in detail for each configuration.
The counter is clocked by the prescaler output CK_CNT, which is enabled only when the counter enable bit (CEN) in TIMx_CR1 register is set (refer also to the slave mode controller description to get more details on counter enabling).
Note that the counter starts counting 1 clock cycle after setting the CEN bit in the TIMx_CR1 register.
Prescaler description
The prescaler can divide the counter clock frequency by any factor between 1 and 65536. It is based on a 16-bit counter controlled through a 16-bit register (in the TIMx_PSC register). It can be changed on-the-fly as this control register is buffered. The new prescaler ratio is taken into account at the next update event.
Figure 28. Counter timing diagram with prescaler division change from 1 to 2 and Figure 29. Counter timing diagram with prescaler division change from 1 to 4 give some examples of the counter behavior when the prescaler ratio is changed on-the-fly
Figure 28. Counter timing diagram with prescaler division change from 1 to 2
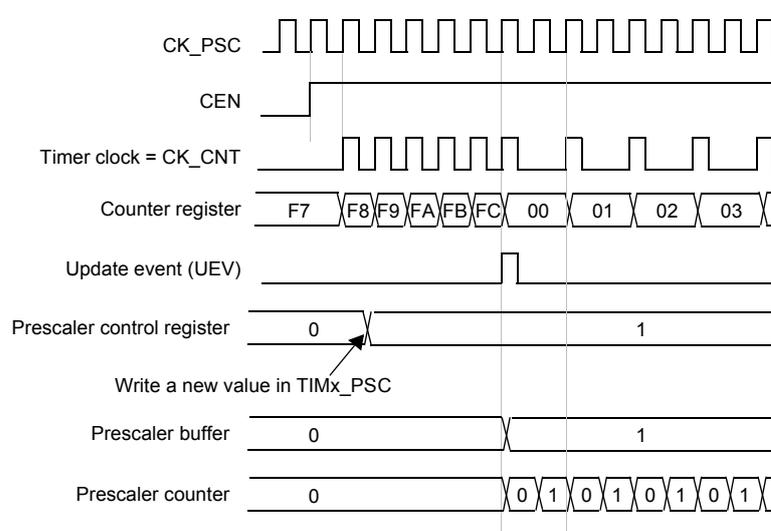
The diagram illustrates the timing of a timer when the prescaler division is changed from 1 to 2. The top signal, CK_PSC, is a periodic clock. The CEN signal is set high to enable the counter. The Timer clock (CK_CNT) is derived from CK_PSC. The Counter register shows values F7, F8, F9, FA, FB, FC, 00, 01, 02, 03. An Update event (UEV) occurs when the counter reaches 00. The Prescaler control register is changed from 0 to 1. The Prescaler buffer is updated with the new value. The Prescaler counter counts 0, 1, 0, 1, 0, 1, 0, 1, indicating a division of 2.
Figure 29. Counter timing diagram with prescaler division change from 1 to 4
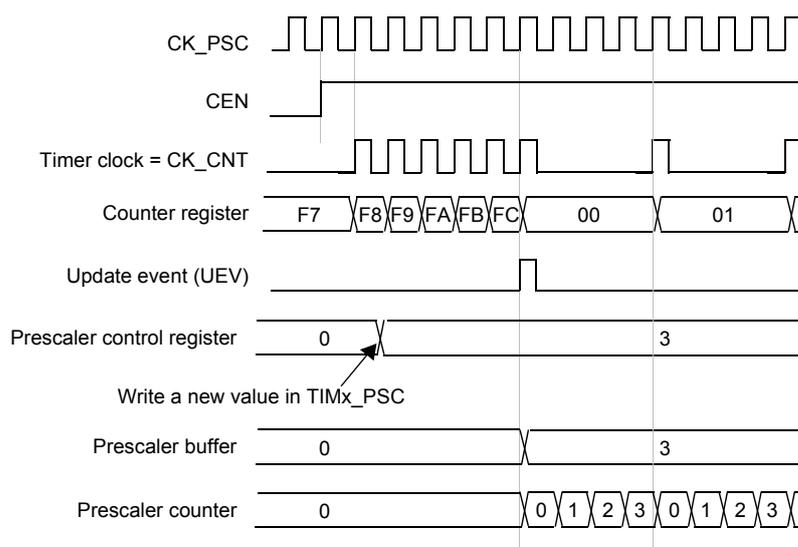
The diagram illustrates the timing of a timer when the prescaler division is changed from 1 to 4. The top signal, CK_PSC, is a periodic clock. The CEN signal is set high to enable the counter. The Timer clock (CK_CNT) is derived from CK_PSC. The Counter register shows values F7, F8, F9, FA, FB, FC, 00, 01. An Update event (UEV) occurs when the counter reaches 00. The Prescaler control register is changed from 0 to 3. The Prescaler buffer is updated with the new value. The Prescaler counter counts 0, 1, 2, 3, 0, 1, 2, 3, indicating a division of 4.
16.3.2 Counter modes
Up-counting mode
In up-counting mode, the counter counts from 0 to the auto-reload value (content of the TIMx_ARR register), then restarts from 0 and generates a counter overflow event.
If the repetition counter is used, the update event (UEV) is generated after up-counting is repeated for the number of times programmed in the repetition counter register (TIMx_RCR) + 1. Otherwise, the update event is generated at each counter overflow.
Setting the UG bit in the TIMx_EGR register (by software or by using the slave mode controller) also generates an update event.
The UEV event can be disabled by software by setting the UDIS bit in the TIMx_CR1 register. This is to avoid updating the shadow registers while writing new values in the preload registers. Then no update event occurs until the UDIS bit has been written to 0. However, the counter restarts from 0, as well as the counter of the prescaler (but the prescale rate does not change). In addition, if the URS bit (update request selection) in TIMx_CR1 register is set, setting the UG bit generates an update event UEV but without setting the UIF flag (thus no interrupt is sent). This is to avoid generating both update and capture interrupts when clearing the counter on the capture event.
When an update event occurs, all the registers are updated and the update flag (UIF bit in TIMx_SR register) is set (depending on the URS bit):
- • The repetition counter is reloaded with the content of TIMx_RCR register
- • The auto-reload shadow register is updated with the preload value (TIMx_ARR)
- • The buffer of the prescaler is reloaded with the preload value (content of the TIMx_PSC register).
The following figures show some examples of the counter behavior for different clock frequencies when TIMx_ARR=0x36.
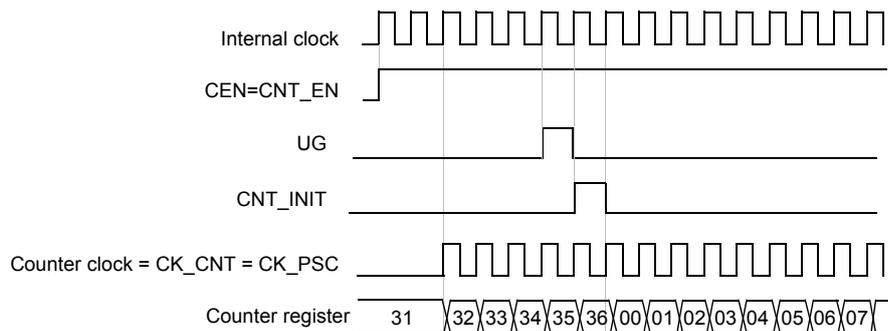
Figure 30. Counter timing diagram, internal clock divided by 1
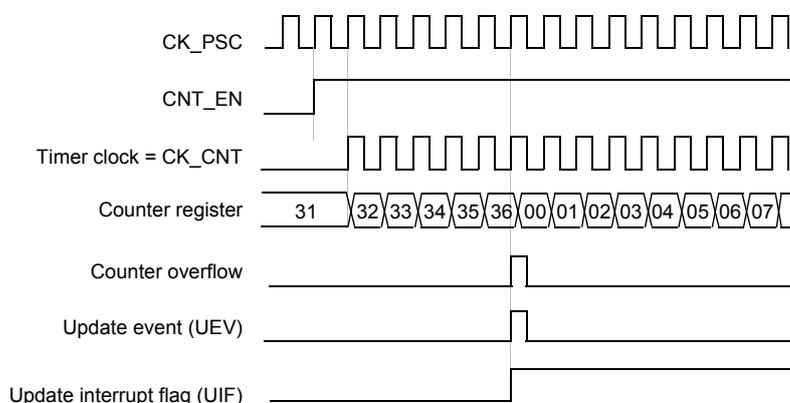
The diagram shows the following signals and values over time:
- CK_PSC : A periodic square wave representing the prescaler clock.
- CNT_EN : A signal that goes high to enable the counter.
- Timer clock = CK_CNT : A square wave that is half the frequency of CK_PSC.
- Counter register : Shows values 31, 32, 33, 34, 35, 36, 00, 01, 02, 03, 04, 05, 06, 07. It increments by 1 on each rising edge of the timer clock.
- Counter overflow : A pulse that goes high when the counter reaches 36 and is about to reset to 00.
- Update event (UEV) : A pulse that goes high at the same time as the counter overflow.
- Update interrupt flag (UIF) : A signal that goes high when the update event occurs.
Figure 31. Counter timing diagram, internal clock divided by 2
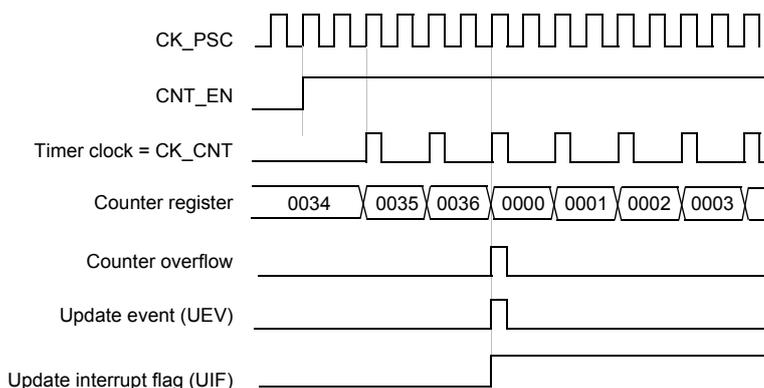
The diagram shows the following signals and values over time:
- CK_PSC : A periodic square wave representing the prescaler clock.
- CNT_EN : A signal that goes high to enable the counter.
- Timer clock = CK_CNT : A square wave that is one-quarter the frequency of CK_PSC (divided by 2 from the previous diagram).
- Counter register : Shows values 0034, 0035, 0036, 0000, 0001, 0002, 0003. It increments by 1 on each rising edge of the timer clock.
- Counter overflow : A pulse that goes high when the counter reaches 0036 and is about to reset to 0000.
- Update event (UEV) : A pulse that goes high at the same time as the counter overflow.
- Update interrupt flag (UIF) : A signal that goes high when the update event occurs.
Figure 32. Counter timing diagram, internal clock divided by 4
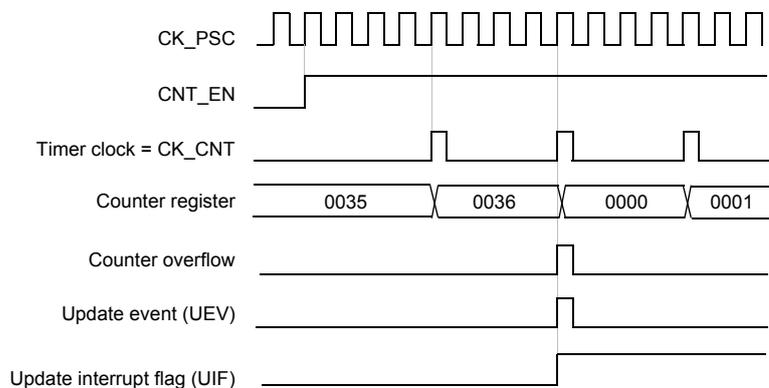
Figure 33. Counter timing diagram, internal clock divided by N
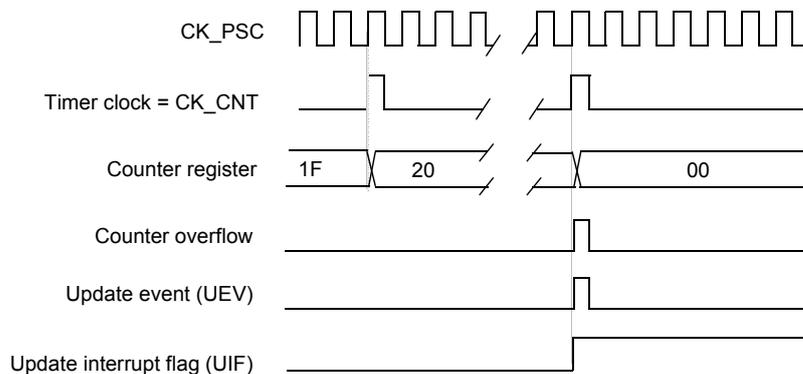
Figure 34. Counter timing diagram, update event when ARPE=0 (TIMx_ARR not preloaded)
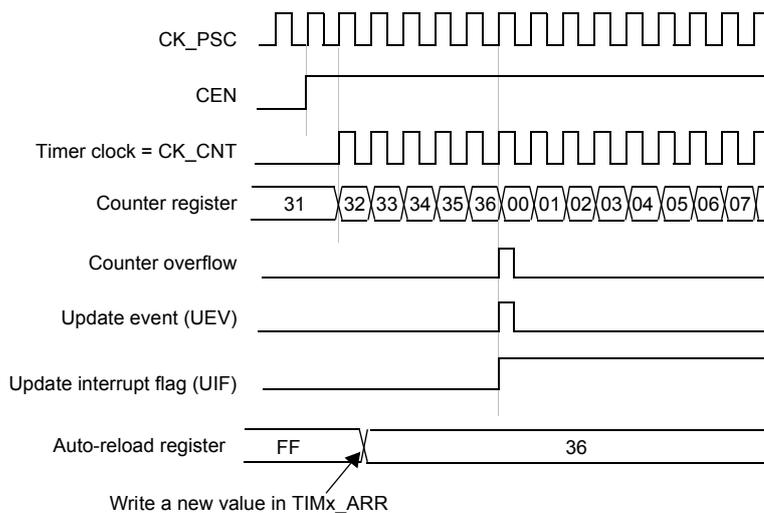
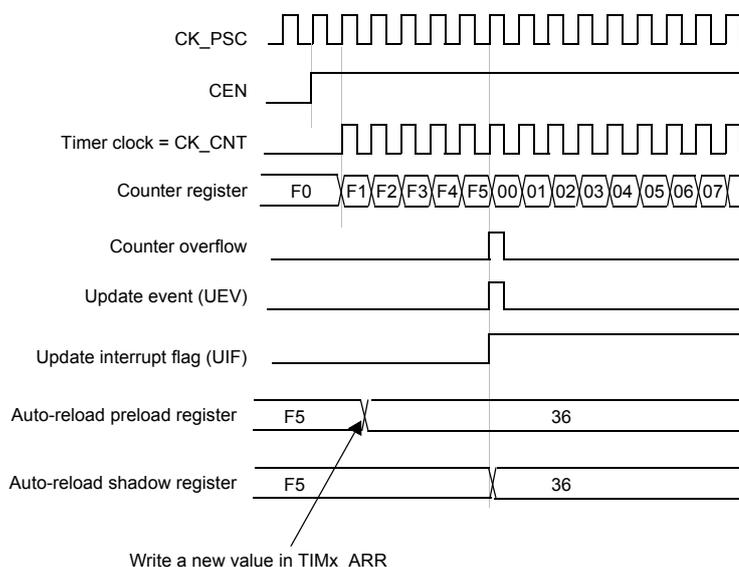
The timing diagram illustrates the following signals and registers over time:
- CK_PSC : Prescaler clock signal, shown as a square wave.
- CEN : Counter Enable signal, shown as a high-level signal.
- Timer clock = CK_CNT : Counter clock signal, derived from CK_PSC.
- Counter register : Shows the counter value decreasing from F0 to F5, then overflowing to 00, and then counting up to 07. The values F0, F1, F2, F3, F4, F5, 00, 01, 02, 03, 04, 05, 06, 07 are shown in sequence.
- Counter overflow : A pulse generated when the counter overflows from 00 to F5.
- Update event (UEV) : A pulse generated when the counter overflows.
- Update interrupt flag (UIF) : A signal that goes high when the counter overflows.
- Auto-reload preload register : Shows the value F5 being updated to 36. An arrow points to the update event with the text "Write a new value in TIMx_ARR".
- Auto-reload shadow register : Shows the value F5 being updated to 36.
Down-counting mode
In down-counting mode, the counter counts from the auto-reload value (content of the TIMx_ARR register) down to 0, then restarts from the auto-reload value and generates a counter underflow event.
If the repetition counter is used, the update event (UEV) is generated after down-counting is repeated for the number of times programmed in the repetition counter register (TIMx_RCR) +1. Otherwise, the update event is generated at each counter underflow.
Setting the UG bit in the TIMx_EGR register (by software or by using the slave mode controller) also generates an update event.
The UEV update event can be disabled by software by setting the UDIS bit in TIMx_CR1 register. This is to avoid updating the shadow registers while writing new values in the preload registers. Then no update event occurs until UDIS bit has been written to 0. However, the counter restarts from the current auto-reload value, whereas the counter of the prescaler restarts from 0 (but the prescale rate does not change).
In addition, if the URS bit (update request selection) in TIMx_CR1 register is set, setting the UG bit generates an update event UEV but without setting the UIF flag (thus no interrupt is sent). This is to avoid generating both update and capture interrupts when clearing the counter on the capture event.
When an update event occurs, all the registers are updated and the update flag (UIF bit in TIMx_SR register) is set (depending on the URS bit):
- • The repetition counter is reloaded with the content of TIMx_RCR register
- • The buffer of the prescaler is reloaded with the preload value (content of the TIMx_PSC register)
- • The auto-reload active register is updated with the preload value (content of the TIMx_ARR register). Note that the auto-reload is updated before the counter is reloaded, so that the next period is the expected one.
The following figures show some examples of the counter behavior for different clock frequencies when TIMx_ARR=0x36.
Figure 36. Counter timing diagram, internal clock divided by 1
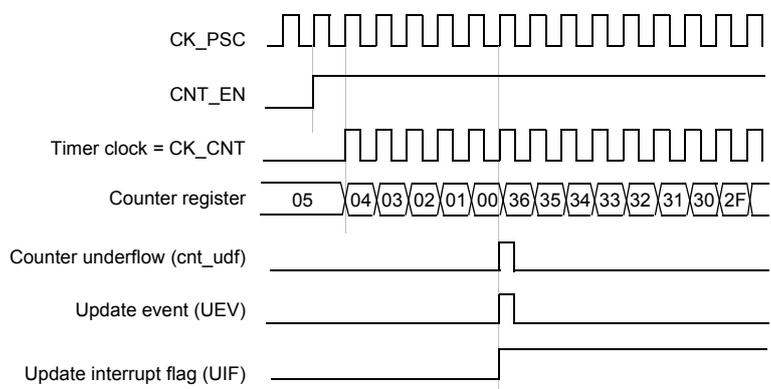
Timing diagram for internal clock divided by 1. The diagram shows the relationship between the prescaler clock (CK_PSC), counter enable (CNT_EN), timer clock (CK_CNT), counter register values, counter underflow (cnt_udf), update event (UEV), and update interrupt flag (UIF). The counter register values are: 05, 04, 03, 02, 01, 00, 36, 35, 34, 33, 32, 31, 30, 2F.
Figure 37. Counter timing diagram, internal clock divided by 2
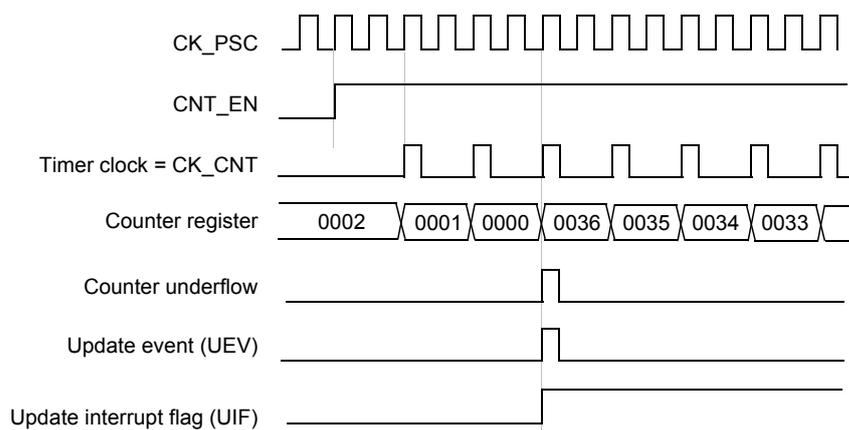
Timing diagram for internal clock divided by 2. The diagram shows the relationship between the prescaler clock (CK_PSC), counter enable (CNT_EN), timer clock (CK_CNT), counter register values, counter underflow (cnt_udf), update event (UEV), and update interrupt flag (UIF). The counter register values are: 002, 001, 000, 036, 035, 034, 033.
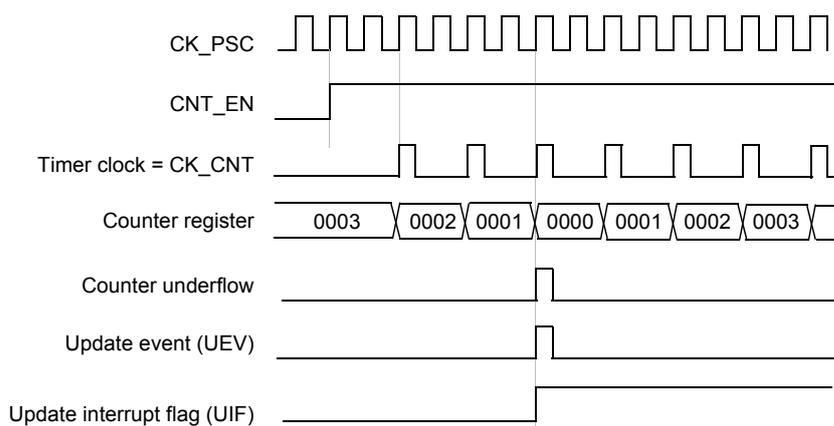
Figure 38. Counter timing diagram, internal clock divided by 4
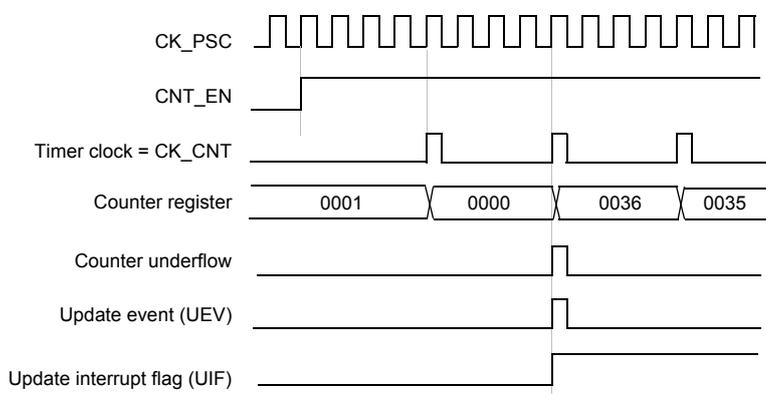
Timing diagram for internal clock divided by 4. The diagram shows the relationship between the prescaler clock (CK_PSC), counter enable (CNT_EN), timer clock (CK_CNT), counter register values, counter underflow (cnt_udf), update event (UEV), and update interrupt flag (UIF). The counter register values are: 0001, 0000, 0036, 0035.
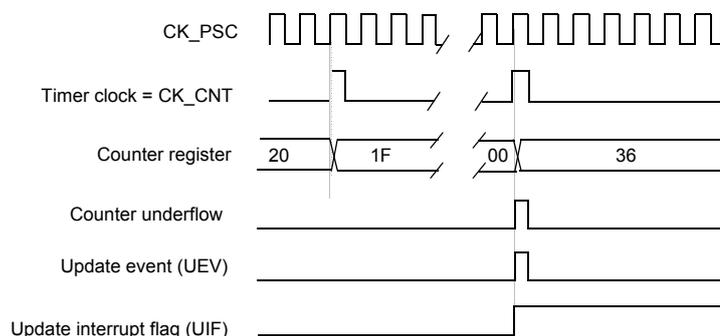
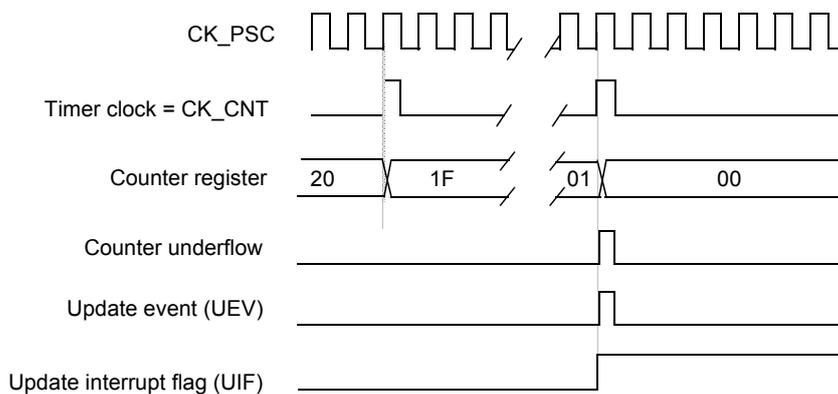
Figure 39 is a timing diagram showing the relationship between several signals over time. The signals are:
- CK_PSC : A periodic square wave representing the prescaler clock.
- Timer clock = CK_CNT : A signal that is half the frequency of CK_PSC. It is shown as a series of pulses.
- Counter register : A register that counts from 20 down to 1F (hexadecimal), then overflows to 00 and counts up to 36.
- Counter underflow : A signal that goes high when the counter register reaches 00.
- Update event (UEV) : A signal that goes high when the counter register reaches 00.
- Update interrupt flag (UIF) : A signal that goes high when the counter register reaches 00 and remains high until cleared.
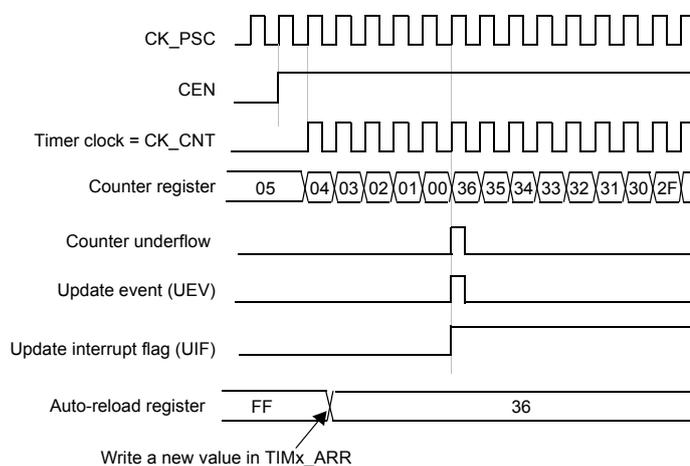
Figure 40 is a timing diagram showing the relationship between several signals over time. The signals are:
- CK_PSC : A periodic square wave representing the prescaler clock.
- CEN : A signal that goes high to enable the counter.
- Timer clock = CK_CNT : A signal that is half the frequency of CK_PSC. It is shown as a series of pulses.
- Counter register : A register that counts from 05 down to 00, then overflows to 36 and counts down to 2F.
- Counter underflow : A signal that goes high when the counter register reaches 00.
- Update event (UEV) : A signal that goes high when the counter register reaches 00.
- Update interrupt flag (UIF) : A signal that goes high when the counter register reaches 00 and remains high until cleared.
- Auto-reload register : A register that is initially set to FF (hexadecimal) and then updated to 36. An arrow points to the update with the text "Write a new value in TIMx_ARR".
Center-aligned mode (up/down-counting)
In center-aligned mode, the counter counts from 0 to the auto-reload value (content of the TIMx_ARR register) – 1, generates a counter overflow event, then counts from the auto-reload value down to 1 and generates a counter underflow event. Then it restarts counting from 0.
Center-aligned mode is active when the CMS bits in TIMx_CR1 register is not equal to '00'. The output compare interrupt flag of channels configured in output is set when: the counter counts down (Center aligned mode 1, CMS = "01"), the counter counts up (Center aligned mode 2, CMS = "10") the counter counts up and down (Center aligned mode 3, CMS = "11").
In this mode, the DIR direction bit in the TIMx_CR1 register cannot be written. It is updated by hardware and gives the current direction of the counter.
The update event can be generated at each counter overflow and at each counter underflow or by setting the UG bit in the TIMx_EGR register (by software or by using the slave mode controller) also generates an update event. In this case, the counter restarts counting from 0, as well as the counter of the prescaler.
The UEV update event can be disabled by software by setting the UDIS bit in the TIMx_CR1 register. This is to avoid updating the shadow registers while writing new values in the preload registers. Then no update event occurs until UDIS bit has been written to 0. However, the counter continues counting up and down, based on the current auto-reload value.
In addition, if the URS bit (update request selection) in TIMx_CR1 register is set, setting the UG bit generates a UEV update event but without setting the UIF flag (thus no interrupt is sent). This is to avoid generating both update and capture interrupts when clearing the counter on the capture event.
When an update event occurs, all the registers are updated and the update flag (UIF bit in TIMx_SR register) is set (depending on the URS bit):
- • The repetition counter is reloaded with the content of TIMx_RCR register
- • The buffer of the prescaler is reloaded with the preload value (content of the TIMx_PSC register)
- • The auto-reload active register is updated with the preload value (content of the TIMx_ARR register). Note that if the update source is a counter overflow, the auto-reload is updated before the counter is reloaded, so that the next period is the expected one (the counter is loaded with the new value).
The following figures show some examples of the counter behavior for different clock frequencies.
Figure 41. Counter timing diagram, internal clock divided by 1, TIMx_ARR = 0x6
Note: Here, center-aligned mode 1 is used (for more details refer to Section 16.4: TIM2 registers).
Figure 42. Counter timing diagram, internal clock divided by 2
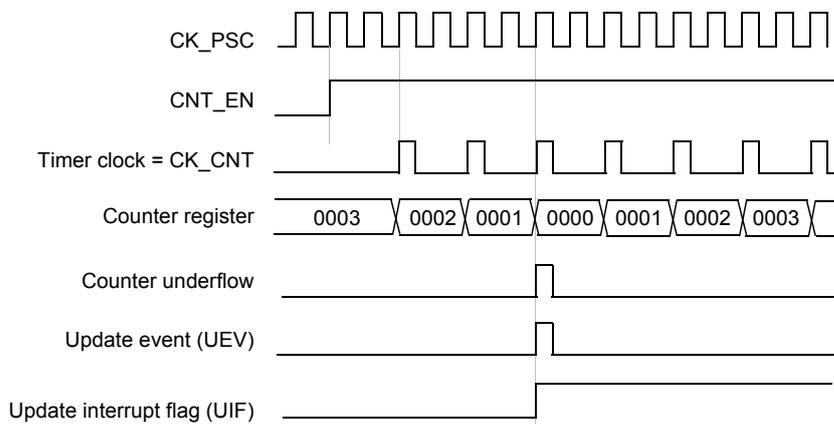
Figure 43. Counter timing diagram, internal clock divided by 4, TIMx_ARR=0x36

Timing diagram for Figure 43. The diagram shows the relationship between several signals over time. CK_PSC is a periodic square wave. CNT_EN is a signal that goes high to enable the counter. Timer clock = CK_CNT is derived from CK_PSC and is shown as a series of pulses. The Counter register shows values 0034, 0035, 0036, and 0035. A Counter overflow event occurs when the counter reaches 0036 and rolls over to 0035. This overflow triggers an Update event (UEV) and sets the Update interrupt flag (UIF) . A note indicates that center-aligned mode 2 or 3 is used with an UIF on overflow.
Figure 44. Counter timing diagram, internal clock divided by N
Timing diagram for Figure 44. The diagram shows the relationship between several signals over time. CK_PSC is a periodic square wave. Timer clock = CK_CNT is derived from CK_PSC and is shown as a series of pulses. The Counter register shows values 20, 1F, 01, and 00. A Counter underflow event occurs when the counter reaches 00 and rolls over to 01. This underflow triggers an Update event (UEV) and sets the Update interrupt flag (UIF) .
Figure 45. Counter timing diagram, update event with ARPE=1 (counter underflow)
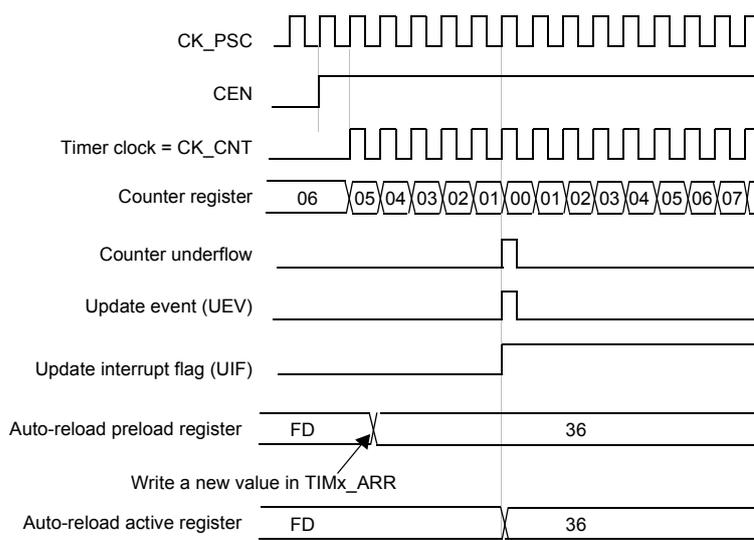
Timing diagram for Figure 45. The diagram shows the relationship between several signals over time. CK_PSC is a periodic square wave. CEN is a signal that goes high to enable the counter. Timer clock = CK_CNT is derived from CK_PSC and is shown as a series of pulses. The Counter register shows values 06, 05, 04, 03, 02, 01, 00, 01, 02, 03, 04, 05, 06, 07. A Counter underflow event occurs when the counter reaches 00 and rolls over to 01. This underflow triggers an Update event (UEV) and sets the Update interrupt flag (UIF) . The Auto-reload preload register shows values FD and 36. A note indicates that a new value is written in TIMx_ARR. The Auto-reload active register shows values FD and 36.
Figure 46. Counter timing diagram, update event with ARPE=1 (counter overflow)
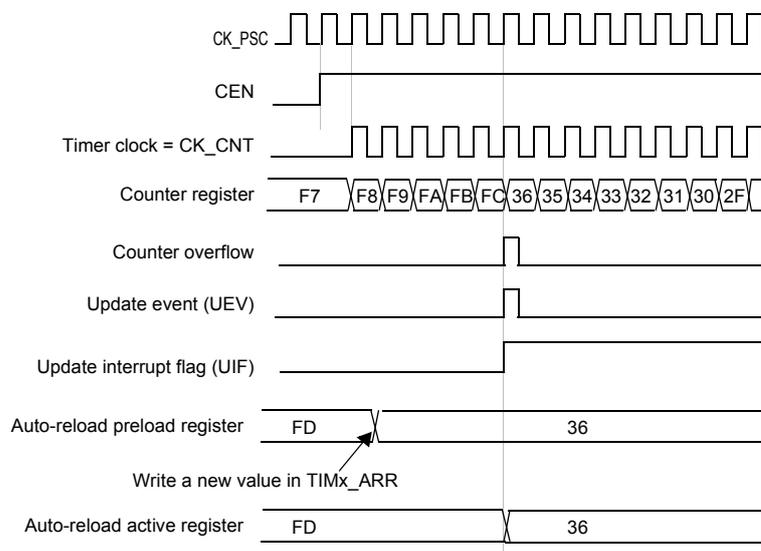
The timing diagram illustrates the sequence of events during a counter overflow with ARPE=1:
- CK_PSC: Prescaler clock signal, shown as a square wave.
- CEN: Counter Enable signal, which goes high to start the counter.
- Timer clock = CK_CNT: The clock signal for the counter, derived from CK_PSC.
- Counter register: Shows the counter values increasing: F7, F8, F9, FA, FB, FC, 36, 35, 34, 33, 32, 31, 30, 2F. The values 36 through 2F represent the overflow sequence (0x36 down to 0x2F).
- Counter overflow: A pulse generated when the counter reaches its maximum value and overflows.
- Update event (UEV): A pulse generated at the overflow event.
- Update interrupt flag (UIF): A flag that is set by the UEV pulse.
- Auto-reload preload register: Contains the value FD. An arrow indicates a write to TIMx_ARR, and the value changes to 36 at the UEV.
- Auto-reload active register: Contains the value FD. The value changes to 36 at the UEV.
16.3.3 Repetition counter
Section 16.3.1: Time-base unit describes how the update event (UEV) is generated with respect to the counter overflows/underflows. It is actually generated only when the repetition counter has reached zero. This can be useful when generating PWM signals.
This means that data are transferred from the preload registers to the shadow registers (TIMx_ARR auto-reload register, TIMx_PSC prescaler register, but also TIMx_CCRx capture/compare registers in compare mode) every N+1 counter overflows or underflows, where N is the value in the TIMx_RCR repetition counter register.
The repetition counter is decremented:
- • At each counter overflow in up-counting mode
- • At each counter underflow in down-counting mode
- • At each counter overflow and at each counter underflow in center-aligned mode. Although this limits the maximum number of repetition to 128 PWM cycles, it makes it possible to update the duty cycle twice per PWM period. When refreshing compare registers only once per PWM period in center-aligned mode, maximum resolution is \( 2 \times T_{ck} \) , due to the symmetry of the pattern.
The repetition counter is an auto-reload type; the repetition rate is maintained as defined by the TIMx_RCR register value (refer to Figure 47. Update rate examples depending on mode and TIMx_RCR register settings).
When the update event is generated by software (by setting the UG bit in TIMx_EGR register) or by hardware through the slave mode controller, it occurs immediately whatever the value of the repetition counter is and the repetition counter is reloaded with the content of the TIMx_RCR register.
In center-aligned mode, for odd values of RCR, the update event occurs either on the overflow or on the underflow depending on when the RCR register was written and when the counter was launched: if the RCR was written before launching the counter, the UEV occurs on the overflow. If the RCR was written after launching the counter, the UEV occurs on the underflow.
For example, for RCR = 3, the UEV is generated each 4 th overflow or underflow event depending on when the RCR was written.
Figure 47. Update rate examples depending on mode and TIMx_RCR register settings
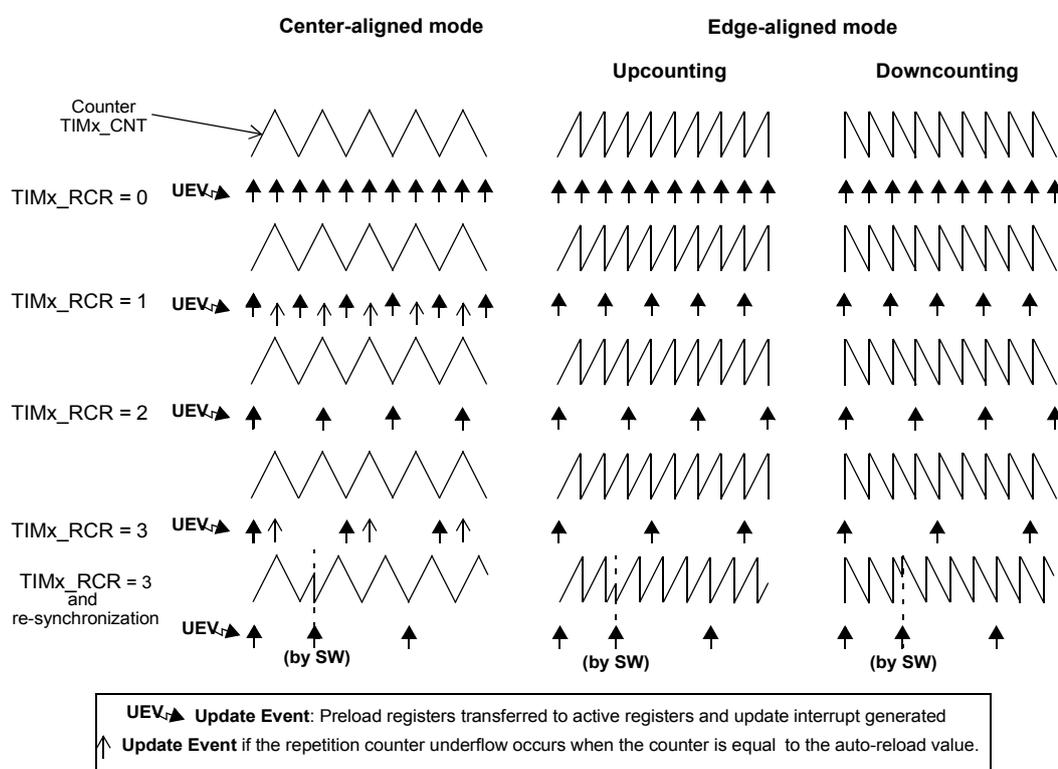
The figure displays timing diagrams for the TIMx_CNT counter and the resulting Update Event (UEV) for different timer modes and repetition counter (TIMx_RCR) settings.
- Center-aligned mode:
The counter (TIMx_CNT) generates a sawtooth-like waveform. UEVs (indicated by upward arrows) occur at every overflow and underflow.
- For TIMx_RCR = 0, UEVs occur at every overflow/underflow.
- For TIMx_RCR = 1, UEVs occur every 2 cycles.
- For TIMx_RCR = 2, UEVs occur every 3 cycles.
- For TIMx_RCR = 3, UEVs occur every 4 cycles. A note indicates that for odd RCR values, the timing of the first UEV depends on whether the counter was launched before or after the RCR register was written (labeled 'by SW').
- Edge-aligned mode:
This mode is split into
Upcounting
and
Downcounting
.
- In Upcounting , the counter increases from 0 to ARR. UEVs occur only at the overflow (when the counter reaches ARR+1).
- In Downcounting , the counter decreases from ARR to 0. UEVs occur only at the underflow (when the counter reaches 0).
- In both cases, the frequency of UEVs is determined by the TIMx_RCR value (e.g., every 4 cycles for RCR=3).
Legend:
- UEV (Update Event): Preload registers transferred to active registers and update interrupt generated.
- Update Event if the repetition counter underflow occurs when the counter is equal to the auto-reload value: This specific condition is highlighted for center-aligned mode with odd RCR values.
16.3.4 External trigger input
The timer features an external trigger input ETR. It can be used as:
- • External clock (external clock mode 2, see Section 16.3.5: Clock selection )
- • Trigger for the slave mode (see Section 16.4: TIM2 registers )
- • PWM reset input for cycle-by-cycle current regulation Section 16.3.14: Clearing the OCxREF signal on an external event ).
Figure 48. External trigger input block below describes the ETR input conditioning. The input polarity is defined with the ETP bit in TIMx_SMCR register. The trigger can be prescaled with the divider programmed by the ETPS[1:0] bit field and digitally filtered with the ETF[3:0] bit field.
Figure 48. External trigger input block
![Block diagram of the External trigger input block. The ETR input pin is connected to a polarity control block (ETP bit in TIMx_SMCR) which can invert the signal. The output of this block goes to a divider (ETPS[1:0] bit field in TIMx_SMCR) with options /1, /2, /4, /8. The output of the divider (ETRP) goes to a filter downcounter (ETF[3:0] bit field in TIMx_SMCR). The output of the filter (ETRF) is connected to a multiplexer. The multiplexer selects between encoder mode (TI2F or TI1F), external clock mode 1 (TRGI), external clock mode 2 (ETRF), and internal clock mode (CK_INT). The output of the multiplexer is CK_PSC. The multiplexer is controlled by ECE and SMS[2:0] bits in TIMx_SMCR.](/RM0529-STM32WB05xZ/923c3bd3420f28b00798eed4f8eeacd1_img.jpg)
The ETR input comes from input pins (see Table 7. GPIO alternate options AF0, AF1 and AF2 modes and Table 8. GPIOs AF3, AF4 and AF6 modes ).
16.3.5 Clock selection
The counter clock can be provided by the following clock sources:
- • Internal clock (CK_INT)
- • External clock mode1: external input pin
Note: Only channel 1 and channel 2 support the external clock mode 1.
- • External clock mode 2: external trigger input ETR
- • Encoder mode.
Internal clock source (CK_INT)
If the slave mode controller is disabled (SMS=000), then the CEN, DIR (in the TIMx_CR1 register) and UG bits (in the TIMx_EGR register) are actual control bits and can be changed only by software (except UG which remains cleared automatically). As soon as the CEN bit is written to 1, the prescaler is clocked by the internal clock CK_INT.
Figure 49. Control circuit in normal mode, internal clock divided by 1 shows the behavior of the control circuit and the upcounter in normal mode, without prescaler.
Figure 49. Control circuit in normal mode, internal clock divided by 1
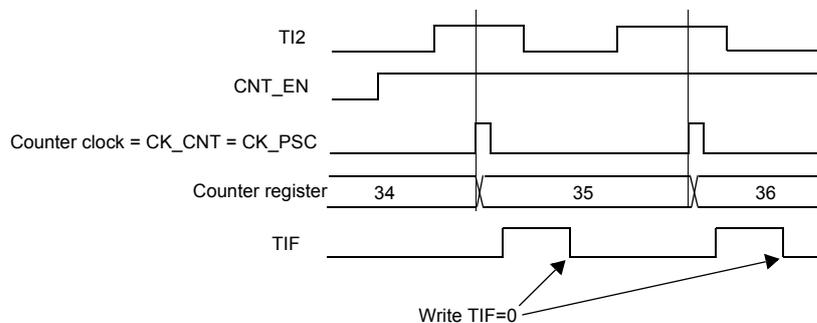
External clock source mode 1
This mode is selected when SMS=111 in the TIMx_SMCR register. The counter can count at each rising or falling edge on a selected input.
Figure 50. TI2 external clock connection example
![Figure 50: TI2 external clock connection example. This block diagram shows the internal logic for external clock source mode 1. An external TI2 input passes through a Filter (configured by ICF[3:0] in TIMx_CCMR1) and an Edge Detector (configured by CC2P in TIMx_CCER). The Edge Detector outputs 'TI2F_Rising' and 'TI2F_Falling' signals. These are multiplexed based on the TS[2:0] bits in the TIMx_SMCR register. The multiplexer selects between ITRx, TI1F_ED, TI1FP1, TI2FP2, and ETRF. The selected signal is then processed by an encoder mode or external clock mode 1 block, which also takes TRGI and ETRF signals. The output of this block is the CK_PSC signal. The CK_INT (internal clock) is also shown as an input to the external clock mode 1 block. The ECE and SMS[2:0] bits in the TIMx_SMCR register are also shown as inputs to the external clock mode 1 block.](/RM0529-STM32WB05xZ/3d6dbebf94a27041f730a0dcc7e3dfda_img.jpg)
For example, to configure the upcounter to count in response to a rising edge on the TI2 input, use the following procedure:
- 1. Select the proper TI2x source (internal or external) with the TI2SEL[3:0] bits in the TIMx_TISEL register.
- 2. Configure channel 2 to detect rising edges on the TI2 input by writing CC2S = '01' in the TIMx_CCMR1 register.
- 3. Configure the input filter duration by writing the IC2F[3:0] bits in the TIMx_CCMR1 register (if no filter is needed, keep IC2F=0000).
- 4. Select rising edge polarity by writing CC2P=0 and CC2NP=0 in the TIMx_CCER register.
- 5. Configure the timer in external clock mode 1 by writing SMS=111 in the TIMx_SMCR register.
- 6. Select TI2 as the trigger input source by writing TS=110 in the TIMx_SMCR register.
- 7. Enable the counter by writing CEN=1 in the TIMx_CR1 register.
Note: The capture prescaler is not used for triggering, so you do not need to configure it.
When a rising edge occurs on TI2, the counter counts once and the TIF flag is set.
The delay between the rising edge on TI2 and the actual clock of the counter is due to the resynchronization circuit on TI2 input.
Figure 51. Control circuit in external clock mode 1
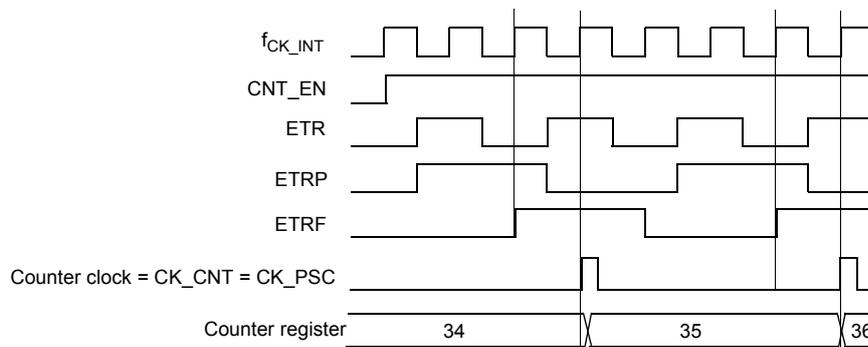
External clock source mode 2
This mode is selected by writing ECE=1 in the TIMx_SMCR register.
The counter can count at each rising or falling edge on the external trigger input ETR. Shown below in Figure 52. External trigger input block.
Figure 52. External trigger input block
![Block diagram of the external trigger input block. The ETR input pin is connected to a multiplexer (0 or 1) controlled by ETP in the TIMx_SMCR register. The output of the multiplexer goes to a divider (/1, /2, /4, /8) controlled by ETPS[1:0] in the TIMx_SMCR register. The output of the divider is ETRP. ETRP goes to a filter downcounter controlled by ETF[3:0] in the TIMx_SMCR register. The output of the filter downcounter is ETRF. ETRF is connected to a multiplexer for external clock mode 2. Other inputs to this multiplexer are TI2F or T11F (or T11F or T12F), TRGI, and CK_INT (internal clock). The output of this multiplexer is CK_PSC. The multiplexer is controlled by ECE and SMS[2:0] in the TIMx_SMCR register.](/RM0529-STM32WB05xZ/095cb128d8f8cc689f28744e6d5d798d_img.jpg)
For example, to configure the upcounter to count each 2 rising edges on ETR, use the following procedure:
- 1. As no filter is needed in this example, write ETF[3:0]=0000 in the TIMx_SMCR register.
- 2. Set the prescaler by writing ETPS[1:0]=01 in the TIMx_SMCR register.
- 3. Select rising edge detection on the ETR pin by writing ETP=0 in the TIMx_SMCR register.
- 4. Enable external clock mode 2 by writing ECE=1 in the TIMx_SMCR register.
- 5. Enable the counter by writing CEN=1 in the TIMx_CR1 register.
The counter counts once each 2 ETR rising edges.
The delay between the rising edge on ETR and the actual clock of the counter is due to the resynchronization circuit on the ETRP signal.
Figure 53. Control circuit in external clock mode 2
16.3.6 Capture/compare channels
Each capture/compare channel is built around a capture/compare register (including a shadow register), an input stage for capture (with digital filter, multiplexing, and prescaler, except for channels 5 and 6) and an output stage (with comparator and output control).
Figure 54. Capture/compare channel (example: channel 1 input stage) to Figure 56. Output stage of capture/compare channel (channel 4, 3, 2 and 1) to give an overview of one capture/compare channel.
The input stage samples the corresponding TIx input to generate a filtered signal TIxF. Then, an edge detector with polarity selection generates a signal (TIxFPx) which can be used as trigger input by the slave mode controller or as the capture command. It is prescaled before the capture register (ICxPS).
Figure 54. Capture/compare channel (example: channel 1 input stage)![Figure 54: Capture/compare channel (example: channel 1 input stage) block diagram. The diagram shows the input stage for channel 1. An external signal TI1 passes through a filter downcounter (controlled by ICF[3:0] from TIMx_CCMR1) to produce TI1F. This signal then goes through an Edge Detector to produce TI1F_Rising and TI1F_Falling signals. These signals are multiplexed with TI2F signals (from channel 2) to produce TI1FP1 and TI2FP1. These signals are then multiplexed with TRC (from slave mode controller) to produce IC1. IC1 passes through a divider (/1, /2, /4, /8) to produce IC1PS. The divider is controlled by CC1S[1:0] and ICPS[1:0] from TIMx_CCMR1 and CC1E from TIMx_CCER. The TI1F signals are also used to generate TI1F_ED, which is sent to the slave mode controller.](/RM0529-STM32WB05xZ/ed433287faf6ca3f88eaaf14968986d6_img.jpg)
The output stage generates an intermediate waveform which is then used for reference: OCxRef (active high). The polarity acts at the end of the chain.
Figure 55. Capture/compare channel 1 main circuit![Figure 55: Capture/compare channel 1 main circuit block diagram. This diagram shows the main circuit for channel 1. It includes an APB Bus connected to an MCU-peripheral interface. The interface controls a Capture/compare preload register and a Capture/compare shadow register. The preload register is used for writing (write CCR1H, write CCR1L) and reading (read CCR1H, read CCR1L) the capture/compare value. The shadow register is used for capture and compare operations. The capture operation is triggered by a capture_transfer signal from the input mode logic. The compare operation is triggered by a compare_transfer signal from the output mode logic. The output mode logic includes a comparator that compares the counter value (CNT) with the capture/compare value (CCR1). The output of the comparator is used to generate an interrupt (UEV from time base unit) and to control the output stage (OC1PE, OC1E). The output stage is controlled by CC1S[1], CC1S[0], IC1PS, CC1E, and CC1G from TIMx_EGR. The output stage generates the OC1 signal.](/RM0529-STM32WB05xZ/035b1a67ac3f04ae2f5218c450186c9a_img.jpg)
![Figure 56: Output stage of capture/compare channel (channel 4, 3, 2 and 1) block diagram. This diagram shows the output stage for channels 4, 3, 2, and 1. It starts with an Output mode controller that takes inputs CNT > CCR4 and CNT = CCR4 from the counter and OCREF_CLR from the OCREF_CLR input. The controller generates OC4REF and OC3REF signals. These signals are multiplexed to produce OC4REFC. OC4REFC is then multiplexed with '0' to produce a signal that goes through an inverter and then through an Output enable circuit to produce the final output OC4. The Output mode controller is also controlled by OC4CE and OC4M[3:0] from TIMx_CCMR2. The Output enable circuit is controlled by CC4E, CC4P, and CC4E from TIMx_CCER.](/RM0529-STM32WB05xZ/c9b60c933b2d78d557ac4bbe08b1f8fb_img.jpg)
The capture/compare block is made of one preload register and one shadow register. Write and read always access the preload register.
In capture mode, captures are actually done in the shadow register, which is copied into the preload register.
In compare mode, the content of the preload register is copied into the shadow register which is compared to the counter.
16.3.7 Input capture mode
In input capture mode, the capture/compare registers (TIMx_CCRx) are used to latch the value of the counter after a transition detected by the corresponding ICx signal. When a capture occurs, the corresponding CCxIF flag (TIMx_SR register) is set and an interrupt can be sent if they are enabled. If a capture occurs while the CCxIF flag was already high, then the overcapture flag CCxOF (TIMx_SR register) is set. CCxIF can be cleared by software by writing it to '0' or by reading the captured data stored in the TIMx_CCRx register. CCxOF is cleared when you write it to '0'.
The following example shows how to capture the counter value in TIMx_CCR1 when TI1 input rises. To do this, use the following procedure:
- • Select the active input: TIMx_CCR1 must be linked to the TI1 input, so write the CC1S bits to 01 in the TIMx_CCMR1 register. As soon as CC1S becomes different from 00, the channel is configured in input and the TIMx_CCR1 register becomes read-only.
- • Program the input filter duration you need with respect to the signal you connect to the timer (when the input is one of the TIx (ICxF bits in the TIMx_CCMRx register). Imagine that, when toggling, the input signal is not stable during, at most, 5 internal clock cycles. A filter duration longer than these 5 clock cycles must be programmed. A transition on TI1 can be validated when 8 consecutive samples with the new level have been detected (sampled at fDTS frequency). Then write IC1F bits to 0011 in the TIMx_CCMR1 register.
- • Select the edge of the active transition on the TI1 channel by writing CC1P and CC1NP bits to 0 in the TIMx_CCER register (rising edge in this case).
- • Program the input prescaler. In our example, we wish the capture to be performed at each valid transition, so the prescaler is disabled (write IC1PS bits to '00' in the TIMx_CCMR1 register).
- • Enable capture from the counter into the capture register by setting the CC1E bit in the TIMx_CCER register.
- • If needed, enable the related interrupt request by setting the CC1IE bit in the TIMx_DIER register. When an input capture occurs:
- – The TIMx_CCR1 register gets the value of the counter on the active transition.
- – CC1IF flag is set (interrupt flag). CC1OF is also set if at least two consecutive captures occurred whereas the flag was not cleared.
- – An interrupt is generated depending on the CC1IE bit
- – A DMA request is generated depending on the CC1DE bit.
In order to handle the overcapture, it is recommended to read the data before the overcapture flag. This is to avoid missing an overcapture which could happen after reading the flag and before reading the data.
Note: IC interrupt and/or DMA requests can be generated by software by setting the corresponding CCxG bit in the TIMx_EGR register.
16.3.8 PWM input mode
Note: Only channel 1 and channel 2 support this PWM input mode.
This mode is a particular case of input capture mode. The procedure is the same except:
- • Two ICx signals are mapped on the same TIx input
- • These 2 ICx signals are active on edges with opposite polarity
- • One of the two TIxFP signals is selected as trigger input and the slave mode controller is configured in reset mode.
For example, you can measure the period (in TIMx_CCR1 register) and the duty cycle (in TIMx_CCR2 register) of the PWM applied on TI1 using the following procedure (depending on CK_INT frequency and prescaler value):
- • Select the active input for TIMx_CCR1: write the CC1S bits to 01 in the TIMx_CCMR1 register (TI1 selected).
- • Select the active polarity for TI1FP1 (used both for capture in TIMx_CCR1 and counter clear): write the CC1P and CC1NP bits to '0' (active on rising edge).
- • Select the active input for TIMx_CCR2: write the CC2S bits to 10 in the TIMx_CCMR1 register (TI1 selected).
- • Select the active polarity for TI1FP2 (used for capture in TIMx_CCR2): write the CC2P and CC2NP bits to CC2P/CC2NP='10' (active on falling edge).
- • Select the valid trigger input: write the TS bits to 101 in the TIMx_SMCR register (TI1FP1 selected).
- • Configure the slave mode controller in reset mode: write the SMS bits to 0100 in the TIMx_SMCR register.
- • Enable the captures: write the CC1E and CC2E bits to '1' in the TIMx_CCER register.
Figure 57. PWM input mode timing
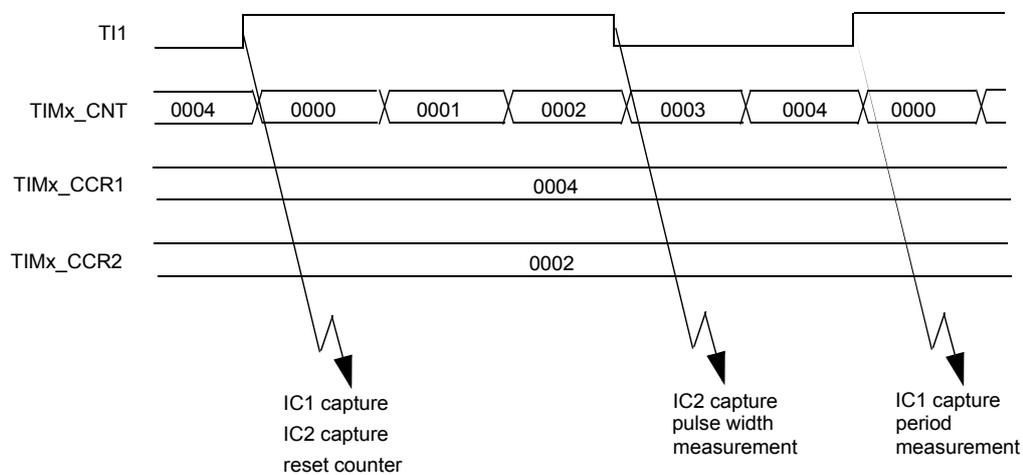
The timing diagram shows the relationship between the TI1 input signal, the TIMx_CNT counter, and the capture registers TIMx_CCR1 and TIMx_CCR2 during PWM input mode.
- TI1: The input signal is a PWM signal. It starts high, then goes low, then high again, then low again, and finally goes high.
- TIMx_CNT: The counter values are shown in a sequence of intervals: 0004, 0000, 0001, 0002, 0003, 0004, 0000. The counter resets to 0000 at the first falling edge of TI1.
- TIMx_CCR1: The value 0004 is captured at the first falling edge of TI1.
- TIMx_CCR2: The value 0002 is captured at the first rising edge of TI1.
Annotations with arrows pointing to specific edges of the TI1 signal:
- The first falling edge is labeled: "IC1 capture", "IC2 capture", "reset counter".
- The first rising edge is labeled: "IC2 capture", "pulse width measurement".
- The second falling edge is labeled: "IC1 capture", "period measurement".
16.3.9 Forced output mode
In output mode (CCxS bits = 00 in the TIMx_CCMRx register), each output compare signal (OCxREF and then OCx/OCxN) can be forced to active or inactive level directly by software, independently of any comparison between the output compare register and the counter.
To force an output compare signal (OCxREF/OCx) to its active level, you just need to write 0101 in the OCxM bits in the corresponding TIMx_CCMRx register. Thus, OCxREF is forced high (OCxREF is always active high) and OCx gets an opposite value to CCxP polarity bit.
For example: CCxP=0 (OCx active high) => OCx is forced to high level.
The OCxREF signal can be forced low by writing the OCxM bits to 0100 in the TIMx_CCMRx register.
Anyway, the comparison between the TIMx_CCRx shadow register and the counter is still performed and allows the flag to be set. Interrupt and DMA requests can be sent accordingly. This is described in the output compare mode section below.
16.3.10 Output compare mode
This function is used to control an output waveform or indicate when a period of time has elapsed. Channels 1 to 6 can be output.
When a match is found between the capture/compare register and the counter, the output compare function:
- • Assigns the corresponding output pin to a programmable value defined by the output compare mode (OCxM bits in the TIMx_CCMRx register) and the output polarity (CCxP bit in the TIMx_CCER register). The output pin can keep its level (OCxM=0000), be set active (OCxM=0001), be set inactive (OCxM=0010) or can toggle (OCxM=0011) on match.
- • Sets a flag in the interrupt status register (CCxIF bit in the TIMx_SR register).
- • Generates an interrupt if the corresponding interrupt mask is set (CCxIE bit in the TIMx_DIER register)
- • Sends a DMA request if the corresponding enable bit is set (CCxDE bit in the TIMx_DIER register, CCDS bit in the TIMx_CR2 register for the DMA request selection).
The TIMx_CCRx registers can be programmed with or without preload registers using the OCxPE bit in the TIMx_CCMRx register.
In output compare mode, the update event UEV has no effect on OCxREF and OCx output. The timing resolution is one count of the counter. Output compare mode can also be used to output a single pulse (in one-pulse mode).
Procedure:
- 1. Select the counter clock (internal, external, prescaler)
- 2. Write the desired data in the TIMx_ARR and TIMx_CCRx registers.
- 3. Set the CCxIE bit if an interrupt request is to be generated.
- 4. Select the output mode. For example:
- a. Write OCxM = 0011 to toggle OCx output pin when CNT matches CCRx
- b. Write OCxPE = 0 to disable preload register
- c. Write CCxP = 0 to select active high polarity
- d. Write CCxE = 1 to enable the output
- 5. Enable the counter by setting the CEN bit in the TIMx_CR1 register.
The TIMx_CCRx register can be updated at any time by software to control the output waveform, provided that the preload register is not enabled (OCxPE='0', otherwise the TIMx_CCRx shadow register is updated only at the next update event UEV). An example is given in Figure 58. Output compare mode, toggle on OC1
Figure 58. Output compare mode, toggle on OC1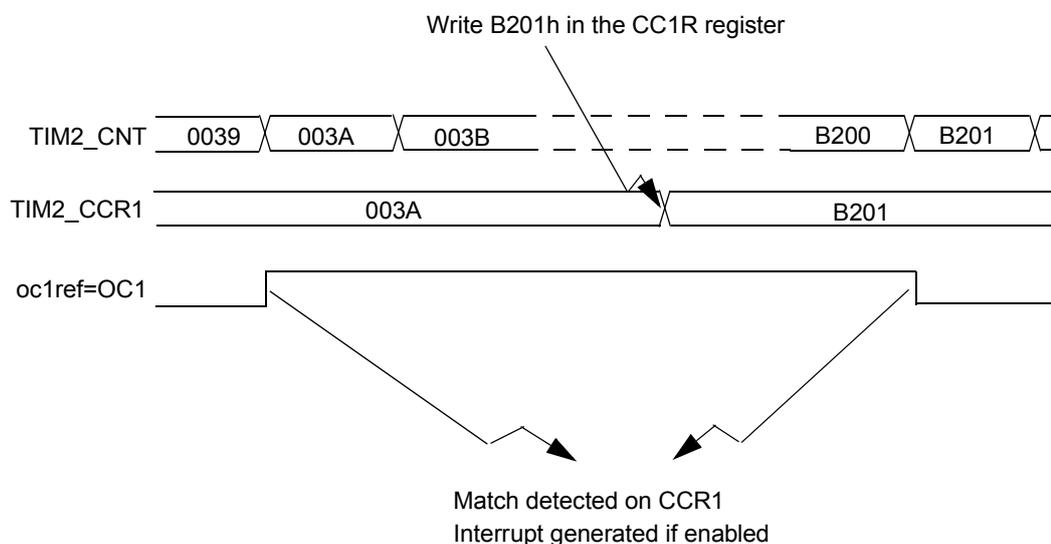
16.3.11 PWM mode
Pulse width modulation mode allows you to generate a signal with a frequency determined by the value of the TIMx_ARR register and a duty cycle determined by the value of the TIMx_CCRx register.
The PWM mode can be selected independently on each channel (one PWM per OCx output) by writing '0110' (PWM mode 1) or '0111' (PWM mode 2) in the OCxM bits in the TIMx_CCMRx register. You must enable the corresponding preload register by setting the OCxPE bit in the TIMx_CCMRx register, and eventually the auto-reload preload register (in up-counting or center-aligned modes) by setting the ARPE bit in the TIMx_CR1 register.
As the preload registers are transferred to the shadow registers only when an update event occurs, before starting the counter, you have to initialize all the registers by setting the UG bit in the TIMx_EGR register.
OCx polarity is software programmable using the CCxP bit in the TIMx_CCER register. It can be programmed as active high or active low. OCx output is enabled by a combination of the CCxE, CCxNE, MOE, OSSI and OSSR bits (TIMx_CCER and TIMx_BDTR registers). Refer to the TIMx_CCER register description for more details.
In PWM mode (1 or 2), TIMx_CNT and TIMx_CCRx are always compared to determine whether \( TIMx\_CCRx \leq TIMx\_CNT \) or \( TIMx\_CNT \leq TIMx\_CCRx \) (depending on the direction of the counter).
The timer is able to generate PWM in edge-aligned mode or center-aligned mode depending on the CMS bits in the TIMx_CR1 register.
PWM edge-aligned mode
- Up-counting configuration
Up-counting is active when the DIR bit in the TIMx_CR1 register is low. Refer to Section 16.3.2: Counter modes .
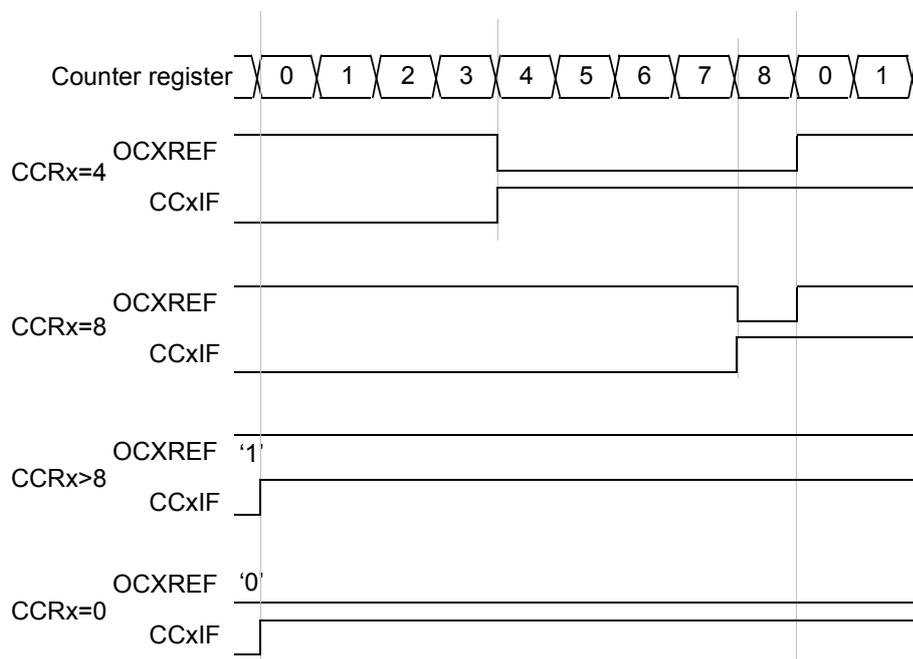
In the following example, we consider PWM mode 1. The reference PWM signal OCxREF is high as long as \( TIMx\_CNT < TIMx\_CCRx \) , otherwise it becomes low. If the compare value in TIMx_CCRx is greater than the auto-reload value (in TIMx_ARR) then OCxREF is held at '1'. If the compare value is 0 then OCxRef is held at '0'.
Figure 59. Edge-aligned PWM waveforms (ARR=8) shows some edge-aligned PWM waveforms in an example where TIMx_ARR=8.
Figure 59. Edge-aligned PWM waveforms (ARR=8)
- Down-counting configuration
Down-counting is active when DIR bit in TIMx_CR1 register is high. Refer to Section 16.3.2: Counter modes .
In PWM mode 1, the reference signal OCxRef is low as long as TIMx_CNT > TIMx_CCRx else it becomes high. If the compare value in TIMx_CCRx is greater than the auto-reload value in TIMx_ARR, then OCxREF is held at '1'. 0% PWM is not possible in this mode.
PWM center-aligned mode
Center-aligned mode is active when the CMS bits in TIMx_CR1 register are different from '00' (all the remaining configurations having the same effect on the OCxRef/OCx signals). The compare flag is set when the counter counts up, when it counts down or both when it counts up and down depending on the CMS bits configuration. The direction bit (DIR) in the TIMx_CR1 register is updated by hardware and must not be changed by software. Refer to Section 16.3.2: Counter modes .
Figure 60. Center-aligned PWM waveforms (ARR=8) shows some center-aligned PWM waveforms in an example where:
- TIMx_ARR=8
- PWM mode is the PWM mode 1
- The flag is set when the counter counts down corresponding to the center-aligned mode 1 selected for CMS=01 in TIMx_CR1 register.
Figure 60. Center-aligned PWM waveforms (ARR=8)
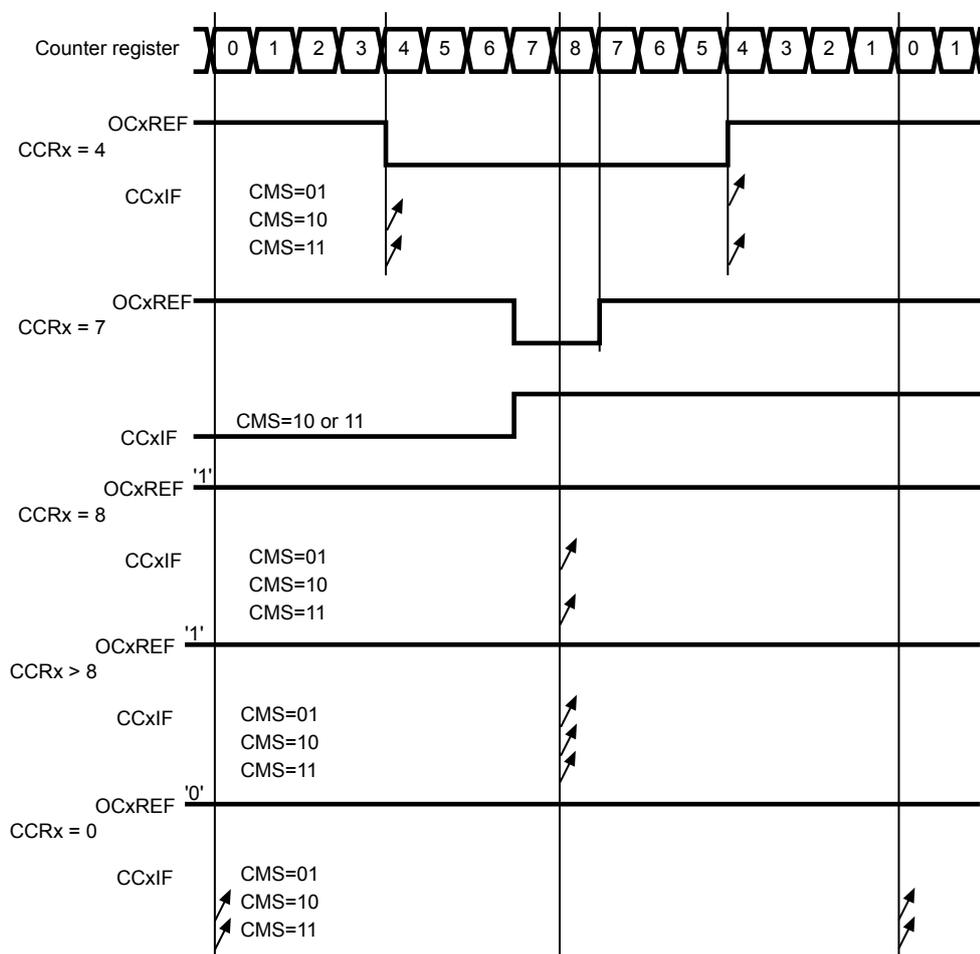
The diagram illustrates the relationship between the Counter register, OCxREF signal, and CCxIF flags for center-aligned PWM mode with ARR=8. The counter sequence is: 0, 1, 2, 3, 4, 5, 6, 7, 8, 7, 6, 5, 4, 3, 2, 1, 0, 1.
- CCR x = 4: OCxREF is high from counter value 4 to 4. CCxIF flags (CMS=01, 10, 11) toggle at counter values 4 and 4.
- CCR x = 7: OCxREF is high from counter value 7 to 7. CCxIF flags (CMS=10 or 11) toggle at counter values 7 and 7.
- CCR x = 8: OCxREF is high ('1') from counter value 8 to 8. CCxIF flags (CMS=01, 10, 11) toggle at counter values 8 and 8.
- CCR x > 8: OCxREF is high ('1') from counter value 8 to 8. CCxIF flags (CMS=01, 10, 11) toggle at counter values 8 and 8.
- CCR x = 0: OCxREF is low ('0') from counter value 0 to 0. CCxIF flags (CMS=01, 10, 11) toggle at counter values 0 and 0.
Hints on using center-aligned mode
- When starting in center-aligned mode, the current up-down configuration is used. It means that the counter counts up or down depending on the value written in the DIR bit in the TIM x _CR1 register. Moreover, the DIR and CMS bits must not be changed at the same time by the software.
- Writing to the counter while running in center-aligned mode is not recommended as it can lead to unexpected results. In particular:
- The direction is not updated if you write a value in the counter that is greater than the auto-reload value (TIM x _CNT>TIM x _ARR). For example, if the counter was counting up, it continues to count up.
- The direction is updated if you write 0 or write the TIM x _ARR value in the counter but no Update Event UEV is generated.
- The safest way to use center-aligned mode is to generate an update by software (setting the UG bit in the TIM x _EGR register) just before starting the counter and not to write the counter while it is running.
16.3.12 Asymmetric PWM mode
Asymmetric mode allows two center-aligned PWM signals to be generated with a programmable phase-shift. While the frequency is determined by the value of the TIM x _ARR register, the duty cycle and the phase-shift are determined by a pair of TIM x _CCR x registers. One register controls the PWM during up-counting, the second during down-counting, so that PWM is adjusted every half PWM cycle:
- OC1REFC (or OC2REFC) is controlled by TIM x _CCR1 and TIM x _CCR2
- OC3REFC (or OC4REFC) is controlled by TIM x _CCR3 and TIM x _CCR4
Asymmetric PWM mode can be selected independently on two channels (one OCx output per pair of CCR registers) by writing '1110' (asymmetric PWM mode 1) or '1111' (asymmetric PWM mode 2) in the OCxM bits in the TIMx_CCMRx register.
Note: The OCxM[3:0] bit field is split into two parts for compatibility reasons, the most significant bit is not contiguous with the 3 least significant ones.
When a given channel is used as asymmetric PWM channel, its complementary channel can also be used. For instance, if an OC1REFC signal is generated on channel 1 (asymmetric PWM mode 1), it is possible to output either the OC2REF signal on channel 2, or an OC2REFC signal resulting from asymmetric PWM mode 1.
Figure 61. Generation of 2 phase-shifted PWM signals with 50% duty cycle represents an example of signals that can be generated using the asymmetric PWM mode (channels 1 to 4 are configured in asymmetric PWM mode 1). Together with the deadtime generator, this allows a full-bridge phase-shifted DC to DC converter to be controlled.
Figure 61. Generation of 2 phase-shifted PWM signals with 50% duty cycle

16.3.13 Combined PWM mode
Combined PWM mode allows two edge or center-aligned PWM signals to be generated with programmable delay and phase-shift between respective pulses. While the frequency is determined by the value of the TIMx_ARR register, the duty cycle and delay are determined by the two TIMx_CCRx registers. The resulting signals, OCxREFC, are made of an OR or AND logical combination of two reference PWMs:
- • OC1REFC (or OC2REFC) is controlled by TIMx_CCR1 and TIMx_CCR2
- • OC3REFC (or OC4REFC) is controlled by TIMx_CCR3 and TIMx_CCR4
Combined PWM mode can be selected independently on two channels (one OCx output per pair of CCR registers) by writing '1100' (combined PWM mode 1) or '1101' (combined PWM mode 2) in the OCxM bits in the TIMx_CCMRx register.
When a given channel is used as combined PWM channel, its complementary channel must be configured in the opposite PWM mode (for instance, one in combined PWM mode 1 and the other in combined PWM mode 2).
Note: The OCxM[3:0] bit field is split into two parts for compatibility reasons, the most significant bit is not contiguous with the 3 least significant ones.
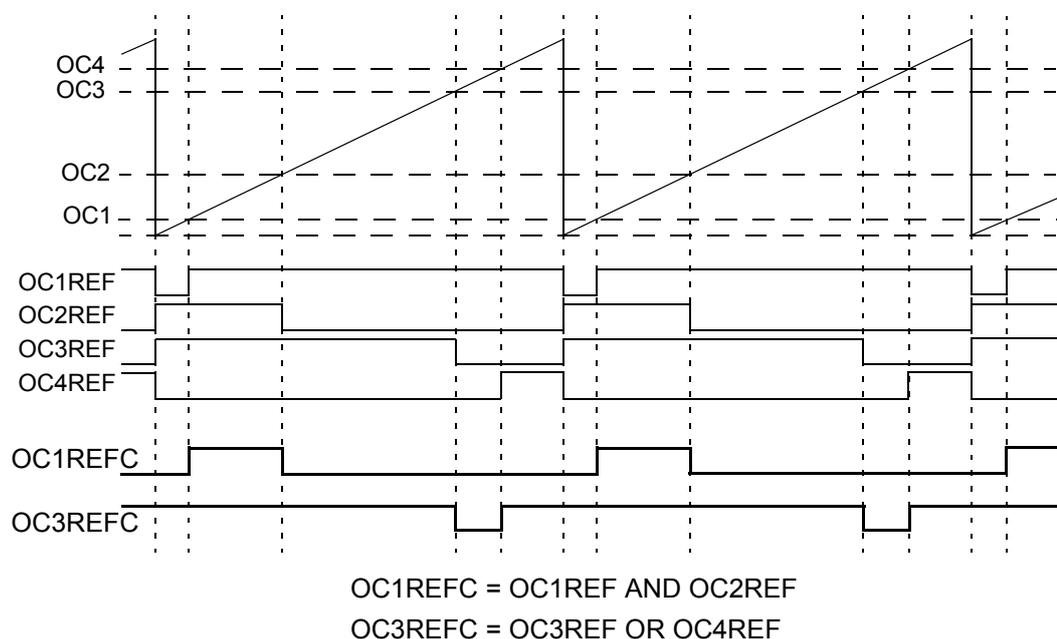
Figure 62. Combined PWM mode on channel 1 and 3 represents an example of signals that can be generated using the asymmetric PWM mode, obtained with the following configuration:
- • Channel 1 is configured in combined PWM mode 2
- • Channel 2 is configured in PWM mode 1
- • Channel 3 is configured in combined PWM mode 2
- • Channel 4 is configured in PWM mode 1.
Figure 62. Combined PWM mode on channel 1 and 3
\(
OC1REFC = OC1REF \text{ AND } OC2REF
\)
\(
OC3REFC = OC3REF \text{ OR } OC4REF
\)
16.3.14 Clearing the OCxREF signal on an external event
The OCxREF signal of a given channel can be cleared when a high level is applied on the ETRF input (OCxCE enable bit in the corresponding TIMx_CCMRx register set to 1) if TIMx_SMCR.OCCS bit is set to 1.
This function can only be used in output compare and PWM modes. It does not work in forced mode.
- 1. The external trigger prescaler should be kept off: bits ETPS[1:0] of the TIMx_SMCR register set to '00'.
- 2. The external clock mode 2 must be disabled: bit ECE of the TIMx_SMCR register set to '0'.
- 3. The external trigger polarity (ETP) and the external trigger filter (ETF) can be configured according to the user needs.
Figure 63. Clearing TIMx OCxREF shows the behavior of the OCxREF signal when the ETRF input becomes high, for both values of the enable bit OCxCE. In this example, the timer TIMx is programmed in PWM mode.
Figure 63. Clearing TIMx OCxREF
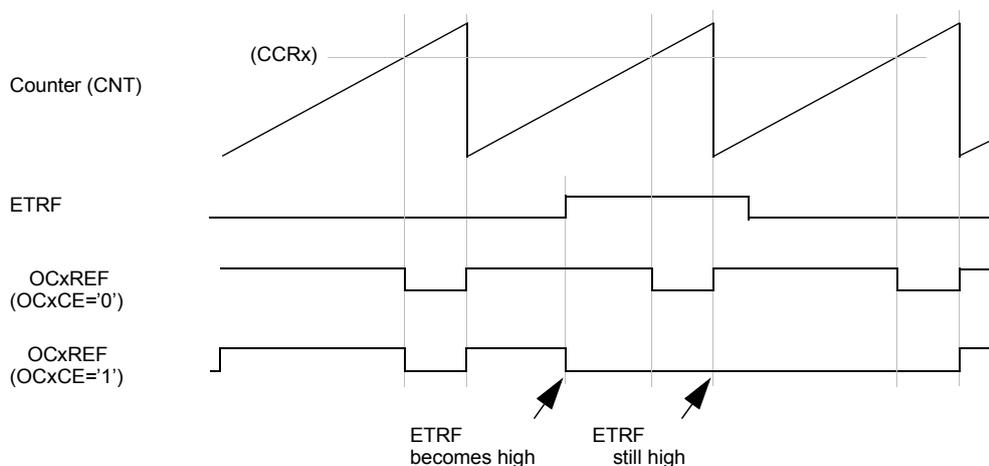
Note: In case of a PWM with a 100% duty cycle (if \( CCRx > ARR \) ), then OCxREF is enabled again at the next counter overflow.
16.3.15 One-pulse mode
One-pulse mode (OPM) is a particular case of the previous modes. It allows the counter to be started in response to a stimulus and to generate a pulse with a programmable length after a programmable delay.
Starting the counter can be controlled through the slave mode controller. Generating the waveform can be done in output compare mode or PWM mode. You select one-pulse mode by setting the OPM bit in the TIMx_CR1 register. This makes the counter stop automatically at the next update event UEV.
A pulse can be correctly generated only if the compare value is different from the counter initial value. Before starting (when the timer is waiting for the trigger), the configuration must be:
- • In up-counting: \( CNT < CCRx \leq ARR \) (in particular, \( 0 < CCRx \) )
- • In down-counting: \( CNT > CCRx \)
Figure 64. Example of one-pulse mode
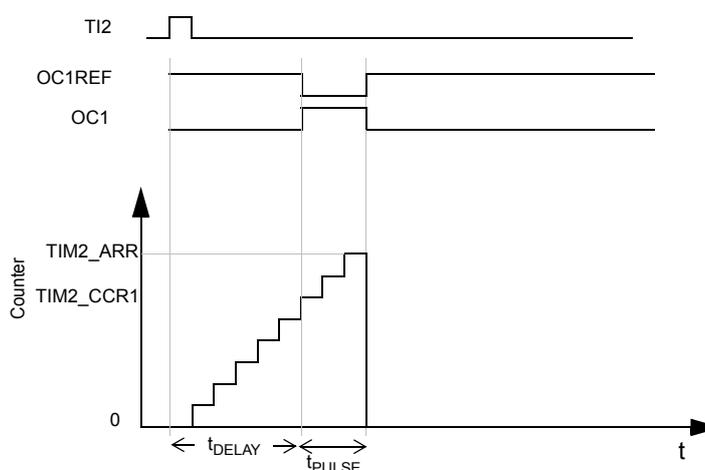
For example you may want to generate a positive pulse on OC1 with a length of \( t_{PULSE} \) and after a delay of \( t_{DELAY} \) as soon as a positive edge is detected on the TI2 input pin.
Let us use TI2FP2 as trigger 1:
- • Map TI2FP2 to TI2 by writing CC2S='01' in the TIMx_CCMR1 register
- • TI2FP2 must detect a rising edge, write CC2P='0' and CC2NP='0' in the TIMx_CCER register
- • Configure TI2FP2 as trigger for the slave mode controller (TRGI) by writing TS='110' in the TIMx_SMCR register
- • TI2FP2 is used to start the counter by writing SMS to '110' in the TIMx_SMCR register (trigger mode).
The OPM waveform is defined by writing the compare registers (taking into account the clock frequency and the counter prescaler).
- • The \( t_{DELAY} \) is defined by the value written in the TIMx_CCR1 register.
- • The \( t_{PULSE} \) is defined by the difference between the auto-reload value and the compare value ( \( TIMx\_ARR - TIMx\_CCR1 \) )
- • Assume that you want to build a waveform with a transition from '0' to '1' when a compare match occurs and a transition from '1' to '0' when the counter reaches the auto-reload value. To do this you enable PWM mode 2 by writing OC1M=111 in the TIMx_CCMR1 register. You can optionally enable the preload registers by writing OC1PE='1' in the TIMx_CCMR1 register and ARPE in the TIMx_CR1 register. In this case you have to write the compare value in the TIMx_CCR1 register, the auto-reload value in the TIMx_ARR register, generate an update by setting the UG bit and wait for the external trigger event on TI2. CC1P is written to '0' in this example.
In our example, the DIR and CMS bits in the TIMx_CR1 register should be low.
You only want 1 pulse (single mode), so you write '1' in the OPM bit in the TIMx_CR1 register to stop the counter at the next update event (when the counter rolls over from the auto-reload value back to 0). When OPM bit in the TIMx_CR1 register is set to '0', so the repetitive mode is selected.
Particular case: OCx fast enable:
In one-pulse mode, the edge detection on TIx input sets the CEN bit which enables the counter. Then the comparison between the counter and the compare value makes the output toggle. Several clock cycles are needed for these operations. The minimum delay t DELAY is the minimum we can get.
If you want to output a waveform with the minimum delay, you can set the OCxFE bit in the TIMx_CCMRx register. Then OCxRef (and OCx) are forced in response to the stimulus, without taking into account the comparison. Its new level is the same as if a compare match had occurred. OCxFE acts only if the channel is configured in PWM1 or PWM2 mode.
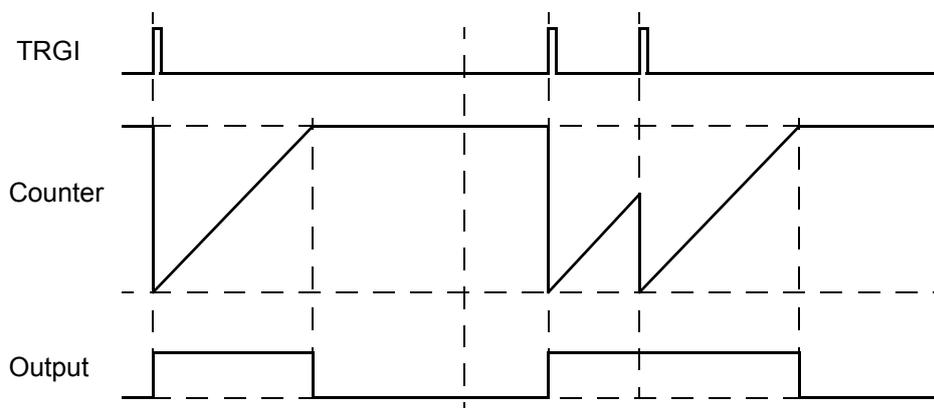
16.3.16 Retriggerable one-pulse mode (OPM)
This mode allows the counter to be started in response to a stimulus and to generate a pulse with a programmable length, but with the following differences with non-retriggerable one-pulse mode described in Section 16.3.15: One-pulse mode :
- • The pulse starts as soon as the trigger occurs (no programmable delay)
- • The pulse is extended if a new trigger occurs before the previous one is completed.
The timer must be in slave mode, with the bits SMS[3:0] = '1000' (combined reset + trigger mode) in the TIMx_SMCR register, and the OCxM[3:0] bits set to '1000' or '1001' for retriggerable OPM mode 1 or 2.
If the timer is configured in up-counting mode, the corresponding CCRx must be set to 0 (the ARR register sets the pulse length). If the timer is configured in down-counting mode, the ARR must be set to 0 (the CCRx register sets the pulse length).
Note: The OCxM[3:0] and SMS[3:0] bit fields are split into two parts for compatibility reasons, the most significant bits are not contiguous with the 3 least significant ones. In retriggerable one-pulse mode, the CCxIF flags are not significant.
Figure 65. Retriggerable one-pulse mode
16.3.17 Encoder interface mode
To select encoder interface mode write SMS='001' in the TIMx_SMCR register if the counter is counting on TI2 edges only, SMS='010' if it is counting on TI1 edges only and SMS='011' if it is counting on both TI1 and TI2 edges.
Select the TI1 and TI2 polarity by programming the CC1P and CC2P bits in the TIMx_CCER register. When needed, you can program the input filter as well. CC1NP and CC2NP must be kept low.
The two inputs TI1 and TI2 are used to interface to a quadrature encoder. Refer to Table 77. Counting direction versus encodersignals .
The counter is clocked by each valid transition on TI1FP1 or TI2FP2 (TI1 and TI2 after input filter and polarity selection, TI1FP1=TI1 if not filtered and not inverted, TI2FP2=TI2 if not filtered and not inverted) assuming that it is enabled (CEN bit in TIMx_CR1 register written to '1'). The sequence of transitions of the two inputs is evaluated and generates count pulses as well as the direction signal. Depending on the sequence the counter counts up or down, the DIR bit in the TIMx_CR1 register is modified by hardware accordingly. The DIR bit is calculated at each transition on any input (TI1 or TI2), whatever the counter is counting on TI1 only, TI2 only or both TI1 and TI2.
Encoder interface mode acts simply as an external clock with the direction selection. This means that the counter just counts continuously between 0 and the auto-reload value in the TIMx_ARR register (0 to ARR or ARR down to 0 depending on the direction). So you must configure TIMx_ARR before starting. In the same way, the capture, compare, prescaler, repetition counter, trigger output features continue to work as normal. Encoder mode and external clock mode 2 are not compatible and must not be selected together.
Note: The prescaler must be set to zero when encoder mode is enabled.
In this mode, the counter is modified automatically following the speed and the direction of the quadrature encoder and its content, therefore, it always represents the encoder position. The count direction corresponds to the rotation direction of the connected sensor. The table below summarizes the possible combinations, assuming TI1 and TI2 do not switch at the same time.
Table 77. Counting direction versus encodersignals
| Active edge | Level on opposite signal (TI1FP1 for TI2, TI2FP2 for TI1) | TI1FP1 signal | TI2FP2 signal | ||
|---|---|---|---|---|---|
| Rising | Falling | Rising | Falling | ||
| Counting on TI1 only | High | Down | Up | No Count | No count |
| Low | Up | Down | No Count | No count | |
| Counting on TI2 only | High | No count | No count | Up | Down |
| Low | No count | No count | Down | Up | |
| Counting on TI1 and TI2 | High | Down | Up | Up | Down |
| Low | Up | Down | Down | Up | |
A quadrature encoder can be connected directly to the MCU without any external interface logic. However, comparators are normally used to convert the encoder differential outputs to digital signals. This greatly increases noise immunity. The third encoder output, which indicates the mechanical zero position, may be connected to an external interrupt input and trigger a counter reset.
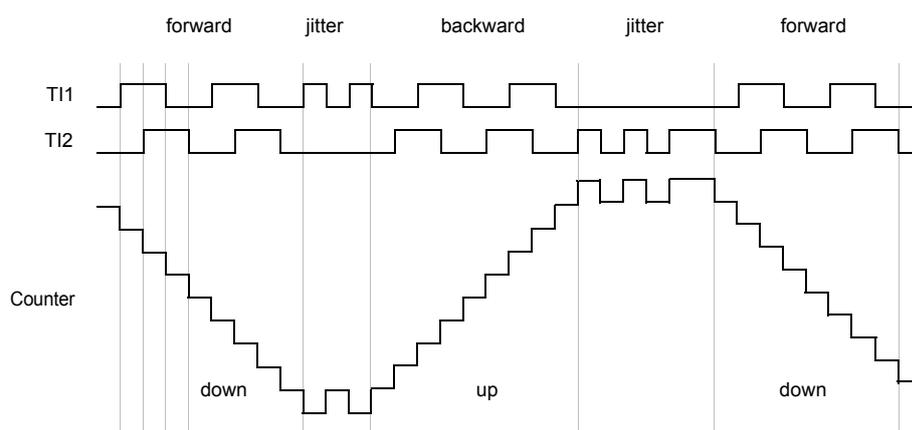
Figure 66. Example of counter operation in encoder interface mode gives an example of counter operation, showing count signal generation and direction control. It also shows how input jitter is compensated where both edges are selected. This might occur if the sensor is positioned near to one of the switching points. For this example we assume that the configuration is the following:
- • CC1S='01' (TIMx_CCMR1 register, TI1FP1 mapped on TI1)
- • CC2S='01' (TIMx_CCMR2 register, TI1FP2 mapped on TI2)
- • CC1P='0' and CC1NP='0' (TIMx_CCER register, TI1FP1 non-inverted, TI1FP1=TI1)
- • CC2P='0' and CC2NP='0' (TIMx_CCER register, TI1FP2 non-inverted, TI1FP2= TI2)
- • SMS='011' (TIMx_SMCR register, both inputs are active on both rising and falling edges)
- • CEN='1' (TIMx_CR1 register, counter enabled).
Figure 66. Example of counter operation in encoder interface mode
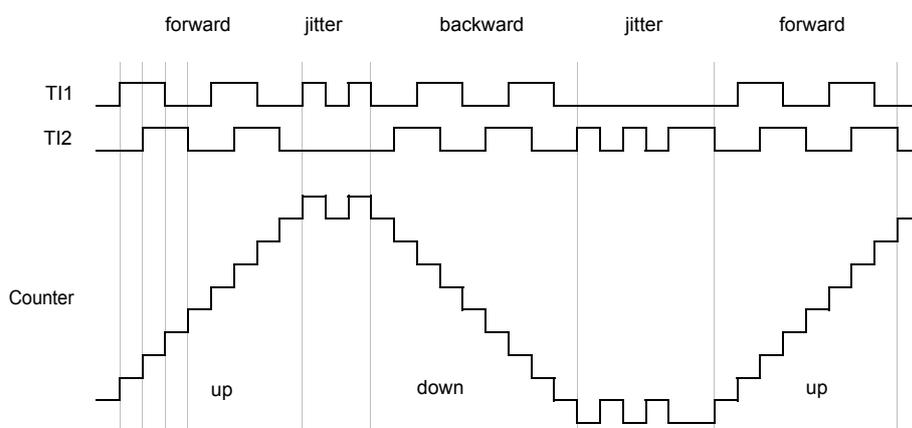
Figure 67. Example of encoder interface mode with TI1FP1 polarity inverted gives an example of counter behavior when TI1FP1 polarity is inverted (same configuration as above except CC1P='1').
Figure 67. Example of encoder interface mode with TI1FP1 polarity inverted
The timer, when configured in encoder interface mode, provides some information on the sensor current position. You can obtain the dynamic information (speed, acceleration, deceleration) by measuring the period between two encoder events using a second timer configured in capture mode (not available in the STM32WB05xZ device). The output of the encoder, which indicates the mechanical zero, can be used for this purpose. Depending on the time between two events, the counter can also be read at regular times. You can do this by latching the counter value into a third input capture register if available (then the capture signal must be periodic and can be generated by another timer), when available it is also possible to read its value through a DMA request generated by a real-time clock.
The IUFREMAP bit in the TIMx_CR1 register forces a continuous copy of the update interrupt flag (UIF) into the timer counter register bit 31 (TIMxCNT[31]). This allows both the counter value and a potential roll-over condition signaled by the UIFCPY flag to be read in an atomic way. It eases the calculation of angular speed by avoiding race conditions caused, for instance, by a processing shared between a background task (counter reading) and an interrupt (update interrupt).
There is no latency between the UIF and UIFCPY flag assertions.
In 32-bit timer implementations, when the IUFREMAP bit is set, bit 31 of the counter is overwritten by the UIFCPY flag upon read access (the counter most significant bit is only accessible in write mode).
16.3.18 UIF bit remapping
The IUFREMAP bit in the TIMx_CR1 register forces a continuous copy of the update interrupt flag UIF into the timer counter register bit 31 (TIMxCNT[31]). This allows both the counter value and a potential roll-over condition signaled by the UIFCPY flag to be read in an atomic way. In particular cases, it can ease the calculations by avoiding race conditions, caused for instance by a processing shared between a background task (counter reading) and an interrupt (update interrupt). There is no latency between the UIF and UIFCPY flags assertion.
16.3.19 Timer input XOR function
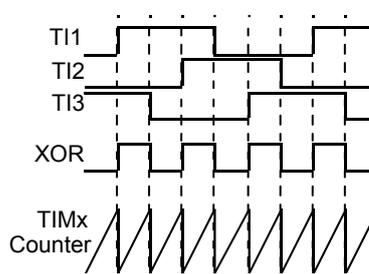
The TI1S bit in the TIMx_CR2 register, allows the input filter of channel 1 to be connected to the output of an XOR gate, combining the two input pins TIMx_CH1 and TIMx_CH2. The XOR output can be used with all the timer input functions such as trigger or input capture. It is convenient to measure the interval between edges on two input signals, as per figure below.
Figure 68. Measuring time interval between edges on 3 signals
16.3.20 DMA burst mode
The TIMx timers have the capability to generate multiple DMA requests on a single event. The main purpose is to be able to re-program several timer registers multiple times without software overhead, but it can also be used to read several registers in a row, at regular intervals.
The DMA controller destination is unique and must point to the virtual register TIMx_DMAR. On a given timer event, the timer launches a sequence of DMA requests (burst). Each write into the TIMx_DMAR register is actually redirected to one of the timer registers.
The DBL[4:0] bits in the TIMx_DCR register set the DMA burst length. The timer recognizes a burst transfer when a read or a write access is done to the TIMx_DMAR address), i.e. the number of transfers (either in half-words or in bytes).
The DBA[4:0] bits in the TIMx_DCR registers define the DMA base address for DMA transfers (when read/write access are done through the TIMx_DMAR address). DBA is defined as an offset starting from the address of the TIMx_CR1 register.
Example:
00000: TIMx_CR1,
00001: TIMx_CR2,
For example, the timer DMA burst feature could be used to update the contents of the CCRx registers (x = 2, 3, 4) on an update event, with the DMA transferring half words into the CCRx registers.
This is done in the following steps:
- 1. Configure the corresponding DMA channel as follows:
- a. DMA channel peripheral address is the DMAR register address
- b. DMA channel memory address is the address of the buffer in the RAM containing the data to be transferred by DMA into the CCRx registers
- c. Number of data to transfer = 3 (See note below)
- d. Circular mode disabled
- 2. Configure the DCR register by configuring the DBA and DBL bit fields as follows:
- a. DBL = 3 transfers, DBA = 0xE
- 3. Enable the TIMx update DMA request (set the UDE bit in the DIER register)
- 4. Enable TIMx
- 5. Enable the DMA channel
This example is for the case where every CCRx register is to be updated once. If every CCRx register is to be updated twice for example, the number of data to transfer should be 6. Let's take the example of a buffer in the RAM containing data1, data2, data3, data4, data5 and data6. The data is transferred to the CCRx registers as follows: on the first update DMA request, data1 is transferred to CCR2, data2 is transferred to CCR3, data3 is transferred to CCR4 and on the second update DMA request, data4 is transferred to CCR2, data5 is transferred to CCR3 and data6 is transferred to CCR4.
16.4 TIM2 registers
16.4.1 TIM2 control register 1 (TIMx_CR1)
Address offset: 0x00
Reset value: 0x0000
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Res. | Res. | Res. | Res. | UIFREMAP | Res. | CKD[1:0] | ARPE | CMS[1:0] | DIR | OPM | URS | UDIS | CEN | ||
| rw | rw | rw | rw | rw | rw | rw | rw | rw | |||||||
| Bits 15:12 | Reserved, always read as 0. |
| Bit 11 | UIFREMAP:
UIF status bit remapping. 0: No remapping. UIF status bit is not copied to TIMx_CNT register bit 31. 1: Remapping enabled. UIF status bit is copied to TIMx_CNT register bit 31. |
| Bits 10 | Reserved, always read as 0. |
| Bits 9:8 | CKD[1:0]:
Clock division. This bit-field indicates the division ratio between the timer clock (CK_INT) frequency and the deadtime and sampling clock (tDTS) used by the deadtime generators and the digital filters (ETR,TIx). 00: \( t_{DTS}=t_{CK\_INT} \) 01: \( t_{DTS}=2*t_{CK\_INT} \) 10: \( t_{DTS}=4*t_{CK\_INT} \) 11: Reserved, do not program this value |
| Bit 7 | ARPE:
Auto-reload preload enable. 0: TIMx_ARR register is not buffered 1: TIMx_ARR register is buffered |
| Bits 6:5 | CMS[1:0]:
Center-aligned mode selection. 00: Edge-aligned mode. The counter counts up or down depending on the direction bit (DIR). 01: Center-aligned mode 1. The counter counts up and down alternatively. Output compare interrupt flags of channels configured in output (CCxS=00 in TIMx_CCMRx register) are set only when the counter is counting down. 10: Center-aligned mode 2. The counter counts up and down alternatively. Output compare interrupt flags of channels configured in output (CCxS=00 in TIMx_CCMRx register) are set only when the counter is counting up. 11: Center-aligned mode 3. The counter counts up and down alternatively. Output compare interrupt flags of channels configured in output (CCxS=00 in TIMx_CCMRx register) are set both when the counter is counting up or down. Note: It is not allowed to switch from edge-aligned mode to center-aligned mode as long as the counter is enabled (CEN=1). |
| Bit 4 | DIR:
Direction 0: Counter used as up-counter 1: Counter used as down-counter Note: This bit is read only when the timer is configured in center-aligned mode or encoder mode. |
| Bit 3 | OPM:
One-pulse mode. 0: Counter is not stopped at update event 1: Counter stops counting to the next update event (clearing the bit CEN) |
| Bit 2 | URS:
Update request source. This bit is set and cleared by software to select the UEV event sources. 0: Any of the following events generates an update interrupt if enabled. These events can be:
|
1: Only counter overflow/underflow generates an update interrupt if enabled | |
| Bit 1 | UDIS: Update disable. This bit is set and cleared by software to enable/disable UEV event generation. 0: UEV enabled. The update (UEV) event is generated by one of the following events:
1: UEV disabled. The update event is not generated, shadow registers keep their value (ARR, PSC, CCRx). However the counter and the prescaler are reinitialized if the UG bit is set or if a hardware reset is received from the slave mode controller. |
| Bit 0 | CEN: Counter enable. 0: Counter disabled 1: Counter enabled Note: The external clock, gated mode and encoder mode can work only if the CEN bit has been previously set by software. However trigger mode can set the CEN bit automatically by hardware. |
16.4.2 TIM2 control register 2 (TIMx_CR2)
Address offset: 0x04
Reset value: 0x0000
| 31 | 30 | 29 | 28 | 27 | 26 | 25 | 24 | 23 | 22 | 21 | 20 | 19 | 18 | 17 | 16 |
| Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. |
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | TI1S | Res. | Res. | Res. | CCDS | Res. | Res. | Res. |
| rw | rw |
| Bits 31:8 | Reserved, always read as 0. |
| Bit 7 | TI1S:
TI1 selection. 0: The TIMx_CH1 pin is connected to TI1 input 1: The TIMx_CH1, CH2 and CH3 pins are connected to the TI1 input (XOR combination) |
| Bits 6:4 | Reserved, always read as 0. |
| Bit 3 | CCDS:
Capture/compare DMA selection 0: CCx DMA request sent when CCx event occurs 1: CCx DMA requests sent when update event occurs |
| Bit 2:0 | Reserved, always read as 0. |
16.4.3 TIM2 slave mode control register (TIMx_SMCR)
Address offset: 0x08
Reset value: 0x0000
| 31 | 30 | 29 | 28 | 27 | 26 | 25 | 24 | 23 | 22 | 21 | 20 | 19 | 18 | 17 | 16 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | TS[4:3] | Res. | Res. | Res. | SMS[3] | |
| rw | rw | rw | |||||||||||||
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| ETP | ECE | ETPS[1:0] | ETF[3:0] | Res. | TS[2:0] | OCCS | SMS[2:0] | ||||||||
| rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | |
| Bit 31:22 | Reserved, always read as 0. |
| 21:20 | TS[4:3] |
| Bit 16 | SMS[3]: Slave mode selection - bit 3. Refer to SMS description - bits 2:0. |
| Bit 15 | ETP:
External trigger polarity. This bit selects whether ETR or \( \overline{ETR} \) is used for trigger operations. 0: ETR is non-inverted, active at high level or rising edge 1: ETR is inverted, active at low level or falling edge |
| Bit 14 | ECE:
External clock enable. This bit enables external clock mode 2. 0: External clock mode 2 disabled 1: External clock mode 2 enabled. The counter is clocked by any active edge on the ETRF signal. Note: 1: Setting the ECE bit has the same effect as selecting external clock mode 1 with TRGI connected to ETRF (SMS=111 and TS=111). 2: It is possible to simultaneously use external clock mode 2 with the following slave modes: reset mode, gated mode and trigger mode. Nevertheless, TRGI must not be connected to ETRF in this case (TS bits must not be 111). 3: If external clock mode 1 and external clock mode 2 are enabled at the same time, the external clock input is ETRF. |
| Bits 13:12 | ETPS[1:0]:
External trigger prescaler. External trigger signal ETRP frequency must be at most 1/4 of TIMxCLK frequency. A prescaler can be enabled to reduce ETRP frequency. It is useful when inputting fast external clocks. 00: Prescaler OFF 01: ETRP frequency divided by 2 10: ETRP frequency divided by 4 11: ETRP frequency divided by 8 |
| Bits 11:8 | ETF[3:0]:
External trigger filter. This bit-field then defines the frequency used to sample ETRP signal and the length of the digital filter applied to ETRP. The digital filter is made of an event counter in which N events are needed to validate a transition on the output: 0000: No filter, sampling is done at f DTS 0001: \( f_{SAMPLING}=f_{CK\_INT} \) , N=2 0010: \( f_{SAMPLING}=f_{CK\_INT} \) , N=4 0011: \( f_{SAMPLING}=f_{CK\_INT} \) , N=8 0100: \( f_{SAMPLING}=f_{DTS}/2 \) , N=6 0101: \( f_{SAMPLING}=f_{DTS}/2 \) , N=8 0110: \( f_{SAMPLING}=f_{DTS}/4 \) , N=6 0111: \( f_{SAMPLING}=f_{DTS}/4 \) , N=8 |
| 1000:
\(
f_{SAMPLING}=f_{DTS}/8
\)
, N=6 1001: \( f_{SAMPLING}=f_{DTS}/8 \) , N=8 1010: \( f_{SAMPLING}=f_{DTS}/16 \) , N=5 1011: \( f_{SAMPLING}=f_{DTS}/16 \) , N=6 1100: \( f_{SAMPLING}=f_{DTS}/16 \) , N=8 1101: \( f_{SAMPLING}=f_{DTS}/32 \) , N=5 1110: \( f_{SAMPLING}=f_{DTS}/32 \) , N=6 1111: \( f_{SAMPLING}=f_{DTS}/32 \) , N=8 | |
| Bit 7 | Reserved, always read as 0. |
| Bits 6:4 | TS[2:0]:
Trigger selection. This bit-field selects the trigger input to be used to synchronize the counter. 00100: TI1 Edge Detector (TI1F_ED) 00101: Filtered Timer Input 1 (TI1FP1) 00110: Filtered Timer Input 2 (TI2FP2) 00111: External Trigger input (ETRF) Others: Reserved Note: These bits must be changed only when they are not used (e.g. when SMS=000) to avoid wrong edge detections at the transition. |
| Bit 3 | OCCS:
OCREF clear selection. This bit is used to select the OCREF clear source. 0: OCREF_CLR_INT is connected to the OCREF_CLR input (stuck at 0 so no effect) 1: OCREF_CLR_INT is connected to ETRF |
| Bits 2:0 | SMS:
Slave mode selection. When external signals are selected the active edge of the trigger signal (TRGI) is linked to the polarity selected on the external input (see Input Control register and Control Register description). 0000: Slave mode disabled - if CEN = '1' then the prescaler is clocked directly by the internal clock 0001: Encoder mode 1 - counter counts up/down on TI2FP2 edge depending on TI1FP1 level 0010: Encoder mode 2 - counter counts up/down on TI1FP1 edge depending on TI2FP2 level 0011: Encoder mode 3 - counter counts up/down on both TI1FP1 and TI2FP2 edges depending on the level of the other input 0100: Reset mode - rising edge of the selected trigger input (TRGI) reinitializes the counter and generates an update of the registers 0101: Gated mode - the counter clock is enabled when the trigger input (TRGI) is high. The counter stops (but is not reset) as soon as the trigger becomes low. Both start and stop of the counter are controlled. 0110: Trigger mode - the counter starts at a rising edge of the trigger TRGI (but it is not reset). Only the start of the counter is controlled. 0111: External clock mode 1 - rising edges of the selected trigger (TRGI) clock the counter. 1000: Combined reset + trigger mode - Rising edge of the selected trigger input (TRGI) reinitializes the counter, generates an update of the registers and starts the counter. Others: Reserved Note: The gated mode must not be used if TI1F_ED is selected as the trigger input (TS='100'). Indeed, TI1F_ED outputs 1 pulse for each transition on TI1F, whereas the gated mode checks the level of the trigger signal. |
16.4.4 TIM2 DMA/interrupt enable register (TIMx_DIER)
Address offset: 0x0C
Reset value: 0x0000
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Res. | Res. | Res. | CC4DE | CC3DE | CC2DE | CC1DE | UDE | Res. | TIE | Res. | CC4IE | CC3IE | CC2IE | CC1IE | UIE |
| rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw |
| Bits 15:13 | Reserved, always read as 0. |
| Bit 12 | CC4DE
: Capture/compare 4 DMA request enable 0: CC4 DMA request disabled 1: CC4 DMA request enabled |
| Bit 11 | CC3DE
: Capture/compare 3 DMA request enable 0: CC3 DMA request disabled 1: CC3 DMA request enabled |
| Bit 10 | CC2DE
: Capture/compare 2 DMA request enable 0: CC2 DMA request disabled 1: CC2 DMA request enabled |
| Bit 9 | CC1DE
: Capture/compare 1 DMA request enable 0: CC1 DMA request disabled 1: CC1 DMA request enabled |
| Bit 8 | UDE
: Update DMA request enable 0: Update DMA request disabled 1: Update DMA request enabled |
| Bit 7 | Reserved, always read as 0. |
| Bit 6 | TIE
: Trigger interrupt enable. 0: Trigger interrupt disabled 1: Trigger interrupt enabled |
| Bit 5 | Reserved, always read as 0. |
| Bit 4 | CC4IE
: Capture/compare 4 interrupt enable. 0: CC4 interrupt disabled 1: CC4 interrupt enabled |
| Bit 3 | CC3IE
: Capture/compare 3 interrupt enable. 0: CC3 interrupt disabled 1: CC3 interrupt enabled |
| Bit 2 | CC2IE
: Capture/compare 2 interrupt enable. 0: CC2 interrupt disabled 1: CC2 interrupt enabled |
| Bit 1 | CC1IE
: Capture/compare 1 interrupt enable. 0: CC1 interrupt disabled 1: CC1 interrupt enabled |
| Bit 0 | UIE
: Update interrupt enable. 0: Update interrupt disabled |
| 1: Update interrupt enabled |
16.4.5 TIM2 status register (TIMx_SR)
Address offset: 0x10
Reset value: 0x0000
| 31 | 30 | 29 | 28 | 27 | 26 | 25 | 24 | 23 | 22 | 21 | 20 | 19 | 18 | 17 | 16 |
| Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. |
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| Res. | Res. | Res. | CC4OF | CC3OF | CC2OF | CC1OF | Res. | Res. | TIF | Res. | CC4IF | CC3IF | CC2IF | CC1IF | UIF |
| rc_w0 | rc_w0 | rc_w0 | rc_w0 | rc_w0 | rc_w0 | rc_w0 | rc_w0 | rc_w0 | rc_w0 |
| Bits 31:13 | Reserved, always read as 0. |
| Bit 12 | CC4OF : Capture/compare 4 overcapture flag. Refer to CC1OF description. |
| Bit 11 | CC3OF : Capture/compare 3 overcapture flag. Refer to CC1OF description. |
| Bit 10 | CC2OF : Capture/compare 2 overcapture flag. Refer to CC1OF description. |
| Bit 9 | CC1OF
: Capture/compare 1 overcapture flag. This flag is set by hardware only when the corresponding channel is configured in input capture mode. It is cleared by software by writing it to '0'. 0: No overcapture has been detected 1: The counter value has been captured in TIMx_CCR1 register while CC1IF flag was already set |
| Bit 8:7 | Reserved, always read as 0. |
| Bit 6 | TIF
: Trigger interrupt flag. This flag is set by hardware on trigger event (active edge detected on TRGI input when the slave mode controller is enabled in all modes but gated mode. It is set when the counter starts or stops when gated mode is selected. It is cleared by software. 0: No trigger event occurred 1: Trigger interrupt pending |
| Bit 5 | Reserved, always read as 0. |
| Bit 4 | CC4IF : Capture/compare 4 interrupt flag. Refer to CC1IF description. |
| Bit 3 | CC3IF : Capture/compare 3 interrupt flag. Refer to CC1IF description. |
| Bit 2 | CC2IF : Capture/compare 2 interrupt flag. Refer to CC1IF description. |
| Bit 1 | CC1IF
: Capture/compare 1 interrupt flag. If channel CC1 is configured as output: This flag is set by hardware when the counter matches the compare value, with some exception in center-aligned mode (refer to the CMS bits in the TIMx_CR1 register description). It is cleared by software. 0: No match 1: The content of the counter TIMx_CNT matches the content of the TIMx_CCR1 register. When the contents of TIMx_CCR1 are greater than the contents of TIMx_ARR, the CC1IF bit goes high on the counter overflow (in up-counting and up/down-counting modes) or underflow (in down-counting mode). If channel CC1 is configured as input: This bit is set by hardware on a capture. It is cleared by software or by reading the TIMx_CCR1 register. 0: No input capture occurred 1: The counter value has been captured in TIMx_CCR1 register (an edge has been detected on IC1 which matches the selected polarity) |
| Bit 0 | UIF
: Update interrupt flag. This bit is set by hardware on an update event. It is cleared by software. |
| 0: No update occurred |
1: Update interrupt pending. This bit is set by hardware when the registers are updated:
|
16.4.6 TIM2 event generation register (TIMx_EGR)
Address offset: 0x14
Reset value: 0x0000
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | TG | Res. | CC4G | CC3G | CC2G | CC1G | UG |
| w | w | w | w | w | w |
| Bits 15:7 | Reserved, always read as 0. |
| Bit 6 | TG:
Trigger generation. This bit is set by software in order to generate an event, it is automatically cleared by hardware. 0: No action 1: The TIF flag is set in TIMx_SR register. Related interrupt can occur if enabled. |
| Bit 5 | Reserved, always read as 0. |
| Bit 4 | CC4G: Capture/compare 4 generation. Refer to CC1G description. |
| Bit 3 | CC3G: Capture/compare 3 generation. Refer to CC1G description. |
| Bit 2 | CC2G: Capture/compare 2 generation. Refer to CC1G description. |
| Bit 1 | CC1G:
Capture/compare 1 generation. This bit is set by software in order to generate an event, it is automatically cleared by hardware. 0: No action 1: A capture/compare event is generated on channel 1: If channel CC1 is configured as output: CC1IF flag is set, corresponding interrupt is sent if enabled. If channel CC1 is configured as input: The current value of the counter is captured in TIMx_CCR1 register. The CC1IF flag is set, the corresponding interrupt is sent if enabled. The CC1OF flag is set if the CC1IF flag was already high. |
| Bit 0 | UG:
Update generation. This bit can be set by software, it is automatically cleared by hardware. 0: No action 1: Reinitialize the counter and generates an update of the registers. Note that the prescaler counter is cleared too (anyway the prescaler ratio is not affected). The counter is cleared if the center-aligned mode is selected or if DIR=0 (up-counting), else it takes the auto-reload value (TIMx_ARR) if DIR=1 (down-counting). |
16.4.7 TIM2 capture/compare mode register 1 (TIMx_CCMR1)
Address offset: 0x18
Reset value: 0x0000
The channels can be used in input (capture mode) or in output (compare mode). The direction of a channel is defined by configuring the corresponding CCxS bits. All the other bits of this register have a different function in input and in output mode. For a given bit, OCxx describes its function when the channel is configured in output, ICxx describes its function when the channel is configured in input. So you must take care that the same bit can have a different meaning for the input stage and for the output stage.
| 31 | 30 | 29 | 28 | 27 | 26 | 25 | 24 | 23 | 22 | 21 | 20 | 19 | 18 | 17 | 16 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Res. | Res. | Res. | Res. | Res. | Res. | Res. | OC2M[3] | Res. | Res. | Res. | Res. | Res. | Res. | Res. | OC1M[3] |
| Res. | Res. | ||||||||||||||
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| OC2 CE | OC2M[2:0] | OC2 PE | OC2 FE | CC2S[1:0] | OC1 CE | OC1M[2:0] | OC1 PE | OC1 FE | CC1S[1:0] | ||||||
| IC2F[3:0] | IC2PSC[1:0] | IC1F[3:0] | IC1PSC[1:0] | ||||||||||||
| rW | rW | rW | rW | rW | rW | rW | rW | rW | rW | rW | rW | rW | rW | rW | rW |
Output compare mode:
| Bits 31:25 | Reserved, always read as 0. |
| Bit 24 | OC2M[3]: Output compare 2 mode - bit 3 |
| Bits 23:17 | Reserved, always read as 0. |
| Bits 16 | OC1M[3]: Output compare 1 mode - bit 3. Refer to OC1M description on bits 6:4. |
| Bit 15 | OC2CE: Output compare 2 clear enable. |
| Bits 14:12 | OC2M[2:0]: Output compare 2 mode. |
| Bit 11 | OC2PE: Output compare 2 preload enable. |
| Bit 10 | OC2FE: Output compare 2 fast enable. |
| Bits 9:8 | CC2S[1:0]:
Capture/compare 2 selection. This bit-field defines the direction of the channel (input/output) as well as the used input. 00: CC2 channel is configured as output 01: CC2 channel is configured as input, IC2 is mapped on TI2 10: CC2 channel is configured as input, IC2 is mapped on TI1 11: CC2 channel is configured as input, IC2 is mapped on TRC. This mode is working only if an internal trigger input is selected through the TS bit (TIMx_SMCR register). Note: CC2S bits are writable only when the channel is OFF (CC2E = '0' in TIMx_CCER). |
| Bit 7 | OC1CE:
Output compare 1 clear enable. 0: OC1 Ref is not affected by the ETRF input 1: OC1 Ref is cleared as soon as a high level is detected on ETRF input |
| Bits 6:4 | OC1M:
Output compare 1 mode. These bits define the behavior of the output reference signal OC1REF from which OC1 and OC1N are derived. OC1REF is active high whereas OC1 and OC1N active level depends on CC1P and CC1NP bits. 0000: Frozen - the comparison between the output compare register TIMx_CCR1 and the counter TIMx_CNT has no effect on the outputs (this mode is used to generate a timing base). 0001: Set channel 1 to active level on match. OC1REF signal is forced high when the counter TIMx_CNT matches the capture/compare register 1 (TIMx_CCR1). |
0010: Set channel 1 to inactive level on match. OC1REF signal is forced low when the counter TIMx_CNT matches the capture/compare register 1 (TIMx_CCR1). 0011: Toggle - OC1REF toggles when TIMx_CNT=TIMx_CCR1. 0100: Force inactive level - OC1REF is forced low. 0101: Force active level - OC1REF is forced high. 0110: PWM mode 1 - in up-counting, channel 1 is active as long as TIMx_CNT<TIMx_CCR1, otherwise inactive. In down-counting, channel 1 is inactive (OC1REF='0') as long as TIMx_CNT>TIMx_CCR1, otherwise active (OC1REF='1'). 0111: PWM mode 2 - in up-counting, channel 1 is inactive as long as TIMx_CNT<TIMx_CCR1, otherwise active. In down-counting, channel 1 is active as long as TIMx_CNT>TIMx_CCR1, otherwise inactive. 1000: Retriggerable OPM mode 1 - in up-counting mode, the channel is active until a trigger event is detected (on TRGI signal). Then, a comparison is performed as in PWM mode 1 and the channels become active again at the next update. In down-counting mode, the channel is inactive until a trigger event is detected (on TRGI signal). Then, a comparison is performed as in PWM mode 1 and the channels become inactive again at the next update. 1001: Retriggerable OPM mode 2 - in up-counting mode, the channel is inactive until a trigger event is detected (on TRGI signal). Then, a comparison is performed as in PWM mode 2 and the channels become inactive again at the next update. In down-counting mode, the channel is active until a trigger event is detected (on TRGI signal). Then, a comparison is performed as in PWM mode 1 and the channels become active again at the next update. 1010: Reserved 1011: Reserved 1100: Combined PWM mode 1 - OC1REF has the same behavior as in PWM mode 1. OC1REFC is the logical OR between OC1REF and OC2REF. 1101: Combined PWM mode 2 - OC1REF has the same behavior as in PWM mode 2. OC1REFC is the logical AND between OC1REF and OC2REF. 1110: Asymmetric PWM mode 1 - OC1REF has the same behavior as in PWM mode 1. OC1REFC outputs OC1REF when the counter is counting up, OC2REF when it is counting down. 1111: Asymmetric PWM mode 2 - OC1REF has the same behavior as in PWM mode 2. OC1REFC outputs OC1REF when the counter is counting up, OC2REF when it is counting down. Note 1: These bits cannot be modified as long as LOCK level 3 has been programmed (LOCK bits in TIMx_BDTR register) and CC1S='00' (the channel is configured in output). Note 2: In PWM mode, the OCREF level changes only when the result of the comparison changes or when the output compare mode switches from "frozen" mode to "PWM" mode. | |
| Bit 3 | OC1PE : Output compare 1 preload enable 0: Preload register on TIMx_CCR1 disabled. TIMx_CCR1 can be written at anytime, the new value is taken into account immediately. 1: Preload register on TIMx_CCR1 enabled. Read/write operations access the preload register. TIMx_CCR1 preload value is loaded in the active register at each update event. Note 1: These bits cannot be modified as long as LOCK level 3 has been programmed (LOCK bits in TIMx_BDTR register) and CC1S='00' (the channel is configured in output). Note 2: The PWM mode can be used without validating the preload register only in one-pulse mode (OPM bit set in TIMx_CR1 register). Otherwise the behavior is not guaranteed. |
| Bit 2 | OC1FE : Output compare 1 fast enable This bit is used to accelerate the effect of an event on the trigger in input on the CC output. 0: CC1 behaves normally depending on counter and CCR1 values even when the trigger is ON. The minimum delay to activate CC1 output when an edge occurs on the trigger input is 5 clock cycles. 1: An active edge on the trigger input acts like a compare match on CC1 output. Then, OC is set to the compare level independently from the result of the comparison. Delay to sample the trigger input and to activate CC1 output is reduced to 3 clock cycles. OCFE acts only if the channel is configured in PWM1 or PWM2 mode. |
| Bits 1:0 | CC1S : Capture/compare 1 selection. This bit-field defines the direction of the channel (input/output) as well as the used input. 00: CC1 channel is configured as output 01: CC1 channel is configured as input, IC1 is mapped on TI1 10: CC1 channel is configured as input, IC1 is mapped on TI2 |
11: CC1 channel is configured as input, IC1 is mapped on TRC. This mode is working only if an internal trigger input is selected through TS bit (TIMx_SMCR register). Note: CC1S bits are writable only when the channel is OFF (CC1E = '0' in TIMx_CCER). |
Input capture mode
| Bits 31:16 | Reserved, always read as 0. |
| Bits 15:12 | IC2F : Input capture 2 filter. |
| Bits 11:10 | IC2PSC[1:0] : Input capture 2 prescaler. |
| Bits 9:8 | CC2S : Capture/compare 2 selection. This bit-field defines the direction of the channel (input/output) as well as the used input. 00: CC2 channel is configured as output 01: CC2 channel is configured as input, IC2 is mapped on TI2 10: CC2 channel is configured as input, IC2 is mapped on TI1 11: CC2 channel is configured as input, IC2 is mapped on TRC. This mode is working only if an internal trigger input is selected through TS bit (TIMx_SMCR register). Note: CC2S bits are writable only when the channel is OFF (CC2E = '0' in TIMx_CCER). |
| Bits 7:4 | IC1F[3:0] : Input capture 1 filter. This bit-field defines the frequency used to sample TI1 input and the length of the digital filter applied to TI1. The digital filter is made of an event counter in which N events are needed to validate a transition on the output: 0000: No filter, sampling is done at \( f_{DTS} \) 0001: \( f_{SAMPLING}=f_{CK\_INT} \) , N=2 0010: \( f_{SAMPLING}=f_{CK\_INT} \) , N=4 0011: \( f_{SAMPLING}=f_{CK\_INT} \) , N=8 0100: \( f_{SAMPLING}=f_{DTS}/2 \) , N=6 0101: \( f_{SAMPLING}=f_{DTS}/2 \) , N=8 0110: \( f_{SAMPLING}=f_{DTS}/4 \) , N=6 0111: \( f_{SAMPLING}=f_{DTS}/4 \) , N=8 1000: \( f_{SAMPLING}=f_{DTS}/8 \) , N=6 1001: \( f_{SAMPLING}=f_{DTS}/8 \) , N=8 1010: \( f_{SAMPLING}=f_{DTS}/16 \) , N=5 1011: \( f_{SAMPLING}=f_{DTS}/16 \) , N=6 1100: \( f_{SAMPLING}=f_{DTS}/16 \) , N=8 1101: \( f_{SAMPLING}=f_{DTS}/32 \) , N=5 1110: \( f_{SAMPLING}=f_{DTS}/32 \) , N=6 1111: \( f_{SAMPLING}=f_{DTS}/32 \) , N=8 |
| Bits 3:2 | IC1PSC : Input capture 1 prescaler. This bit-field defines the ratio of the prescaler acting on CC1 input (IC1). The prescaler is reset as soon as CC1E='0' (TIMx_CCER register). 00: No prescaler, capture is done each time an edge is detected on the capture input 01: Capture is done once every 2 events 10: Capture is done once every 4 events 11: Capture is done once every 8 events |
| Bits 1:0 | CC1S : Capture/compare 1 selection |
This bit-field defines the direction of the channel (input/output) as well as the used input.
00: CC1 channel is configured as output
01: CC1 channel is configured as input, IC1 is mapped on TI1
10: CC1 channel is configured as input, IC1 is mapped on TI2
11: CC1 channel is configured as input, IC1 is mapped on TRC. This mode is working only if an internal trigger input is selected through TS bit (TIMx_SMCR register).
Note: CC1S bits are writable only when the channel is OFF (CC1E = '0' in TIMx_CCER).
16.4.8 TIM2 capture/compare mode register 2 (TIMx_CCMR2)
Address offset: 0x1C
Reset value: 0x0000
Refer to .
| 31 | 30 | 29 | 28 | 27 | 26 | 25 | 24 | 23 | 22 | 21 | 20 | 19 | 18 | 17 | 16 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Res. | Res. | Res. | Res. | Res. | Res. | Res. | OC4M[3] | Res. | Res. | Res. | Res. | Res. | Res. | Res. | OC3M[3] |
| Res. | Res. | ||||||||||||||
| rw | rw | ||||||||||||||
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| OC4 CE | OC4M[2:0] | OC4 PE | OC4 FE | CC4S[1:0] | OC3CE | OC3M[2:0] | OC3 PE | OC3 FE | CC3S[1:0] | ||||||
| IC4F[3:0] | IC4PSC[1:0] | IC3F[3:0] | IC3PSC[1:0] | ||||||||||||
| rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw |
Output compare mode
| Bits 31:25 | Reserved, always read as 0. |
| Bit 24 | OC4M[3] : Output compare 4 mode - bit 3 |
| Bits 23:17 | Reserved, always read as 0. |
| Bit 16 | OC3M[3] : Output compare 3 mode - bit 3. |
| Bit 15 | OC4CE : Output compare 4 clear enable. |
| Bits 14:12 | OC4M : Output compare 4 mode. |
| Bit 11 | OC4PE : Output compare 4 preload enable. |
| Bit 10 | OC4FE : Output compare 4 fast enable. |
| Bits 9:8 | CC4S
: Capture/compare 4 selection. This bit-field defines the direction of the channel (input/output) as well as the used input. 00: CC4 channel is configured as output 01: CC4 channel is configured as input, IC4 is mapped on TI4 10: CC4 channel is configured as input, IC4 is mapped on TI3 11: CC4 channel is configured as input, IC4 is mapped on TRC. This mode is working only if an internal trigger input is selected through TS bit (TIMx_SMCR register). Note: CC4S bits are writable only when the channel is OFF (CC4E = '0' in TIMx_CCER). |
| Bit 7 | OC3CE : Output compare 3 clear enable. |
| Bits 6:4 | OC3M : Output compare 3 mode. |
| Bit 3 | OC3PE : Output compare 3 preload enable. |
| Bit 2 | OC3FE : Output compare 3 fast enable. |
| Bits 1:0 | CC3S
: Capture/compare 3 selection. This bit-field defines the direction of the channel (input/output) as well as the used input. 00: CC3 channel is configured as output 01: CC3 channel is configured as input, IC3 is mapped on TI3 10: CC3 channel is configured as input, IC3 is mapped on TI4 11: CC3 channel is configured as input, IC3 is mapped on TRC. This mode is working only if an internal trigger input is selected through TS bit (TIMx_SMCR register). Note: CC3S bits are writable only when the channel is OFF (CC3E = '0' in TIMx_CCER). |
Input capture mode
| Bits 31:16 | Reserved, always read as 0. |
| Bits 15:12 | IC4F : Input capture 4 filter. |
| Bits 11:10 | IC4PSC : Input capture 4 prescaler. |
| Bits 9:8 | CC4S
: Capture/compare 4 selection. This bit-field defines the direction of the channel (input/output) as well as the used input. 00: CC4 channel is configured as output 01: CC4 channel is configured as input, IC4 is mapped on TI4 10: CC4 channel is configured as input, IC4 is mapped on TI3 11: CC4 channel is configured as input, IC4 is mapped on TRC. This mode is working only if an internal trigger input is selected through TS bit (TIMx_SMCR register). Note: CC4S bits are writable only when the channel is OFF (CC4E = '0' in TIMx_CCER). |
| Bits 7:4 | IC3F : Input capture 3 filter. |
| Bits 3:2 | IC3PSC : Input capture 3 prescaler. |
| Bits 1:0 | CC3S
: Capture/compare 3 selection. This bit-field defines the direction of the channel (input/output) as well as the used input. 00: CC3 channel is configured as output 01: CC3 channel is configured as input, IC3 is mapped on TI3 10: CC3 channel is configured as input, IC3 is mapped on TI4 11: CC3 channel is configured as input, IC3 is mapped on TRC. This mode is working only if an internal trigger input is selected through TS bit (TIMx_SMCR register). Note: CC3S bits are writable only when the channel is OFF (CC3E = '0' in TIMx_CCER). |
16.4.9 TIM2 capture/compare enable register (TIMx_CCER)
Address offset: 0x20
Reset value: 0x0000
| 31 | 30 | 29 | 28 | 27 | 26 | 25 | 24 | 23 | 22 | 21 | 20 | 19 | 18 | 17 | 16 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. |
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| CC4NP | Res. | CC4P | CC4E | CC3NP | Res. | CC3P | CC3E | CC2NP | Res. | CC2P | CC2E | CC1NP | Res. | CC1P | CC1E |
| rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw |
| Bits 31:16 | Reserved, always read as 0. |
| Bit 15 | CC4NP : Capture/compare 4 output complementary polarity. Refer to the CC1P bitfield description. |
| Bit 14 | Reserved, always read as 0. |
| Bit 13 | CC4P : Capture/compare 4 output polarity. Refer to the CC1P bitfield description . |
| Bit 12 | CC4E : Capture/compare 4 output enable. Refer to the CC1E bitfield description . |
| Bit 11 | CC3NP : Capture/compare 3 complementary output polarity. Refer to the CC1P bitfield description. |
| Bit 10 | Reserved, always read as 0. |
| Bit 9 | CC3P : Capture/compare 3 output polarity. Refer to the CC1P bitfield description . |
| Bit 8 | CC3E : Capture/compare 3 output enable. Refer to the CC1E bitfield description . |
| Bit 7 | CC2NP : Capture/compare 2 complementary output polarity. Refer to the CC1P bitfield description .Reserved, always read as 0. |
| Bit 6 | Reserved, always read as 0. |
| Bit 5 | CC2P : Capture/compare 2 output polarity. Refer to the CC1P bitfield description . |
| Bit 4 | CC2E : Capture/compare 2 output enable. Refer to the CC1E bitfield description . |
| Bit 3 | CC1NP : Capture/compare 1 complementary output polarity. Refer to the CC1P bitfield description . |
| Bit 2 | Reserved, always read as 0. |
| Bit 1 | CC1P : Capture/compare 1 output polarity. CC1 channel configured as output: 0: OC1 active high 1: OC1 active low CC1 channel configured as input: CC1NP/CC1P bits select the active polarity of TI1FP1 and TI2FP1 for trigger or capture operations. 00: Non-inverted/rising edge. The circuit is sensitive to TIxFP1 rising edge (capture or trigger operations in reset, external clock or trigger mode), TIxFP1 is not inverted (trigger operation in gated mode or encoder mode). 01: Inverted/falling edge. The circuit is sensitive to TIxFP1 falling edge (capture or trigger operations in reset, external clock or trigger mode), TIxFP1 is inverted (trigger operation in gated mode or encoder mode). 10: Reserved, do not use this configuration. 11: Non-inverted/both edges/ The circuit is sensitive to both TIxFP1 rising and falling edges (captureor trigger operations in reset, external clock or trigger mode), TIxFP1 is not inverted (trigger operation in gated mode). This configuration must not be used in encoder mode. Note: This bit is not writable as soon as LOCK level 2 or 3 has been programmed (LOCK bits in TIMx_BDTR register). Note: On channels having a complementary output, this bit is preloaded. |
| Bit 0 | CC1E : Capture/compare 1 output enable. CC1 channel configured as output: 0: Off - OC1 is not active. OC1 level is then function of MOE, OSSI, OSSR, OIS1, OIS1N and CC1NE bits. |
1: On - OC1 signal is output on the corresponding output pin depending on MOE, OSSI, OSSR, OIS1, OIS1N and CC1NE bits CC1 channel configured as input: This bit determines if a capture of the counter value can actually be done into the input capture/compare register 1 (TIMx_CCR1) or not. 0: Capture disabled. 1: Capture enabled. Note: On channels having a complementary output, this bit is preloaded. |
Table 78. Output control bits for OCx channels
| CCxE bit | OCx output state |
|---|---|
| 0 | Output disabled (not driven by the timer: Hi-Z) OCx=0 |
| 1 | OCxREF + polarity OCx=OCxREF xor CCxP |
16.4.10 TIM2 counter (TIMx_CNT)
Address offset: 0x24
Reset value: 0x0000
| 31 | 30 | 29 | 28 | 27 | 26 | 25 | 24 | 23 | 22 | 21 | 20 | 19 | 18 | 17 | 16 |
| UIFCPY | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. |
| r |
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| CNT[15:0] | |||||||||||||||
| rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw |
| Bit 31 | UIFCPY:
UIF copy This bit is a read-only copy of the UIF bit of the TIMx_ISR register. If the UIFREMAP bit in the TIMx_CR1 is reset, bit 31 is reserved and read at 0. |
| Bits 30:16 | Reserved, always read as 0. |
| Bits 15:0 | CNT[15:0]: Counter value |
16.4.11 TIM2 prescaler (TIMx_PSC)
Address offset: 0x28
Reset value: 0x0000
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| PSC[15:0] | |||||||||||||||
| rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw |
| Bits 15:0 | PSC[15:0]:
Prescaler value The counter clock frequency (CK_CNT) is equal to fCK_PSC / (PSC[15:0] + 1). PSC contains the value to be loaded in the active prescaler register at each update event (including when the counter is cleared through UG bit of TIMx_EGR register or through trigger controller when configured in “reset mode”). |
16.4.12 TIM2 auto-reload register (TIMx_ARR)
Address offset: 0x2C
Reset value: 0xFFFF
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ARR[15:0] | |||||||||||||||
| rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw |
| Bits 15:0 | ARR[15:0]: Prescaler value. ARR is the value to be loaded in the actual auto-reload register. Refer to Section 16.3.1: Time-base unit for more details about ARR update and behavior. The counter is blocked while the auto-reload value is null. |
16.4.13 TIM2 repetition counter register (TIMx_RCR)
Address offset: 0x30
Reset value: 0x0000
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|
| REP[15:0] | |||||||
| rw | rw | rw | rw | rw | rw | rw | rw |
| Bits 7:0 | REP[7:0]: Repetition counter value. These bits allow the user to set-up the update rate of the compare registers (i.e. periodic transfers from preload to active registers) when preload registers are enabled, as well as the update interrupt generation rate, if this interrupt is enabled. Each time the REP_CNT related down-counter reaches zero, an update event is generated and it restarts counting from REP value. As REP_CNT is reloaded with REP value only at the repetition update event U_RC, any write to the TIMx_RCR register is not taken into account until the next repetition update event. It means in PWM mode (REP+1) corresponds to: |
16.4.14 TIM2 capture/compare register 1 (TIMx_CCR1)
Address offset: 0x34
Reset value: 0x0000
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| CCR1[15:0] | |||||||||||||||
| rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw |
| Bits 15:0 | CCR1[15:0]: Capture/compare 1 value. If channel CC1 is configured as output: CCR1 is the value to be loaded in the actual capture/compare 1 register (preload value). It is loaded permanently if the preload feature is not selected in the TIMx_CCMR1 register (bit OC1PE). Otherwise the preload value is copied in the active capture/compare 1 register when an update event occurs. The active capture/compare register contains the value to be compared to the counter TIMx_CNT and signaled on OC1 output. If channel CC1 is configured as input: CCR1 is the counter value transferred by the last input capture 1 event (IC1). |
16.4.15 TIM2 capture/compare register 2 (TIMx_CCR2)
Address offset: 0x38
Reset value: 0x0000
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| CCR2[15:0] | |||||||||||||||
| rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw |
| Bits 15:0 | CCR2[15:0]: Capture/compare 2 value If channel CC2 is configured as output: CCR2 is the value to be loaded in the actual capture/compare 2 register (preload value). It is loaded permanently if the preload feature is not selected in the TIMx_CCMR2 register (bit OC2PE). Otherwise the preload value is copied in the active capture/compare 2 register when an update event occurs. The active capture/compare register contains the value to be compared to the counter TIMx_CNT and signalled on OC2 output. If channel CC2 is configured as input: CCR2 is the counter value transferred by the last input capture 2 event (IC2). |
16.4.16 TIM2 capture/compare register 3 (TIMx_CCR3)
Address offset: 0x3C
Reset value: 0x0000
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| CCR3[15:0] | |||||||||||||||
| rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw |
| Bits 15:0 | CCR3[15:0]: Capture/compare value If channel CC3 is configured as output: CCR3 is the value to be loaded in the actual capture/compare 3 register (preload value). It is loaded permanently if the preload feature is not selected in the TIMx_CCMR3 register (bit OC3PE). Otherwise the preload value is copied in the active capture/compare 3 register when an update event occurs. The active capture/compare register contains the value to be compared to the counter TIMx_CNT and signalled on OC3 output. If channel CC3 is configured as input: CCR3 is the counter value transferred by the last input capture 3 event (IC3). |
16.4.17 TIM2 capture/compare register 4 (TIMx_CCR4)
Address offset: 0x40
Reset value: 0x0000
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| CCR4[15:0] | |||||||||||||||
| rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw |
| Bits 15:0 | CCR4[15:0]: Capture/compare value If channel CC4 is configured as output: CCR4 is the value to be loaded in the actual capture/compare 4 register (preload value). The active capture/compare register contains the value to be compared to the counter TIMx_CNT and signaled on OC4 output. If channel CC4 is configured as input: CCR4 is the counter value transferred by the last input capture 4 event (IC4). |
16.4.18 TIM2 DMA control register (TIM2_DCR)
Address offset: 0x2C
Reset value: 0x0000
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Res. | Res. | Res. | DBL[4:0] | Res. | Res. | Res. | DBA[4:0] | ||||||||
| rW | rW | rW | rW | rW | rW | rW | rW | rW | rW | ||||||
| Bits 15:13 | Reserved, must be kept at reset value |
| Bits 12:8 | DBL[12:8]: DMA burst length This 5-bit field defines the length of DMA transfers (the timer recognizes a burst transfer when a read or a write access is done to the TIM2_DMAR address), i.e. the number of transfers. Transfers can be in half-words or in bytes (see example below).□ 00000: 1 transfer |
| Bits 7:5 | Reserved, must be kept at reset value |
| Bits 4:0 | DBA[4:0] DMA base address This 5-bit field defines the base-address for DMA transfers (when read/write access are done through the TIM2_DMAR address). DBA is defined as an offset starting from the address of the TIM2_CR1 register.□ Example: |
16.4.19 TIM2 DMA address for full transfer (TIM2_DMAR)
Address offset: 0x4C
Reset value: 0x0000
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| DMAB[15:0] | |||||||||||||||
| rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw |
| Bits 15:0 | DMAB[15:0]: DMA register for burst accesses A read or write operation to the DMAR register accesses the register located at the address (TIM2_CR1 address) + (DBA + DMA index) x 4 where TIM2_CR1 address is the address of the control register 1, DBA is the DMA base address configured in TIM2_DCR register, DMA index is automatically controlled by the DMA transfer, and ranges from 0 to DBL (DBL configured in TIM2_DCR). |
16.4.20 TIM2 input selection register (TIM2_TISEL)
Address offset: 0x68
Reset value: 0x0000
| 31 | 30 | 29 | 28 | 27 | 26 | 25 | 24 | 23 | 22 | 21 | 20 | 19 | 18 | 17 | 16 |
| Res. | Res. | Res. | Res. | TI4SEL[3:0] | Res. | Res. | Res. | Res. | TI3SEL[3:0] | ||||||
| rw | rw | rw | rw | rw | rw | rw | rw | ||||||||
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| Res. | Res. | Res. | Res. | TI2SEL[3:0] | Res. | Res. | Res. | Res. | TI1SEL[3:0] | ||||||
| rw | rw | rw | rw | rw | rw | rw | rw | ||||||||
| Bit 31:28 | Reserved, must be kept at reset value. |
| 27:24 | TI4SEL[3:0]: selects TI4[0] to TI4[15] input 0000: TIMx_CH4 input Others: Reserved |
| Bit 15:12 | Reserved, must be kept at reset value. |
| Bit 11:8 | TI2SEL[3:0]: selects TI2[0] to TI2[15] input 0000: TIMx_CH2 input Others: Reserved |
| Bit 7:4 | Reserved, must be kept at reset value. |
| Bits 3:0 | TI1SEL[3:0]: selects TI1[0] to TI1[15] input 0000: TIMx_CH1 input Others: Reserved |
16.4.21 TIM2 register map
TIM2 registers are mapped as 16-bit addressable registers as described in the table below:
Table 79. TIM2 register map and reset values
| Offset | Register | 31 | 30 | 29 | 28 | 27 | 26 | 25 | 24 | 23 | 22 | 21 | 20 | 19 | 18 | 17 | 16 | 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0x00 | TIMx_CR1 | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | UIFREMAP | Res. | CKD [1:0] | ARPE | OMS [1:0] | DIR | OPM | URS | UDIS | CEN | |||
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |||||||||||||||||||||||
| 0x04 | TIMx_CR2 | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | TI1S | Res | Res | Res | CCDS | Res. | Res | Res. | |
| Reset value | 0 | 0 | 0 | 0 | ||||||||||||||||||||||||||||||
| 0x08 | TIMx_SMCR | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | SMS[3] | ETP | ECE | ETPS [1:0] | ETF[3:0] | Res | TS[2:0] | OCCS | SMS[2:0] | |||||||||
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||||||||||||||||||
| 0x0C | TIMx_DIER | Res | Res | Res | Res | Res | Res | Res | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | TIE | Res. | CC4IE | CC3IE | CC2IE | CC1IE | UIE | ||
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | ||||||||||||||||||||||||||||
| 0x10 | TIMx_SR | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res. | Res | Res | Res | Res | CC4OF | CC3OF | CC2OF | CC1OF | Res. | TIF | Res. | CC4IF | CC3IF | CC2IF | CC1IF | UIF | ||
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||||||||||||||||||||||||
| 0x14 | TIMx_EGR | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res. | TG | Res. | CC4G | CC3G | CC2G | CC1G | UG | ||
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | ||||||||||||||||||||||||||||
| 0x18 | TIMx_CCMR1 Output Compare mode | Res | Res | Res | Res | Res | Res | Res | OC2M[3] | Res | Res | Res | Res | Res | Res | Res | OC1M[3] | OC2CE | OC2M [2:0] | OC2PE | OC2FE | CC2S [1:0] | OC1CE | OC1M [2:0] | OC1PE | OC1FE | CC1S [1:0] | |||||||
| Resetvalue | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |

| Offset | Register | 31 | 30 | 29 | 28 | 27 | 26 | 25 | 24 | 23 | 22 | 21 | 20 | 19 | 18 | 17 | 16 | 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 | ||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0x18 | TIMx_CCMR1 Input Capture mode | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | IC2F[3:0] | IC2 | PSC [1:0] | CC2S [1:0] | IC1F[3:0] | IC1 | PSC [1:0] | CC1S [1:0] | ||||||||||
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |||||||||||||||||||
| 0x1C | TIMx_CCMR2 Output Compare mode | Res | Res | Res | Res | Res | Res | Res | OC4M[3] | Res | Res | Res | Res | Res | Res | Res | OC3M[3] | OC4CE | OC4M [2:0] | OC4PE | OC4FE | CC4S [1:0] | OC3CE | OC3M [2:0] | OC3PE | OC3FE | CC3S [1:0] | ||||||||
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |||||||||||||||||
| Offset | Register | 31 | 30 | 29 | 28 | 27 | 26 | 25 | 24 | 23 | 22 | 21 | 20 | 19 | 18 | 17 | 16 | 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0x1C | TIMx_CCMR2 Input capture mode | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | IC4F[3:0] | IC4 | PSC [1:0] | CC4S [1:0] | IC3F[3:0] | IC3 | PSC [1:0] | CC3S [1:0] | ||||||||
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||||||||||||||||
| 0x20 | TIMx_CCER | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res. | Res. | Res | Res | Res. | Res. | Res. | CC4NP | CC4P | CC4E | CC3NP | Res. | CC3P | CC3E | CC2NP | Res. | CC2P | CC2E | CC1NP | Res. | CC1P | CC1E |
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |||||||||||||||||||||
| 0x24 | TIMx_CNT | UIFCPY | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | CNT[15:0] | |||||||||||||||
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||||||||||||||||
| 0x28 | TIMx_PSC | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | PSC[15:0] | |||||||||||||||
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |||||||||||||||||
| 0x2C | TIMx_ARR | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | ARR[15:0] | |||||||||||||||
| Reset value | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | |||||||||||||||||
| 0x30 | TIMx_RCR | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | REP[7:0] | |||||||
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |||||||||||||||||
| 0x34 | TIMx_CCR1 | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | CCR1[15:0] | |||||||||||||||
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |||||||||||||||||
| 0x38 | TIMx_CCR2 | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | CCR2[15:0] | |||||||||||||||
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |||||||||||||||||
| 0x3C | TIMx_CCR3 | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | CCR3[15:0] | |||||||||||||||
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |||||||||||||||||
| 0x40 | TIMx_CCR4 | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | Res | CCR4[15:0] | |||||||||||||||
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |||||||||||||||||
| 0x48 | TIMx_DCR | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | DBL[4:0] | Res. | Res. | Res. | DBA[4:0] | |||||||||
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||||||||||||||||||||||||
| 0x4C | TIMx_DMAR | Res | Res | Res | Res | Res | Res | Res | Res. | Res | Res | Res | Res | Res | Res | Res | Res. | DMAB[15:0] | |||||||||||||||
| Offset | Register | 31 | 30 | 29 | 28 | 27 | 26 | 25 | 24 | 23 | 22 | 21 | 20 | 19 | 18 | 17 | 16 | 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0x68 | TIMx_TISEL | Res. | Res. | Res. | Res. | TI4SEL[3:0] | Res. | Res. | Res. | Res. | Res. | TI3SEL[3:0] | Res. | Res. | Res. | TI2SEL[3:0] | Res. | Res. | Res. | Res. | TI1SEL[3:0] | ||||||||||||
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |||||||||||||||||
Refer to Section 2.2.2: Memory map and register boundary addresses for the register boundary addresses.
