39. Universal synchronous/asynchronous receiver transmitter (USART/UART)
39.1 Introduction
The USART offers a flexible means to perform full-duplex data exchange with external equipments requiring an industry standard NRZ asynchronous serial data format. A very wide range of baud rates can be achieved through a fractional baud rate generator.
The USART supports both synchronous one-way and half-duplex single-wire communications, as well as LIN (local interconnection network), smartcard protocol, IrDA (infrared data association) SIR ENDEC specifications, and modem operations (CTS/RTS). Multiprocessor communications are also supported.
High-speed data communications are possible by using the DMA (direct memory access) for multibuffer configuration.
39.2 USART main features
- • Full-duplex asynchronous communication
- • NRZ standard format (mark/space)
- • Configurable oversampling method by 16 or 8 to achieve the best compromise between speed and clock tolerance
- • Baud rate generator systems
- • Two internal FIFOs for transmit and receive data
Each FIFO can be enabled/disabled by software and come with a status flag. - • A common programmable transmit and receive baud rate
- • Dual clock domain with dedicated kernel clock for peripherals independent from PCLK
- • Auto baud rate detection
- • Programmable data word length (7, 8 or 9 bits)
- • Programmable data order with MSB-first or LSB-first shifting
- • Configurable stop bits (1 or 2 stop bits)
- • Synchronous master/slave mode and clock output/input for synchronous communications
- • SPI slave transmission underrun error flag
- • Single-wire half-duplex communications
- • Continuous communications using DMA
- • Received/transmitted bytes are buffered in reserved SRAM using centralized DMA.
- • Separate enable bits for transmitter and receiver
- • Separate signal polarity control for transmission and reception
- • Swappable Tx/Rx pin configuration
- • Hardware flow control for modem and RS-485 transceiver
- • Communication control/error detection flags
- • Parity control:
- – Transmits parity bit
- – Checks parity of received data byte
- • Interrupt sources with flags
- • Multiprocessor communications: wake-up from mute mode by idle line detection or address mark detection
- • Wake-up from Stop mode
- • Autonomous functionality in Stop mode
39.3 USART extended features
- • LIN master synchronous break send capability and LIN slave break detection capability
- – 13-bit break generation and 10/11 bit break detection when USART is hardware configured for LIN
- • IrDA SIR encoder decoder supporting 3/16 bit duration for normal mode
- • Smartcard mode
- – Supports the T = 0 and T = 1 asynchronous protocols for smartcards as defined in the ISO/IEC 7816-3 standard
- – 0.5 and 1.5 stop bits for smartcard operation
- • Support for Modbus communication
- – Timeout feature
- – CR/LF character recognition
39.4 USART implementation
The following tables describe the USART implementation. LPUART is included for comparison.
Table 373. Instance implementation
| Instance | Feature set |
|---|---|
| USART1 | Full |
| USART2 | Full |
| LPUART1 | Low-power |
Table 374. USART/LPUART features
| Modes/features (1) | Full feature set | Basic feature set | Low-power feature set |
|---|---|---|---|
| Hardware flow control for modem | X | X | X |
| Continuous communication using DMA | X | X | X |
| Multiprocessor communication | X | X | X |
| Synchronous mode (master/slave) | X | - | - |
| Smartcard mode | X | - | - |
| Single-wire half-duplex communication | X | X | X |
| IrDA SIR ENDEC block | X | X | - |
Table 374. USART/LPUART features (continued)
| Modes/features (1) | Full feature set | Basic feature set | Low-power feature set |
|---|---|---|---|
| LIN mode | X | X | - |
| Dual clock domain | X | X | X |
| Receiver timeout interrupt | X | X | - |
| Modbus communication | X | X | - |
| Auto baud rate detection | X | X | - |
| Driver enable | X | X | X |
| USART data length | 7, 8 and 9 bits | ||
| Tx/Rx FIFO | X | X | X |
| Tx/Rx FIFO size (bytes) | 8 | ||
| Wake-up from low-power mode | X (2) | X (2) | X (2) |
| Autonomous mode | X | X | X |
1. "X" = supported, "-" = not supported.
2. Wake-up supported from Stop mode.
39.5 USART functional description
39.5.1 USART block diagram
Figure 418. USART block diagram
![Figure 418. USART block diagram. The diagram shows the internal architecture of a USART. On the left, a 32-bit APB bus connects to various registers: USART_TDR, USART_RDR, USART_RTOR, USART_GTPR, USART_BRR, and USART_PRES. Above these are control registers: USART_CR1, USART_ISR, USART_CR2, USART_CR3, USART_RQR, and USART_ICR, managed by a COM Controller. External signals usart_wkup, usart_it, usart_tx_dma, and usart_rx_dma connect to an IRQ Interface and a DMA Interface. The USART is divided into two clock domains: usart_pclk (for the APB interface and COM Controller) and usart_ker_ck (for the TX/RX shift registers and baudrate generator). The TX path consists of USART_TDR, a TxFIFO, a TX Shift Reg, and a TX driver connected to the TX pin. The RX path consists of an RX driver connected to the RX pin, an RX Shift Reg, a RxFIFO, and USART_RDR. A Baudrate generator & oversampling block is connected to the shift registers and USART_PRES. Hardware flow control (CTS/NSS, RTS/DE) is connected to the TX and RX lines. Pins shown on the right are usart_trg[15:0], CK, CTS/NSS, RTS/DE, TX, and RX. The diagram is labeled MSV40854V5.](/RM0493-STM32WBA5/db9482c3f0474bd77ca0021feb0576ee_img.jpg)
39.5.2 USART pins and internal signals
Description of USART input/output pins
- • USART bidirectional communications
USART bidirectional communications require a minimum of two pins: Receive Data In (RX) and Transmit Data Out (TX):- –
RX
(Receive Data Input)
RX is the serial data input. Oversampling techniques are used for data recovery. They discriminate between valid incoming data and noise. - –
TX
(Transmit Data Output)
When the transmitter is disabled, the output pin returns to its I/O port configuration. When the transmitter is enabled and no data needs to be transmitted, the TX pin is High. In single-wire and smartcard modes, this I/O is used to transmit and receive data.
- –
RX
(Receive Data Input)
- • RS232 hardware flow control mode
The following pins are required in RS232 hardware flow control mode:
- – CTS (Clear To Send)
When driven high, this signal blocks the data transmission at the end of the current transfer.
- – RTS (Request To Send)
When it is low, this signal indicates that the USART is ready to receive data.
- • RS485 hardware control mode
The DE (Driver Enable) pin is required in RS485 hardware control mode. This signal activates the transmission mode of the external transceiver.
- • Synchronous SPI master/slave mode and smartcard mode
The following pins are required in synchronous master/slave mode and smartcard mode:
- – CK
This pin acts as clock output in synchronous SPI master and smartcard modes. It acts as clock input in synchronous SPI slave mode.
In synchronous master mode, this pin outputs the transmitter data clock for synchronous transmission corresponding to SPI master mode (no clock pulses on start bit and stop bit, and a software option to send a clock pulse on the last data bit). In parallel, data can be received synchronously on RX pin. This mechanism can be used to control peripherals featuring shift registers (such as LCD drivers). The clock phase and polarity are software programmable.
In smartcard mode, CK output provides the clock to the smartcard.
- – NSS
This pin acts as Slave Select input in synchronous slave mode.
Refer to Table 375 and Table 376 for the list of USART input/output pins and internal signals.
Table 375. USART/UART input/output pins
| Pin name | Signal type | Description |
|---|---|---|
| USART_RX/UART_RX | Input | Serial data receive input |
| USART_TX/UART_TX | Output | Transmit data output |
| USART_CTS/UART_CTS | Input | Clear to send |
| USART_RTS/UART_RTS | Output | Request to send |
| USART_DE (1) /UART_DE (2) | Output | Driver enable |
| USART_CK | Output | Clock output in synchronous master and smartcard modes. |
| USART_NSS (3) | Input | Slave select input in synchronous slave mode. |
1. USART_DE and USART_RTS share the same pin.
2. UART_DE and UART_RTS share the same pin.
3. USART_NSS and USART_CTS share the same pin.
Description of USART input/output signals
Table 376. USART internal input/output signals
| Signal name | Signal type | Description |
|---|---|---|
| usart_pclk | Input | APB clock |
| usart_ker_ck | Input | USART kernel clock |
| usart_wkup | Output | USART provides a wake-up interrupt |
| usart_it | Output | USART global interrupt |
| usart_tx_dma | Input/output | USART transmit DMA request |
| usart_rx_dma | Input/output | USART receive DMA request |
| usart_trg[15:0] | Input | USART triggers. |
Description of USART interconnections
Table 377. USART interconnection (USART1/2)
| Signal name | Source |
|---|---|
| usart_trg0 | gpdma1_ch0_tc |
| usart_trg1 | gpdma1_ch1_tc |
| usart_trg2 | gpdma1_ch2_tc |
| usart_trg3 | gpdma1_ch3_tc |
| usart_trg4 | exti6 |
| usart_trg5 | exti9 |
| usart_trg6 | lptim1_ch1 |
| usart_trg7 | lptim2_ch1 |
| usart_trg8 | comp1_out (1) |
| usart_trg9 | comp2_out (1) |
| usart_trg10 | rtc_alra_trg |
| usart_trg11 | rtc_wut_trg |
| usart_trg12 | - |
| usart_trg13 | - |
| usart_trg14 | - |
| usart_trg15 | - |
- 1. Only available for STM32WBA54xx and STM32WBA55xx devices.
39.5.3 USART clocks
The simplified block diagram given in Section 39.5.1: USART block diagram shows two fully-independent clock domains:
- • The
usart_pclk
clock domain
The usart_pclk clock signal feeds the peripheral bus interface. It must be active when accesses to the USART registers are required. - • The
usart_ker_ck
kernel clock domain.
The usart_ker_ck is the USART clock source. It is independent from usart_pclk and delivered by the RCC. The USART registers can consequently be written/read even when the usart_ker_ck clock is stopped.
When the dual clock domain feature is not supported, the usart_ker_ck clock is the same as the usart_pclk clock.
There is no constraint between usart_pclk and usart_ker_ck : usart_ker_ck can be faster or slower than usart_pclk . The only limitation is the software ability to manage the communication fast enough.
When the USART operates in SPI slave mode, it handles data flow using the serial interface clock derived from the external CK signal provided by the external master SPI device. The usart_ker_ck clock must be at least 3 times faster than the clock on the CK input.
39.5.4 USART character description
The word length can be set to 7, 8 or 9 bits, by programming the M bits (M0: bit 12 and M1: bit 28) in the USART_CR1 register (see Figure 419 ):
- • 7-bit character length: M[1:0] = 10
- • 8-bit character length: M[1:0] = 00
- • 9-bit character length: M[1:0] = 01
Note: In 7-bit data length mode, the smartcard mode, LIN master mode and Auto baud rate (0x7F and 0x55 frames detection) are not supported.
By default, the signal (TX or RX) is in low state during the start bit. It is in high state during the stop bit.
These values can be inverted, separately for each signal, through polarity configuration control.
An Idle character is interpreted as an entire frame of “1”s (the number of “1”s includes the number of stop bits).
A Break character is interpreted on receiving “0”s for a frame period. At the end of the break frame, the transmitter inserts 2 stop bits.
Transmission and reception are driven by a common baud rate generator. The transmission and reception clock are generated when the enable bit is set for the transmitter and receiver, respectively.
A detailed description of each block is given below.
Figure 419. Word length programming
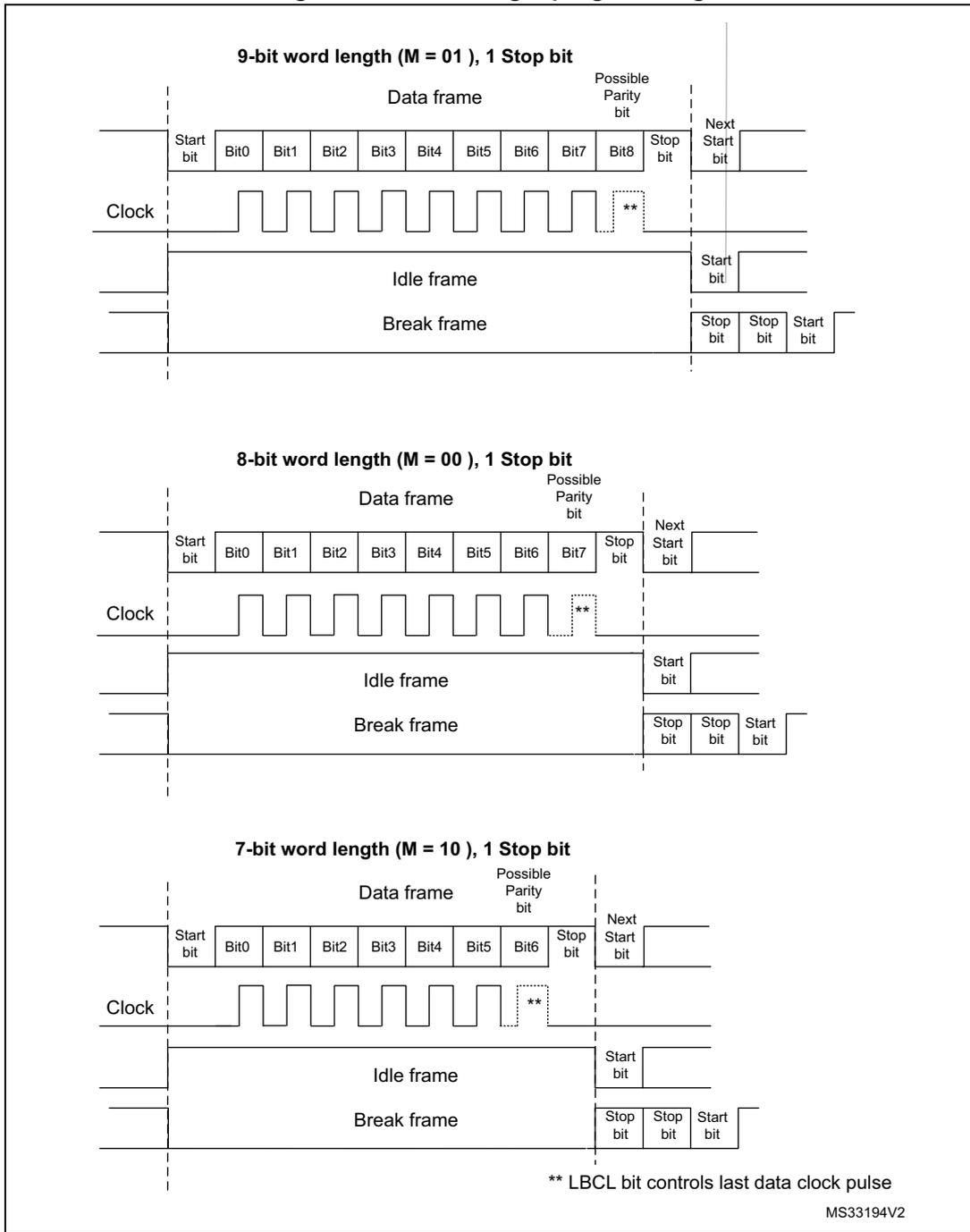
9-bit word length (M = 01), 1 Stop bit
Data frame:
Start bit | Bit0 | Bit1 | Bit2 | Bit3 | Bit4 | Bit5 | Bit6 | Bit7 | Bit8 | Stop bit | Next Start bit
Possible Parity bit
is at Bit8 position.
Clock:
Square wave pulses for each bit. ** indicates LBCL bit control on the last pulse.
Idle frame:
High level followed by a Start bit.
Break frame:
Low level followed by Stop bit | Stop bit | Start bit.
8-bit word length (M = 00), 1 Stop bit
Data frame:
Start bit | Bit0 | Bit1 | Bit2 | Bit3 | Bit4 | Bit5 | Bit6 | Bit7 | Stop bit | Next Start bit
Possible Parity bit
is at Bit7 position.
Clock:
Square wave pulses for each bit. ** indicates LBCL bit control on the last pulse.
Idle frame:
High level followed by a Start bit.
Break frame:
Low level followed by Stop bit | Stop bit | Start bit.
7-bit word length (M = 10), 1 Stop bit
Data frame:
Start bit | Bit0 | Bit1 | Bit2 | Bit3 | Bit4 | Bit5 | Bit6 | Stop bit | Next Start bit
Possible Parity bit
is at Bit6 position.
Clock:
Square wave pulses for each bit. ** indicates LBCL bit control on the last pulse.
Idle frame:
High level followed by a Start bit.
Break frame:
Low level followed by Stop bit | Stop bit | Start bit.
** LBCL bit controls last data clock pulse
MS33194V2
39.5.5 USART FIFOs and thresholds
The USART can operate in FIFO mode.
The USART comes with a Transmit FIFO (TXFIFO) and a Receive FIFO (RXFIFO). The FIFO mode is enabled by setting FIFOEN in USART_CR1 register (bit 29). This mode is supported only in UART, SPI and smartcard modes.
Since the maximum data word length is 9 bits, the TXFIFO is 9-bit wide. However the RXFIFO default width is 12 bits. This is due to the fact that the receiver does not only store the data in the FIFO, but also the error flags associated to each character (Parity error, Noise error and Framing error flags).
Note: The received data is stored in the RXFIFO together with the corresponding flags. However, only the data are read when reading the RDR.
The status flags are available in the USART_ISR register.
It is possible to configure the TXFIFO and RXFIFO levels at which the Tx and RX interrupts are triggered. These thresholds are programmed through the RXFTCFG[2:0] and TXFTCFG[2:0] bitfields of the USART_CR3 control register.
In this case:
- • The Rx interrupt is generated when the number of received data in the RXFIFO reaches the threshold programmed in the RXFTCFG[2:0] bitfield.
In this case, the RXFT flag is set in the USART_ISR register. This means that RXFTCFG[2:0] data have been received: 1 data in USART_RDR and (RXFTCFG[2:0] – 1) data in the RXFIFO. As an example, when RXFTCFG[2:0] is programmed to 101, the RXFT flag is set when a number of data corresponding to the FIFO size has been received (FIFO size – 1 data in the RXFIFO and 1 data in the USART_RDR). As a result, the next received data does not set the overrun flag.
- • The Tx interrupt is generated when the number of empty locations in the TXFIFO is greater than the threshold programmed in the TXFTCFG[2:0] bitfield of the USART_CR3 register.
39.5.6 USART transmitter
The transmitter can send data words of either 7 or 8 or 9 bits, depending on the M bit status. The Transmit Enable bit (TE) must be set in order to activate the transmitter function. The data in the transmit shift register is output on the TX pin while the corresponding clock pulses are output on the CK pin.
Character transmission
During an USART transmission, data shifts out the least significant bit first (default configuration) on the TX pin. In this mode, the USART_TDR register consists of a buffer (TDR) between the internal bus and the transmit shift register.
When FIFO mode is enabled, the data written to the transmit data register (USART_TDR) are queued in the TXFIFO.
Every character is preceded by a start bit which corresponds to a low logic level for one bit period. The character is terminated by a configurable number of stop bits.
The number of stop bits can be configured to 0.5, 1, 1.5 or 2.
Note: The TE bit must be set before writing the data to be transmitted to the USART_TDR . The TE bit must not be reset during data transmission. Resetting the TE bit during the transmission corrupts the data on the TX pin as the baud rate counters get frozen. The current data being transmitted are then lost. An idle frame is sent when the TE bit is enabled.
Configurable stop bits
The number of stop bits to be transmitted with every character can be programmed in USART_CR2 , bits 13,12.
- • 1 stop bit: This is the default value of number of stop bits.
- • 2 stop bits: This is supported by normal USART, single-wire and modem modes.
- • 1.5 stop bits: To be used in smartcard mode.
An idle frame transmission includes the stop bits.
A break transmission is 10 low bits (when M[1:0] = 00 ) or 11 low bits (when M[1:0] = 01 ) or 9 low bits (when M[1:0] = 10 ) followed by 2 stop bits (see Section 39.5.1: USART block diagram ). It is not possible to transmit long breaks (break of length greater than 9/10/11 low bits).
Figure 420. Configurable stop bits
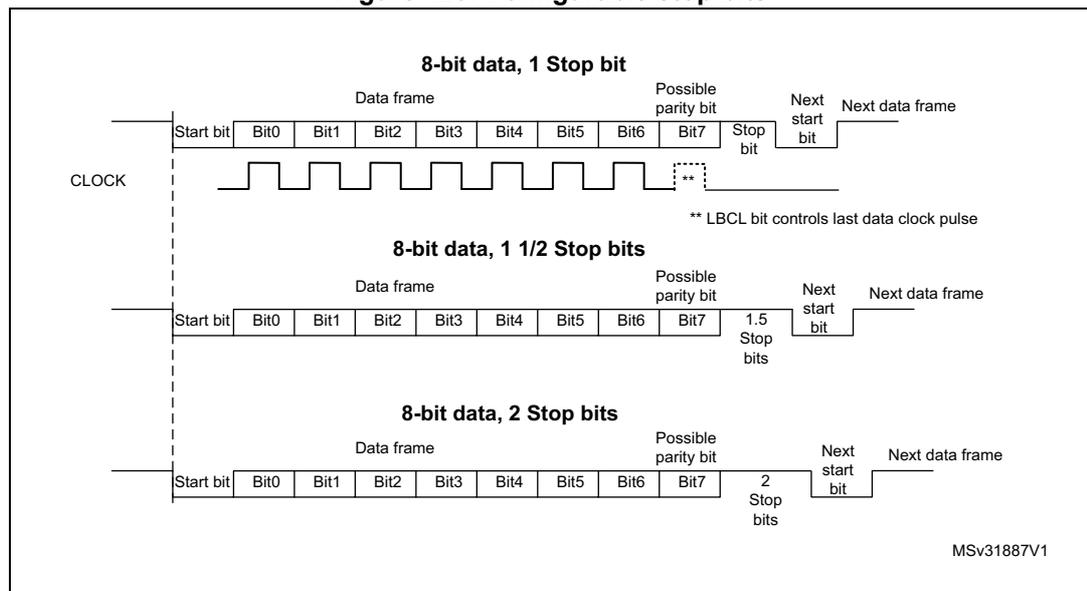
The diagram illustrates three data frame structures for 8-bit data transmission, showing the sequence of bits: Start bit, 8 data bits (Bit0 to Bit7), Possible parity bit, Stop bits, Next start bit, and Next data frame. A CLOCK signal is shown below the frames, with a note that the LBCL bit controls the last data clock pulse. The diagram is labeled MSv31887V1.
- 8-bit data, 1 Stop bit: The frame consists of a Start bit, 8 data bits (Bit0 to Bit7), Possible parity bit, 1 Stop bit, Next start bit, and Next data frame.
- 8-bit data, 1 1/2 Stop bits: The frame consists of a Start bit, 8 data bits (Bit0 to Bit7), Possible parity bit, 1.5 Stop bits, Next start bit, and Next data frame.
- 8-bit data, 2 Stop bits: The frame consists of a Start bit, 8 data bits (Bit0 to Bit7), Possible parity bit, 2 Stop bits, Next start bit, and Next data frame.
Character transmission procedure
To transmit a character, follow the sequence below:
- 1. Program the M bits in USART_CR1 to define the word length.
- 2. Select the desired baud rate using the USART_BRR register.
- 3. Program the number of stop bits in USART_CR2 .
- 4. Enable the USART by writing the UE bit in USART_CR1 register to 1.
- 5. Select DMA enable ( DMAT ) in USART_CR3 if multibuffer communication must take place. Configure the DMA register as explained in Section 39.5.20: Continuous communication using USART and DMA .
- 6. Set the TE bit in USART_CR1 to send an idle frame as first transmission.
- 7. Write the data to send in the USART_TDR register. Repeat this for each data to be transmitted in case of single buffer.
- – When FIFO mode is disabled, writing a data to the USART_TDR clears the TXE flag.
- – When FIFO mode is enabled, writing a data to the USART_TDR adds one data to the TXFIFO. Write operations to the USART_TDR are performed when TXFNF flag is set. This flag remains set until the TXFIFO is full.
- 8. When the last data is written to the USART_TDR register, wait until TC = 1.
- – When FIFO mode is disabled, this indicates that the transmission of the last frame has completed.
- – When FIFO mode is enabled, this indicates that both TXFIFO and shift register are empty.
This check is required to avoid corrupting the last transmission when the USART is disabled or enters Halt mode.
Single byte communication
- • When FIFO mode is disabled
Writing to the transmit data register always clears the TXE bit. The TXE flag is set by hardware. It indicates that:
- – the data have been moved from the USART_TDR register to the shift register and the data transmission has started;
- – the USART_TDR register is empty;
- – the next data can be written to the USART_TDR register without overwriting the previous data.
This flag generates an interrupt if the TXEIE bit is set.
When a transmission is ongoing, a write instruction to the USART_TDR register stores the data in the TDR buffer. It is then copied in the shift register at the end of the current transmission.
When no transmission is ongoing, a write instruction to the USART_TDR register places the data in the shift register, the data transmission starts, and the TXE bit is set.
- • When FIFO mode is enabled, the TXFNF (TXFIFO not full) flag is set by hardware to indicate that:
- – the TXFIFO is not full;
- – the USART_TDR register is empty;
- – the next data can be written to the USART_TDR register without overwriting the previous data. When a transmission is ongoing, a write operation to the USART_TDR register stores the data in the TXFIFO. Data are copied from the TXFIFO to the shift register at the end of the current transmission.
When the TXFIFO is not full, the TXFNF flag stays at 1 even after a write operation to USART_TDR register. It is cleared when the TXFIFO is full. This flag generates an interrupt if the TXFNFIE bit is set.
Alternatively, interrupts can be generated and data can be written to the FIFO when the TXFIFO threshold is reached. In this case, the CPU can write a block of data defined by the programmed trigger level.
If a frame is transmitted (after the stop bit) and the TXE flag (TXFE in case of FIFO mode) is set, the TC flag goes high. An interrupt is generated if the TCIE bit is set in the USART_CR1 register.
After writing the last data to the USART_TDR register, it is mandatory to wait until TC is set before disabling the USART or causing the microcontroller to enter the low-power mode (see Figure 421 ).
Figure 421. TC/TXE behavior when transmitting
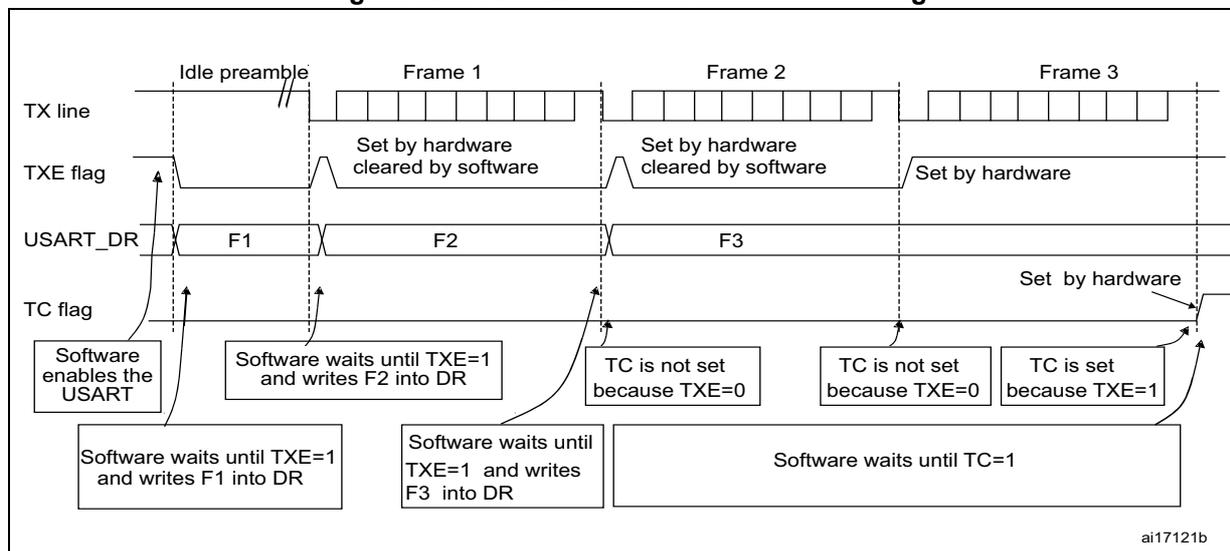
The diagram illustrates the timing and flag behavior for transmitting three frames (Frame 1, Frame 2, Frame 3) following an idle preamble. The signals shown are the TX line, TXE flag, USART_DR register, and TC flag.
- TX line: Shows the idle preamble followed by the transmission of Frame 1, Frame 2, and Frame 3.
- TXE flag:
- Is set by hardware when the USART_DR register is empty.
- Is cleared by software when a new data word is written to the USART_DR register.
- Is set by hardware after the transmission of a frame (e.g., after Frame 1 and Frame 2).
- Is set by hardware after the transmission of the last frame (Frame 3).
- USART_DR: Shows the data words F1, F2, and F3 being written into the register.
- TC flag:
- Is set by hardware when the transmission of the current data word is complete.
- Is not set if TXE=0 (e.g., when waiting to write F2 or F3).
- Is set when TXE=1 and the transmission is complete (e.g., after writing F3).
Software sequence:
- Software enables the USART.
- Software waits until TXE=1 and writes F1 into DR.
- Software waits until TXE=1 and writes F2 into DR.
- TC is not set because TXE=0.
- Software waits until TXE=1 and writes F3 into DR.
- TC is not set because TXE=0.
- TC is set because TXE=1.
- Software waits until TC=1.
ai17121b
Note: When FIFO management is enabled, the TXFNF flag is used for data transmission.
Break characters
Setting the SBKRQ bit transmits a break character. The break frame length depends on the M bit (see Figure 419 ).
If a 1 is written to the SBKRQ bit, a break character is sent on the TX line after completing the current character transmission. The SBKF bit is set by the write operation and it is reset by hardware when the break character is complete (during the stop bits after the break character). The USART inserts a logic 1 signal (stop) for the duration of 2 bits at the end of the break frame to guarantee the recognition of the start bit of the next frame.
When the SBKRQ bit is set, the break character is sent at the end of the current transmission.
When FIFO mode is enabled, sending the break character has priority on sending data even if the TXFIFO is full.
Idle characters
Setting the TE bit drives the USART to send an idle frame before the first data frame.
39.5.7 USART receiver
The USART can receive data words of either 7 or 8 or 9 bits depending on the M bits in the USART_CR1 register.
Start bit detection
The start bit detection sequence is the same when oversampling by 16 or by 8.
In the USART, the start bit is detected when a specific sequence of samples is recognized. This sequence is: 1 1 1 0 X 0 X 0 X 0 X 0 X 0 X 0.
Figure 422. Start bit detection when oversampling by 16 or 8
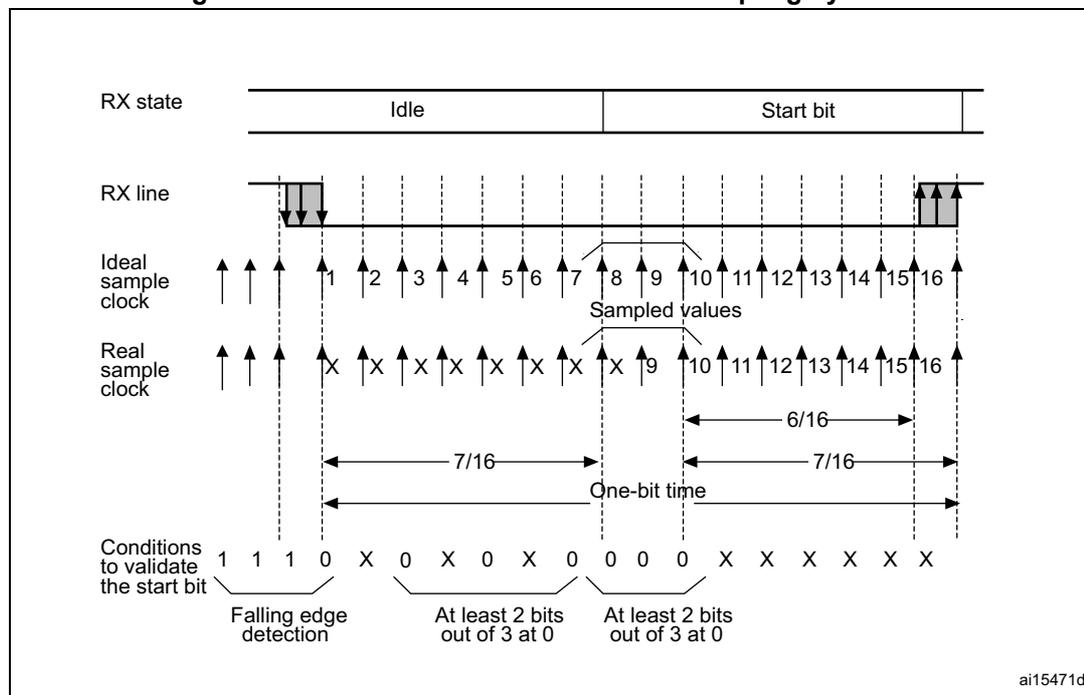
The diagram illustrates the start bit detection process in a USART/UART with oversampling. The RX state transitions from Idle to Start bit. The RX line shows a falling edge at the start of the start bit. The Ideal sample clock and Real sample clock are shown. The sequence of samples for validation is: 1 1 1 0 X 0 X 0 X 0 X 0 X 0 X 0. The conditions to validate the start bit are: Falling edge detection at bit 4, and at least 2 bits out of 3 at 0 for samples at bits 3, 5, 7 and bits 8, 9, 10. Bit times are marked as 7/16 and 6/16 of a one-bit time.
ai15471d
Note: If the sequence has not completed, the start bit detection aborts and the receiver returns to the idle state (no flag is set), where it waits for a falling edge.
The start bit is confirmed (RXNE flag set and interrupt generated if RXNEIE = 1, or RXFNE flag set and interrupt generated if RXFNEIE = 1 if FIFO mode enabled) if the 3 sampled bits are at 0 (first sampling on the 3rd, 5th and 7th bits finds the 3 bits at 0 and second sampling on the 8th, 9th and 10th bits also finds the 3 bits at 0).
The start bit is validated but the NE noise flag is set if,
- • for both samplings, 2 out of the 3 sampled bits are at 0 (sampling on the 3rd, 5th and 7th bits and sampling on the 8th, 9th and 10th bits), or
- • for one of the samplings (sampling on the 3rd, 5th and 7th bits or sampling on the 8th, 9th and 10th bits), 2 out of the 3 bits are found at 0.
If neither of the above conditions are met, the start detection aborts and the receiver returns to the idle state (no flag is set).
Character reception
During an USART reception, data are shifted out least significant bit first (default configuration) through the RX pin.
Character reception procedure
To receive a character, follow the sequence below:
- 1. Program the M bits in USART_CR1 to define the word length.
- 2. Select the desired baud rate using the baud rate register USART_BRR
- 3. Program the number of stop bits in USART_CR2.
- 4. Enable the USART by writing the UE bit in USART_CR1 register to 1.
- 5. Select DMA enable (DMAR) in USART_CR3 if multibuffer communication is to take place. Configure the DMA register as explained in Section 39.5.20: Continuous communication using USART and DMA .
- 6. Set the RE bit USART_CR1. This enables the receiver which begins searching for a start bit.
When a character is received:
- • When FIFO mode is disabled, the RXNE bit is set to indicate that the content of the shift register is transferred to the RDR. In other words, data have been received and can be read (as well as their associated error flags).
- • When FIFO mode is enabled, the RXFNE bit is set to indicate that the RXFIFO is not empty. Reading the USART_RDR returns the oldest data entered in the RXFIFO. When a data is received, it is stored in the RXFIFO together with the corresponding error bits.
- • An interrupt is generated if the RXNEIE (RXFNEIE when FIFO mode is enabled) bit is set.
- • The error flags can be set if a frame error, noise, parity or an overrun error was detected during reception.
- • In multibuffer communication mode:
- – When FIFO mode is disabled, the RXNE flag is set after every byte reception. It is cleared when the DMA reads the Receive data Register.
- – When FIFO mode is enabled, the RXFNE flag is set when the RXFIFO is not empty. After every DMA request, a data is retrieved from the RXFIFO. A DMA request is triggered when the RXFIFO is not empty, that is when there are data to be read from the RXFIFO.
- • In single-buffer mode:
- – When FIFO mode is disabled, clearing the RXNE flag is done by performing a software read from the USART_RDR register. The RXNE flag can also be cleared by programming RXFRQ bit to 1 in the USART_RQR register. The RXNE flag must be cleared before the end of the reception of the next character to avoid an overrun error.
- – When FIFO mode is enabled, the RXFNE is set when the RXFIFO is not empty. After every read operation from USART_RDR, a data is retrieved from the RXFIFO. When the RXFIFO is empty, the RXFNE flag is cleared. The RXFNE flag can also be cleared by programming RXFRQ bit to 1 in USART_RQR. When the RXFIFO is full, the first entry in the RXFIFO must be read before the end of the reception of the next character, to avoid an overrun error. The RXFNE flag generates an interrupt if the RXFNEIE bit is set. Alternatively, interrupts can be
generated and data can be read from RXFIFO when the RXFIFO threshold is reached. In this case, the CPU can read a block of data defined by the programmed threshold.
Break character
When a break character is received, the USART handles it as a framing error.
Idle character
When an idle frame is detected, it is handled in the same way as a data character reception except that an interrupt is generated if the IDLEIE bit is set.
Overrun error
- • FIFO mode disabled
An overrun error occurs if a character is received and RXNE has not been reset.
Data can not be transferred from the shift register to the RDR register until the RXNE bit is cleared. The RXNE flag is set after every byte reception.
An overrun error occurs if RXNE flag is set when the next data is received or the previous DMA request has not been serviced. When an overrun error occurs:
- – the ORE bit is set;
- – the RDR content is not lost. The previous data is available by reading the USART_RDR register.
- – the shift register is overwritten. After that, any data received during overrun is lost.
- – an interrupt is generated if either the RXNEIE or the EIE bit is set.
- • FIFO mode enabled
An overrun error occurs when the shift register is ready to be transferred and the receive FIFO is full.
Data can not be transferred from the shift register to the USART_RDR register until there is one free location in the RXFIFO. The RXFNE flag is set when the RXFIFO is not empty.
An overrun error occurs if the RXFIFO is full and the shift register is ready to be transferred. When an overrun error occurs:
- – The ORE bit is set.
- – The first entry in the RXFIFO is not lost. It is available by reading the USART_RDR register.
- – The shift register is overwritten. After that point, any data received during overrun is lost.
- – An interrupt is generated if either the RXFNEIE or EIE bit is set.
The ORE bit is reset by setting the ORECF bit in the USART_ICR register.
Note: The ORE bit, when set, indicates that at least 1 data has been lost.
When the FIFO mode is disabled, there are two possibilities
- • if RXNE = 1, then the last valid data is stored in the receive register (RDR) and can be read,
- • if RXNE = 0, the last valid data has already been read and there is nothing left to be read in the RDR register. This case can occur when the last valid data is read in the RDR register at the same time as the new (and lost) data is received.
Selecting the clock source and the appropriate oversampling method
The choice of the clock source is done through the Clock Control system (see Section : Reset and Clock Control (RCC) ). The clock source must be selected through the UE bit before enabling the USART.
The clock source must be selected according to two criteria:
- • Possible use of the USART in low-power mode
- • Communication speed.
The clock source frequency is
usart_ker_ck
.
When the dual clock domain and the wake-up from low-power mode features are supported, the
usart_ker_ck
clock source can be configurable in the RCC (see
Section : Reset and Clock Control (RCC)
). Otherwise the
usart_ker_ck
clock is the same as
usart_pclk
.
The
usart_ker_ck
clock can be divided by a programmable factor, defined in the
USART_PRESC
register.
Figure 423.
usart_ker_ck
clock divider block diagram
![Block diagram of the usart_ker_ck clock divider. An input signal 'usart_ker_ck' enters a block containing a 'USARTx_PRESC[3:0]' register. The output of this register, labeled 'usart_ker_ck_pres', is connected to a block labeled 'USARTx_BRR register and oversampling'. The diagram is labeled 'MSV40855V1' in the bottom right corner.](/RM0493-STM32WBA5/7826f8ad5f16ec039e19deecfef6d6c6_img.jpg)
graph LR
usart_ker_ck[usart_ker_ck] --> USARTx_PRESC[USARTx_PRESC[3:0]]
USARTx_PRESC -- usart_ker_ck_pres --> USARTx_BRR[USARTx_BRR register and oversampling]
Some
usart_ker_ck
sources enable the USART to receive data while the MCU is in low-power mode. Depending on the received data and wake-up mode selected, the USART wakes up the MCU, when needed, in order to transfer the received data, by performing a software read to the
USART_RDR
register or by DMA.
For the other clock sources, the system must be active to enable USART communications.
The communication speed range (specially the maximum communication speed) is also determined by the clock source.
The receiver implements different user-configurable oversampling techniques (except in synchronous mode) for data recovery by discriminating between valid incoming data and noise. This enables obtaining the best trade-off between the maximum communication speed and noise/clock inaccuracy immunity.
The oversampling method can be selected by programming the
OVER8
bit in the
USART_CR1
register either to 16 or 8 times the baud rate clock (see
Figure 424
and
Figure 425
).
Depending on the application:
- • select oversampling by 8 (
OVER8 = 1) to achieve higher speed (up tousart_ker_ck_pres/8). In this case the maximum receiver tolerance to clock deviation is reduced (refer to Section 39.5.9: Tolerance of the USART receiver to clock deviation ) - • select oversampling by 16 (
OVER8 = 0) to increase the tolerance of the receiver to clock deviations. In this case, the maximum speed is limited to maximumusart_ker_ck_pres/16(whereusart_ker_ck_presis the USART input clock divided by a prescaler).
Programming the ONEBIT bit in the USART_CR3 register selects the method used to evaluate the logic level. Two options are available:
- • The majority vote of the three samples in the center of the received bit. In this case, when the 3 samples used for the majority vote are not equal, the NE bit is set.
- • A single sample in the center of the received bit
Depending on the application:
- – select the three sample majority vote method (ONEBIT = 0) when operating in a noisy environment and reject the data when a noise is detected (refer to Table 378 ) because this indicates that a glitch occurred during the sampling.
- – select the single sample method (ONEBIT = 1) when the line is noise-free to increase the receiver tolerance to clock deviations (see Section 39.5.9: Tolerance of the USART receiver to clock deviation ). In this case the NE bit is never set.
When noise is detected in a frame:
- • The NE bit is set at the rising edge of the RXNE bit (RXFNE in case of FIFO mode enabled).
- • The invalid data is transferred from the Shift register to the USART_RDR register.
- • No interrupt is generated in case of single byte communication. However this bit rises at the same time as the RXNE bit (RXFNE in case of FIFO mode enabled) which itself generates an interrupt. In case of multibuffer communication an interrupt is issued if the EIE bit is set in the USART_CR3 register.
The NE bit is reset by setting NFCF bit in ICR register.
Note:
Noise error is not supported in SPI and IrDA modes.
Oversampling by 8 is not available in the smartcard, IrDA and LIN modes. In those modes, the OVER8 bit is forced to 0 by hardware.
Figure 424. Data sampling when oversampling by 16
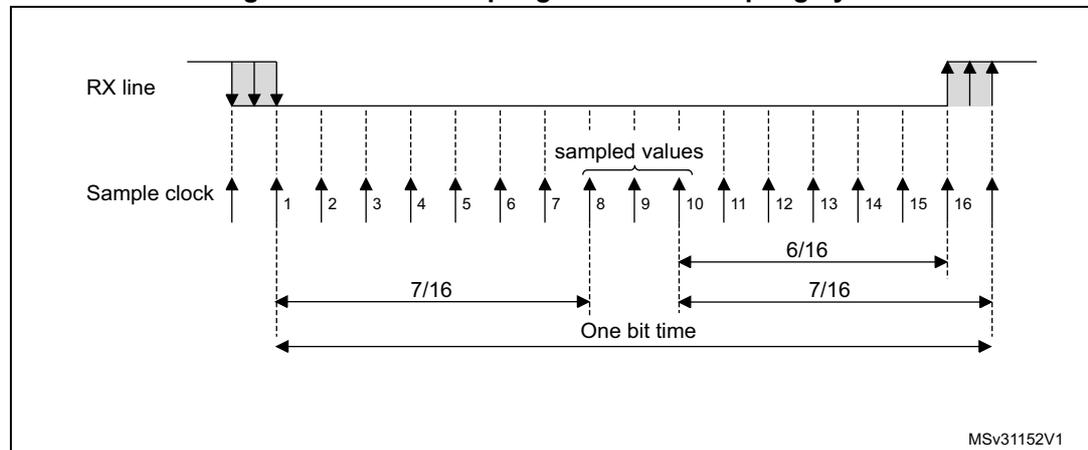
The diagram illustrates the timing for data sampling when oversampling by 16. The RX line is shown at the top, and the Sample clock is shown below it. The clock has 16 rising edges per bit time, labeled 1 through 16. The first three samples are taken at the beginning of the bit time. The 'sampled values' are indicated for samples 8, 9, and 10. The bit time is divided into 16 equal parts. The first 7/16 of the bit time is shown, followed by a 6/16 segment, and then another 7/16 segment, totaling one bit time. The diagram is labeled MSv31152V1.
Figure 425. Data sampling when oversampling by 8
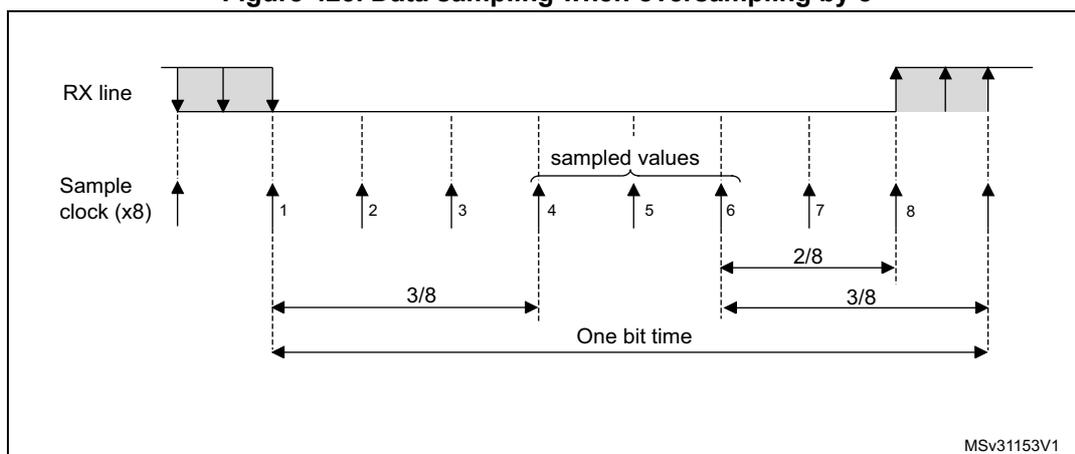
MSV31153V1
Table 378. Noise detection from sampled data
| Sampled value | NE status | Received bit value |
|---|---|---|
| 000 | 0 | 0 |
| 001 | 1 | 0 |
| 010 | 1 | 0 |
| 011 | 1 | 1 |
| 100 | 1 | 0 |
| 101 | 1 | 1 |
| 110 | 1 | 1 |
| 111 | 0 | 1 |
Framing error
A framing error is detected when the stop bit is not recognized on reception at the expected time, following either a de-synchronization or excessive noise.
When the framing error is detected:
- • the FE bit is set by hardware.
- • the invalid data is transferred from the Shift register to the USART_RDR register (RXFIFO in case FIFO mode is enabled).
- • no interrupt is generated in case of single byte communication. However this bit rises at the same time as the RXNE bit (RXFNE in case FIFO mode is enabled) which itself generates an interrupt. In case of multibuffer communication an interrupt is issued if the EIE bit is set in the USART_CR3 register.
The FE bit is reset by writing 1 to the FECF in the USART_ICR register.
Note: Framing error is not supported in SPI mode.
Configurable stop bits during reception
The number of stop bits to be received can be configured through the control bits of USART_CR: it can be either 1 or 2 in normal mode and 0.5 or 1.5 in smartcard mode.
- • 0.5 stop bit (reception in smartcard mode) : no sampling is done for 0.5 stop bit. As a consequence, no framing error and no break frame can be detected when 0.5 stop bit is selected.
- • 1 stop bit : sampling for 1 stop bit is done on the 8th, 9th and 10th samples.
- • 1.5 stop bits (smartcard mode)
When transmitting in smartcard mode, the device must check that the data are correctly sent. The receiver block must consequently be enabled (RE = 1 in USART_CR1) and the stop bit is checked to test if the smartcard has detected a parity error.
In the event of a parity error, the smartcard forces the data signal low during the sampling (NACK signal), which is flagged as a framing error. The FE flag is then set through RXNE flag (RXFNE if the FIFO mode is enabled) at the end of the 1.5 stop bit. Sampling for 1.5 stop bits is done on the 16th, 17th and 18th samples (1 baud clock period after the beginning of the stop bit). The 1.5 stop bit can be broken into 2 parts: one 0.5 baud clock period during which nothing happens, followed by 1 normal stop bit period during which sampling occurs halfway through (refer to Section 39.5.17: USART receiver timeout for more details).
- • 2 stop bits
Sampling for 2 stop bits is done on the 8th, 9th and 10th samples of the first stop bit.
The framing error flag is set if a framing error is detected during the first stop bit.
The second stop bit is not checked for framing error. The RXNE flag (RXFNE if the FIFO mode is enabled) is set at the end of the first stop bit.
39.5.8 USART baud rate generation
The baud rate for the receiver and transmitter (Rx and Tx) are both set to the value programmed in the USART_BRR register.
Equation 1: baud rate for standard USART (SPI mode included) (OVER8 = 0 or 1)
In case of oversampling by 16, the baud rate is given by the following formula:
In case of oversampling by 8, the baud rate is given by the following formula:
Equation 2: baud rate in smartcard, LIN and IrDA modes (OVER8 = 0)
The baud rate is given by the following formula:
USARTDIV is an unsigned fixed point number that is coded on the USART_BRR register.
- • When OVER8 = 0, BRR = USARTDIV.
- • When OVER8 = 1
- – BRR[2:0] = USARTDIV[3:0] shifted 1 bit to the right.
- – BRR[3] must be kept cleared.
- – BRR[15:4] = USARTDIV[15:4]
Note: The baud counters are updated to the new value in the baud registers after a write operation to USART_BRR. Hence the baud rate register value must not be changed during communication.
In case of oversampling by 16 and 8, USARTDIV must be greater than or equal to 16.
How to derive USARTDIV from USART_BRR register values
Example 1
To obtain 9600 bauds with usart_ker_ck_pres= 8 MHz:
- • In case of oversampling by 16:
USARTDIV = 8 000 000/9600
BRR[3:0] = USARTDIV = 0d833 = 0x0341 - • In case of oversampling by 8:
USARTDIV = 2 * 8 000 000/9600
USARTDIV = 1666,66 (0d1667 = 0x683)
BRR[3:0] = 0x3 >>1 = 0x1
BRR[3:0] = 0x681
Example 2
To obtain 921.6 kbauds with usart_ker_ck_pres = 48 MHz:
- • In case of oversampling by 16:
USARTDIV = 48 000 000/921 600
BRR[3:0] = USARTDIV = 52 = 0x34 - • In case of oversampling by 8:
USARTDIV = 2 * 48 000 000/921 600
USARTDIV = 104 (0d104 = 0x68)
BRR[3:0] = USARTDIV[3:0] >> 1 = 0x8 >> 1 = 0x4
BRR[3:0] = 0x64
39.5.9 Tolerance of the USART receiver to clock deviation
The USART asynchronous receiver operates correctly only if the total clock system deviation is less than the tolerance of the USART receiver.
The causes which contribute to the total deviation are:
- • DTRA: deviation due to the transmitter error (which also includes the deviation of the transmitter's local oscillator)
- • DQUANT: error due to the baud rate quantization of the receiver
- • DREC: deviation of the receiver local oscillator
- • DTCL: deviation due to the transmission line (generally due to the transceivers which can introduce an asymmetry between the low-to-high transition timing and the high-to-low transition timing)
where
DWU is the error due to sampling point deviation when the wake-up from low-power mode is used.
when M[1:0] = 01:
when M[1:0] = 00:
when M[1:0] = 10:
\( t_{\text{WUUSART}} \) is the time between the detection of the start bit falling edge and the instant when the clock (requested by the peripheral) is ready and reaching the peripheral, and the regulator is ready.
The USART receiver can receive data correctly at up to the maximum tolerated deviation specified in Table 379 , Table 380 , depending on the following settings:
- • 9-, 10- or 11-bit character length defined by the M bits in the USART_CR1 register
- • Oversampling by 8 or 16 defined by the OVER8 bit in the USART_CR1 register
- • Bits BRR[3:0] of USART_BRR register are equal to or different from 0000.
- • Use of 1 bit or 3 bits to sample the data, depending on the value of the ONEBIT bit in the USART_CR3 register.
| M bits | OVER8 bit = 0 | OVER8 bit = 1 | ||
|---|---|---|---|---|
| ONEBIT = 0 | ONEBIT = 1 | ONEBIT = 0 | ONEBIT = 1 | |
| 00 | 3.75% | 4.375% | 2.50% | 3.75% |
| 01 | 3.41% | 3.97% | 2.27% | 3.41% |
| 10 | 4.16% | 4.86% | 2.77% | 4.16% |
| M bits | OVER8 bit = 0 | OVER8 bit = 1 | ||
|---|---|---|---|---|
| ONEBIT = 0 | ONEBIT = 1 | ONEBIT = 0 | ONEBIT = 1 | |
| 00 | 3.33% | 3.88% | 2% | 3% |
| 01 | 3.03% | 3.53% | 1.82% | 2.73% |
| 10 | 3.7% | 4.31% | 2.22% | 3.33% |
Note: The data specified in Table 379 and Table 380 may slightly differ in the special case when the received frames contain some Idle frames of exactly 10-bit times when M bits = 00 (11-bit times when M= 01 or 9- bit times when M = 10).
39.5.10 USART auto baud rate detection
The USART can detect and automatically set the USART_BRR register value based on the reception of one character. Automatic baud rate detection is useful under two circumstances:
- • The communication speed of the system is not known in advance.
- • The system is using a relatively low accuracy clock source and this mechanism enables the correct baud rate to be obtained without measuring the clock deviation.
The clock source frequency must be compatible with the expected communication speed.
- • When oversampling by 16, the baud rate ranges from usart_ker_ck_pres/65535 and usart_ker_ck_pres/16.
- • When oversampling by 8, the baud rate ranges from usart_ker_ck_pres/32763 and usart_ker_ck_pres/8.
Before activating the auto baud rate detection, the auto baud rate detection mode must be selected through the ABRMOD[1:0] field in the USART_CR2 register. There are four modes based on different character patterns. In these auto baud rate modes, the baud rate is measured several times during the synchronization data reception and each measurement is compared to the previous one.
These modes are the following:
- •
Mode 0:
Any character starting with a bit at 1.
In this case the USART measures the duration of the start bit (falling edge to rising edge). - •
Mode 1:
Any character starting with a 10xx bit pattern.
In this case, the USART measures the duration of the Start and of the 1st data bit. The measurement is done falling edge to falling edge, to ensure a better accuracy in the case of slow signal slopes. - •
Mode 2:
A 0x7F character frame (it may be a 0x7F character in LSB first mode or a 0xFE in MSB first mode).
In this case, the baud rate is updated first at the end of the start bit (BRs), then at the end of bit 6 (based on the measurement done from falling edge to falling edge: BR6). Bit0 to bit6 are sampled at BRs while further bits of the character are sampled at BR6. - •
Mode 3:
A 0x55 character frame.
In this case, the baud rate is updated first at the end of the start bit (BRs), then at the end of bit0 (based on the measurement done from falling edge to falling edge: BR0), and finally at the end of bit6 (BR6). Bit 0 is sampled at BRs, bit 1 to bit 6 are sampled at BR0, and further bits of the character are sampled at BR6. In parallel, another check is performed for each intermediate RX line transition. An error is generated if the transitions on RX are not sufficiently synchronized with the receiver (the receiver being based on the baud rate calculated on bit 0).
Prior to activating the auto baud rate detection, the USART_BRR register must be initialized by writing a non-zero baud rate value.
The automatic baud rate detection is activated by setting the ABREN bit in the USART_CR2 register. The USART then waits for the first character on the RX line. The auto baud rate operation completion is indicated by the setting of the ABRF flag in the USART_ISR register. If the line is noisy, the correct baud rate detection cannot be guaranteed. In this case the BRR value may be corrupted and the ABRE error flag is set. This also happens if the communication speed is not compatible with the automatic baud rate detection range (bit duration not between 16 and 65536 clock periods (oversampling by 16) and not between 8 and 65536 clock periods (oversampling by 8)).
The auto baud rate detection can be re-launched later by resetting the ABRF flag (by writing a 0).
When FIFO management is disabled and an auto baud rate error occurs, the ABRE flag is set through RXNE and FE bits.
When FIFO management is enabled and an auto baud rate error occurs, the ABRE flag is set through RXFNE and FE bits.
If the FIFO mode is enabled, the auto baud rate detection must be made using the data on the first RXFIFO location. So, prior to launching the auto baud rate detection, make sure that the RXFIFO is empty by checking the RXFNE flag in USART_ISR register.
Note: The BRR value might be corrupted if the USART is disabled (UE = 0) during an auto baud rate operation.
39.5.11 USART multiprocessor communication
It is possible to perform USART multiprocessor communications (with several USARTs connected in a network). For instance one of the USARTs can be the master with its TX output connected to the RX inputs of the other USARTs, while the others are slaves with their respective TX outputs logically ANDed together and connected to the RX input of the master.
In multiprocessor configurations, it is often desirable that only the intended message recipient actively receives the full message contents, thus reducing redundant USART service overhead for all non addressed receivers.
The non-addressed devices can be placed in mute mode by means of the muting function. To use the mute mode feature, the MME bit must be set in the USART_CR1 register.
Note: When FIFO management is enabled and MME is already set, MME bit must not be cleared and then set again quickly (within two usart_ker_ck cycles), otherwise mute mode might remain active.
When the mute mode is enabled:
- • none of the reception status bits can be set;
- • all the receive interrupts are inhibited;
- • the RWU bit in USART_ISR register is set to 1. RWU can be controlled automatically by hardware or by software, through the MMRQ bit in the USART_RQR register, under certain conditions.
The USART can enter or exit from mute mode using one of two methods, depending on the WAKE bit in the USART_CR1 register:
- • Idle line detection if the WAKE bit is reset,
- • Address mark detection if the WAKE bit is set.
Idle line detection (WAKE = 0)
The USART enters mute mode when the MMRQ bit is written to 1 and the RWU is automatically set.
The USART wakes up when an Idle frame is detected. The RWU bit is then cleared by hardware but the IDLE bit is not set in the USART_ISR register. An example of mute mode behavior using Idle line detection is given in Figure 426 .
Figure 426. Mute mode using Idle line detection
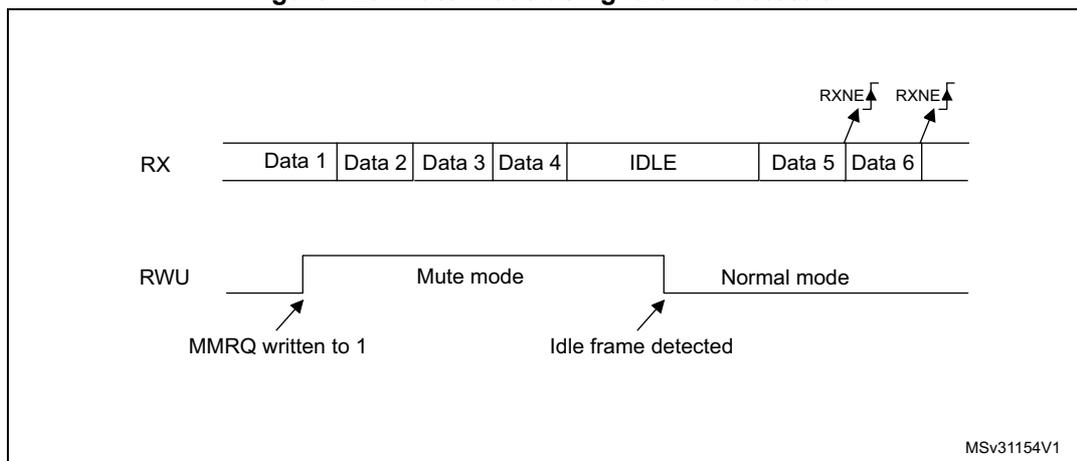
Note: If the MMRQ is set while the IDLE character has already elapsed, mute mode is not entered (RWU is not set).
If the USART is activated while the line is idle, the idle state is detected after the duration of one IDLE frame (not only after the reception of one character frame).
4-bit/7-bit address mark detection (WAKE = 1)
In this mode, bytes are recognized as addresses if their MSB is a 1, otherwise they are considered as data. In an address byte, the address of the targeted receiver is put in the 4 or 7 LSBs. The choice of 7 or 4 bit address detection is done using the ADDM7 bit. This 4-bit/7-bit word is compared by the receiver with its own address which is programmed in the ADD bits in the USART_CR2 register.
Note: In 7-bit and 9-bit data modes, address detection is done on 6-bit and 8-bit addresses (ADD[5:0] and ADD[7:0]) respectively.
The USART enters mute mode when an address character is received which does not match its programmed address. In this case, the RWU bit is set by hardware. The RXNE flag is not set for this address byte and no interrupt or DMA request is issued when the USART enters mute mode. When FIFO management is enabled, the software must ensure that there is at least one empty location in the RXFIFO before entering mute mode.
The USART also enters mute mode when the MMRQ bit is written to 1. The RWU bit is also automatically set in this case.
The USART exits from mute mode when an address character is received which matches the programmed address. Then the RWU bit is cleared and subsequent bytes are received normally. The RXNE/RXFNE bit is set for the address character since the RWU bit has been cleared.
Note: When FIFO management is enabled, when MMRQ is set while the receiver is sampling last bit of a data, this data may be received before effectively entering in mute mode
An example of mute mode behavior using address mark detection is given in Figure 427.
Figure 427. Mute mode using address mark detection
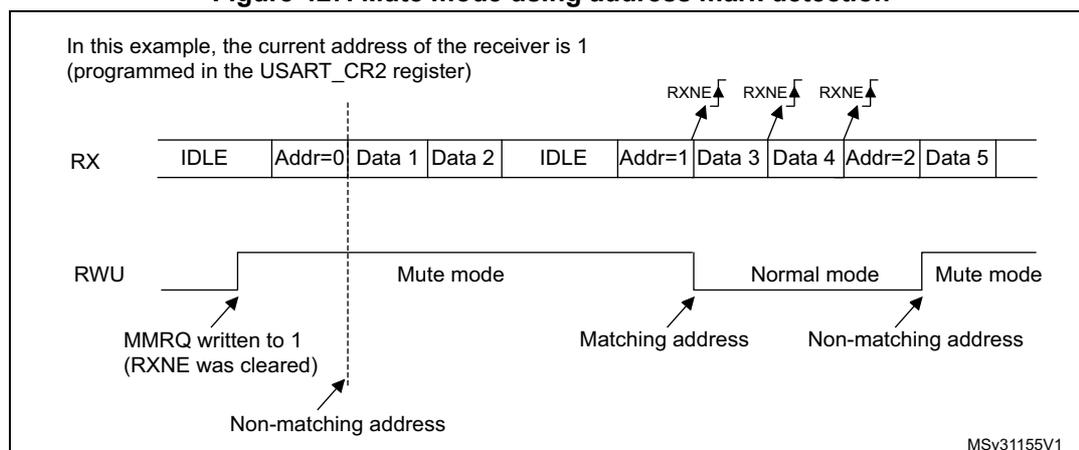
In this example, the current address of the receiver is 1 (programmed in the USART_CR2 register)
The diagram illustrates the RX and RWU signals during mute mode using address mark detection. The RX signal shows a sequence of IDLE, Addr=0, Data 1, Data 2, IDLE, Addr=1, Data 3, Data 4, Addr=2, Data 5. The RWU signal shows Mute mode, Normal mode, and Mute mode transitions. RXNE flags are shown for Addr=1, Data 3, and Addr=2. Annotations include 'MMRQ written to 1 (RXNE was cleared)', 'Non-matching address', 'Matching address', and 'Non-matching address'.
MSV31155V1
39.5.12 USART Modbus communication
The USART offers basic support for the implementation of Modbus/RTU and Modbus/ASCII protocols. Modbus/RTU is a half-duplex, block-transfer protocol. The control part of the protocol (address recognition, block integrity control and command interpretation) must be implemented in software.
The USART offers basic support for the end of the block detection, without software overhead or other resources.
Modbus/RTU
In this mode, the end of one block is recognized by a “silence” (idle line) for more than 2 character times. This function is implemented through the programmable timeout function.
The timeout function and interrupt must be activated, through the RTOEN bit in the USART_CR2 register and the RTOIE in the USART_CR1 register. The value corresponding to a timeout of 2 character times (for example 22 x bit time) must be programmed in the RTO register. When the receive line is idle for this duration, after the last stop bit is received, an interrupt is generated, informing the software that the current block reception has not completed.
Modbus/ASCII
In this mode, the end of a block is recognized by a specific (CR/LF) character sequence. The USART manages this mechanism using the character match function.
By programming the LF ASCII code in the ADD[7:0] field and by activating the character match interrupt (CMIE = 1), the software is informed when a LF has been received and can check the CR/LF in the DMA buffer.
39.5.13 USART parity control
Parity control (generation of parity bit in transmission and parity checking in reception) can be enabled by setting the PCE bit in the USART_CR1 register. Depending on the frame length defined by the M bits, the possible USART frame formats are as listed in Table 381 .
Table 381. USART frame formats
| M bits | PCE bit | USART frame (1) |
|---|---|---|
| 00 | 0 | | SB | 8 bit data | STB | |
| 00 | 1 | | SB | 7-bit data | PB | STB | |
| 01 | 0 | | SB | 9-bit data | STB | |
| 01 | 1 | | SB | 8-bit data PB | STB | |
| 10 | 0 | | SB | 7bit data | STB | |
| 10 | 1 | | SB | 6-bit data | PB | STB | |
- 1. Legends: SB: start bit, STB: stop bit, PB: parity bit. In the data register, the PB is always taking the MSB position (8th or 7th, depending on the M bit value).
Even parity
The parity bit is calculated to obtain an even number of “1s” inside the frame of the 6, 7 or 8 LSB bits (depending on M bit values) and the parity bit.
As an example, if data = 00110101, and 4 bits are set, then the parity bit is equal to 0 if even parity is selected (PS bit in USART_CR1 = 0).
Odd parity
The parity bit is calculated to obtain an odd number of “1s” inside the frame made of the 6, 7 or 8 LSB bits (depending on M bit values) and the parity bit.
As an example, if data = 00110101 and 4 bits set, then the parity bit is equal to 1 if odd parity is selected (PS bit in USART_CR1 = 1).
Parity checking in reception
If the parity check fails, the PE flag is set in the USART_ISR register and an interrupt is generated if PEIE is set in the USART_CR1 register. The PE flag is cleared by software writing 1 to the PECF in the USART_ICR register.
Parity generation in transmission
If the PCE bit is set in USART_CR1, then the MSB bit of the data written in the data register is transmitted but is changed by the parity bit (even number of “1s” if even parity is selected (PS = 0) or an odd number of “1s” if odd parity is selected (PS = 1)).
39.5.14 USART LIN (local interconnection network) mode
This section is relevant only when LIN mode is supported. Refer to Section 39.4: USART implementation .
The LIN mode is selected by setting the LINEN bit in the USART_CR2 register. In LIN mode, the following bits must be kept cleared:
- • STOP[1:0] and CLKEN in the USART_CR2 register,
- • SCEN, HDSEL and IREN in the USART_CR3 register.
LIN transmission
The procedure described in Section 39.5.5 has to be applied for LIN master transmission. It must be the same as for normal USART transmission with the following differences:
- • Clear the M bit to configure 8-bit word length.
- • Set the LINEN bit to enter LIN mode. In this case, setting the SBKRQ bit sends 13 zero bits as a break character. Then 2 bits of value '1' are sent to enable the next start detection.
LIN reception
When LIN mode is enabled, the break detection circuit is activated. The detection is totally independent from the normal USART receiver. A break can be detected whenever it occurs, during Idle state or during a frame.
When the receiver is enabled (RE = 1 in USART_CR1), the circuit looks at the RX input for a start signal. The method for detecting start bits is the same when searching break characters or data. After a start bit has been detected, the circuit samples the next bits exactly like for the data (on the 8th, 9th and 10th samples). If 10 (when the LBDL = 0 in USART_CR2) or 11 (when LBDL = 1 in USART_CR2) consecutive bits are detected as 0, and are followed by a delimiter character, the LBDF flag is set in USART_ISR. If the LBDIE bit = 1, an interrupt is generated. Before validating the break, the delimiter is checked for as it signifies that the RX line has returned to a high level.
If a 1 is sampled before the 10 or 11 have occurred, the break detection circuit cancels the current detection and searches for a start bit again.
If the LIN mode is disabled (LINEN = 0), the receiver continues working as normal USART, without taking into account the break detection.
If the LIN mode is enabled (LINEN = 1), as soon as a framing error occurs (that is, stop bit detected at 0, which is the case for any break frame), the receiver stops until the break detection circuit receives either a '1', if the break word was not complete, or a delimiter character if a break has been detected.
The behavior of the break detector state machine and the break flag is shown in Figure 428 .
Examples of break frames are given in Figure 429 .
Figure 428. Break detection in LIN mode (11-bit break length - LBDL bit is set)
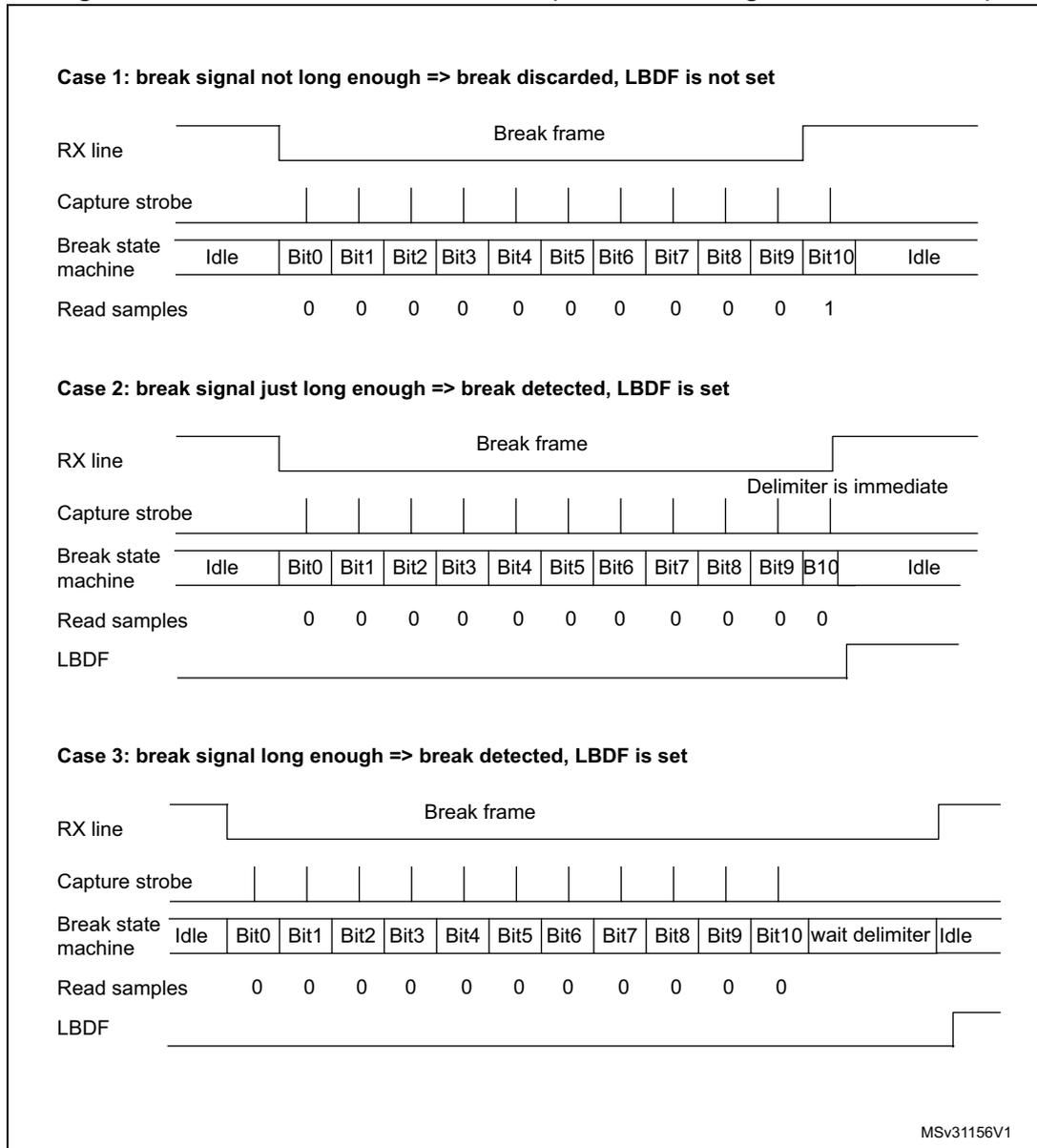
Case 1: break signal not long enough => break discarded, LBDF is not set
| RX line | Break frame | ||||||||||||
| Capture strobe | | | | | | | | | | | | | | | | | | | | | | | ||
| Break state machine | Idle | Bit0 | Bit1 | Bit2 | Bit3 | Bit4 | Bit5 | Bit6 | Bit7 | Bit8 | Bit9 | Bit10 | Idle |
| Read samples | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | ||
Case 2: break signal just long enough => break detected, LBDF is set
| RX line | Break frame | ||||||||||||
| Capture strobe | | | | | | | | | | | | | | | | | | | | | | | ||
| Break state machine | Idle | Bit0 | Bit1 | Bit2 | Bit3 | Bit4 | Bit5 | Bit6 | Bit7 | Bit8 | Bit9 | Bit10 | Idle |
| Read samples | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |||
| LBDF | Set | ||||||||||||
Delimiter is immediate
Case 3: break signal long enough => break detected, LBDF is set
| RX line | Break frame | |||||||||||||
| Capture strobe | | | | | | | | | | | | | | | | | | | | | | | |||
| Break state machine | Idle | Bit0 | Bit1 | Bit2 | Bit3 | Bit4 | Bit5 | Bit6 | Bit7 | Bit8 | Bit9 | Bit10 | wait delimiter | Idle |
| Read samples | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||||
| LBDF | Set | |||||||||||||
MSv31156V1
Figure 429. Break detection in LIN mode vs. Framing error detection
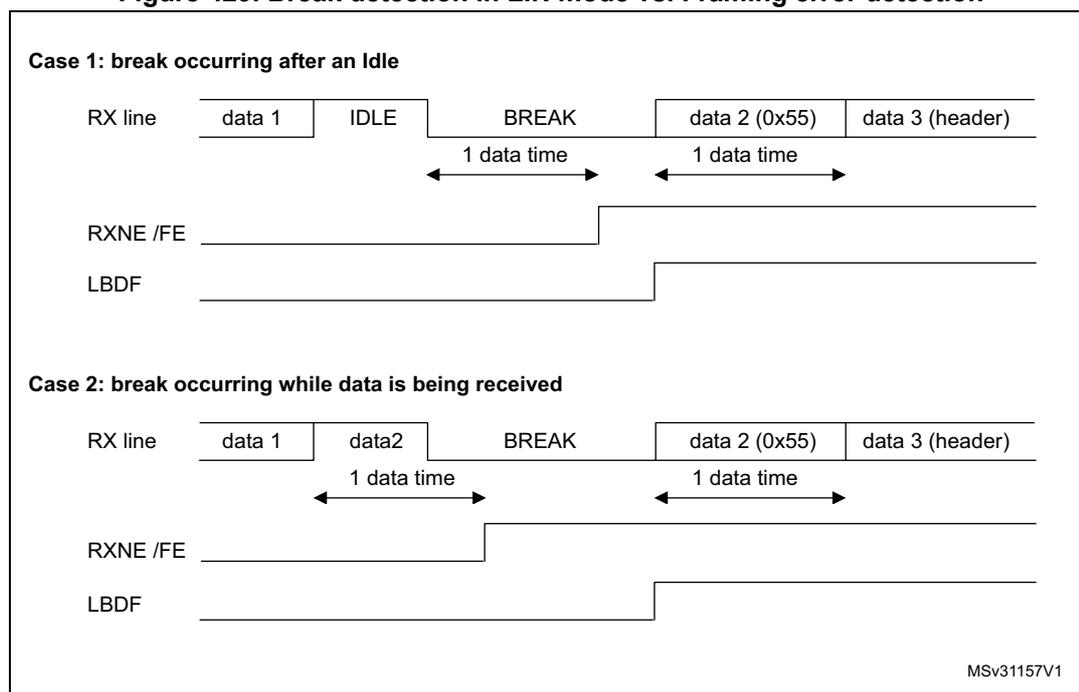
Case 1: break occurring after an Idle
The diagram shows the RX line transitioning from an IDLE state to a BREAK state, then to data 2 (0x55) and data 3 (header). The RXNE/FE signal is shown as a step function that goes high when the RX line is IDLE and goes low when the RX line is BREAK. The LBDF signal is shown as a step function that goes high when the RX line is BREAK and goes low when the RX line is IDLE. The time interval between the start of the BREAK state and the start of data 2 is marked as 1 data time. The time interval between the start of data 2 and the start of data 3 is also marked as 1 data time.
Case 2: break occurring while data is being received
The diagram shows the RX line transitioning from data 1 to data 2, then to a BREAK state, then to data 2 (0x55) and data 3 (header). The RXNE/FE signal is shown as a step function that goes high when the RX line is data 1 and goes low when the RX line is data 2. The LBDF signal is shown as a step function that goes high when the RX line is BREAK and goes low when the RX line is data 2. The time interval between the start of data 2 and the start of the BREAK state is marked as 1 data time. The time interval between the start of the BREAK state and the start of data 2 (0x55) is also marked as 1 data time.
MSv31157V1
39.5.15 USART synchronous mode
Master mode
The synchronous master mode is selected by programming the CLKEN bit in the USART_CR2 register to 1. In synchronous mode, the following bits must be kept cleared:
- • LINEN bit in the USART_CR2 register,
- • SCEN, HDSEL and IREN bits in the USART_CR3 register.
In this mode, the USART can be used to control bidirectional synchronous serial communications in master mode. The CK pin is the output of the USART transmitter clock. No clock pulses are sent to the CK pin during start bit and stop bit. Depending on the state of the LBCL bit in the USART_CR2 register, clock pulses are, or are not, generated during the last valid data bit (address mark). The CPOL bit in the USART_CR2 register is used to select the clock polarity, and the CPHA bit in the USART_CR2 register is used to select the phase of the external clock (see Figure 430 , Figure 431 and Figure 432 ).
During the Idle state, preamble and send break, the external CK clock is not activated.
In synchronous master mode, the USART transmitter operates exactly like in asynchronous mode. However, since CK is synchronized with TX (according to CPOL and CPHA), the data on TX is synchronous.
In synchronous master mode, the USART receiver operates in a different way compared to asynchronous mode. If RE is set to 1, the data are sampled on CK (rising or falling edge, depending on CPOL and CPHA), without any oversampling. A given setup and a hold time must be respected (which depends on the baud rate: 1/16 bit time).
Note: In master mode, the CK pin operates in conjunction with the TX pin. Thus, the clock is provided only if the transmitter is enabled (TE = 1) and data are being transmitted (USART_TDR data register written). This means that it is not possible to receive synchronous data without transmitting data.
Figure 430. USART example of synchronous master transmission
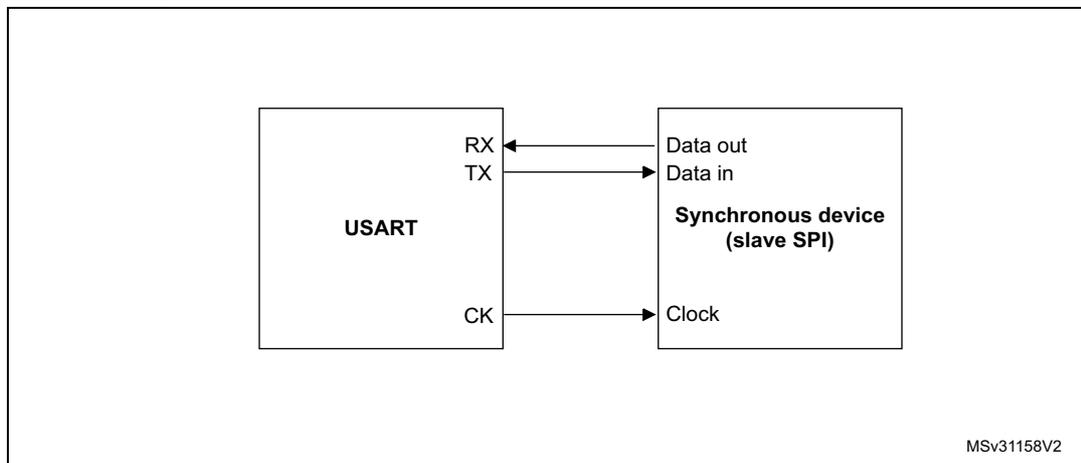
+-----------------+ +-----------------------------+ | USART | | Synchronous device | | | RX <-----| (slave SPI) | | | TX ------| Data out | | | | Data in | | | CK ------| | | | | Clock | +-----------------+ +-----------------------------+
The diagram shows a USART block on the left and a 'Synchronous device (slave SPI)' block on the right. The USART has three pins: RX, TX, and CK. The RX pin is connected to the 'Data out' pin of the slave device. The TX pin is connected to the 'Data in' pin of the slave device. The CK pin is connected to the 'Clock' pin of the slave device.
MSv31158V2
Figure 431. USART data clock timing diagram in synchronous master mode (M bits = 00)
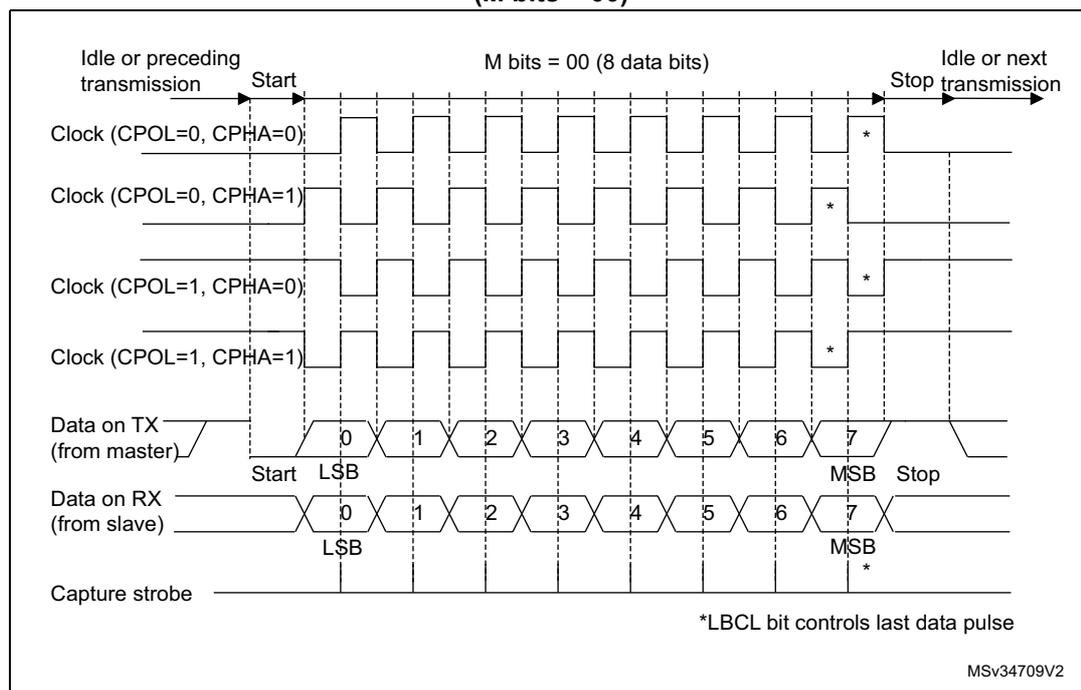
The timing diagram illustrates the relationship between the clock and data lines during an 8-bit synchronous transmission (M bits = 00). It shows four clock variations based on CPOL (Clock Polarity) and CPHA (Clock Phase):
1. Clock (CPOL=0, CPHA=0)
2. Clock (CPOL=0, CPHA=1)
3. Clock (CPOL=1, CPHA=0)
4. Clock (CPOL=1, CPHA=1)
Below the clocks, 'Data on TX (from master)' and 'Data on RX (from slave)' show 8 bits (0 to 7) framed by Start and Stop conditions. Bit 0 is the LSB and bit 7 is the MSB. A 'Capture strobe' indicates the sampling points. An asterisk (*) on the last clock pulse for each mode refers to the note: '*LBCL bit controls last data pulse'.
MSv34709V2
Figure 432. USART data clock timing diagram in synchronous master mode
(M bits = 01)
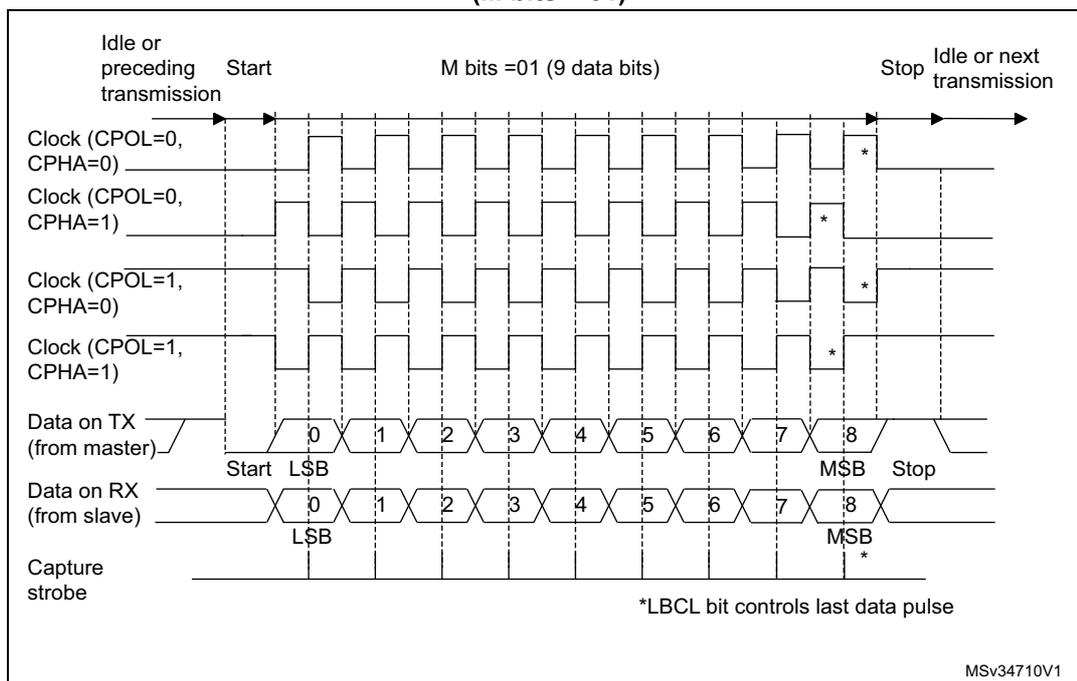
The diagram illustrates the timing for USART synchronous master mode with 9 data bits. It shows four clock phases based on CPOL and CPHA settings. The TX line (from master) and RX line (from slave) are shown with data bits 0-8. The Start bit is at the beginning, and the Stop bit is at the end. The Capture strobe is indicated for each clock phase. A note at the bottom right states that the *LBCL bit controls the last data pulse. The diagram is labeled MSv34710V1.
Slave mode
The synchronous slave mode is selected by programming the SLVEN bit in the USART_CR2 register to 1. In synchronous slave mode, the following bits must be kept cleared:
- • LINEN and CLKEN bits in the USART_CR2 register,
- • SCEN, HDSEL and IREN bits in the USART_CR3 register.
In this mode, the USART can be used to control bidirectional synchronous serial communications in slave mode. The CK pin is the input of the USART in slave mode.
Note: When the peripheral is used in SPI slave mode, the frequency of peripheral clock source (usart_ker_ck_pres) must be greater than 3 times the CK input frequency.
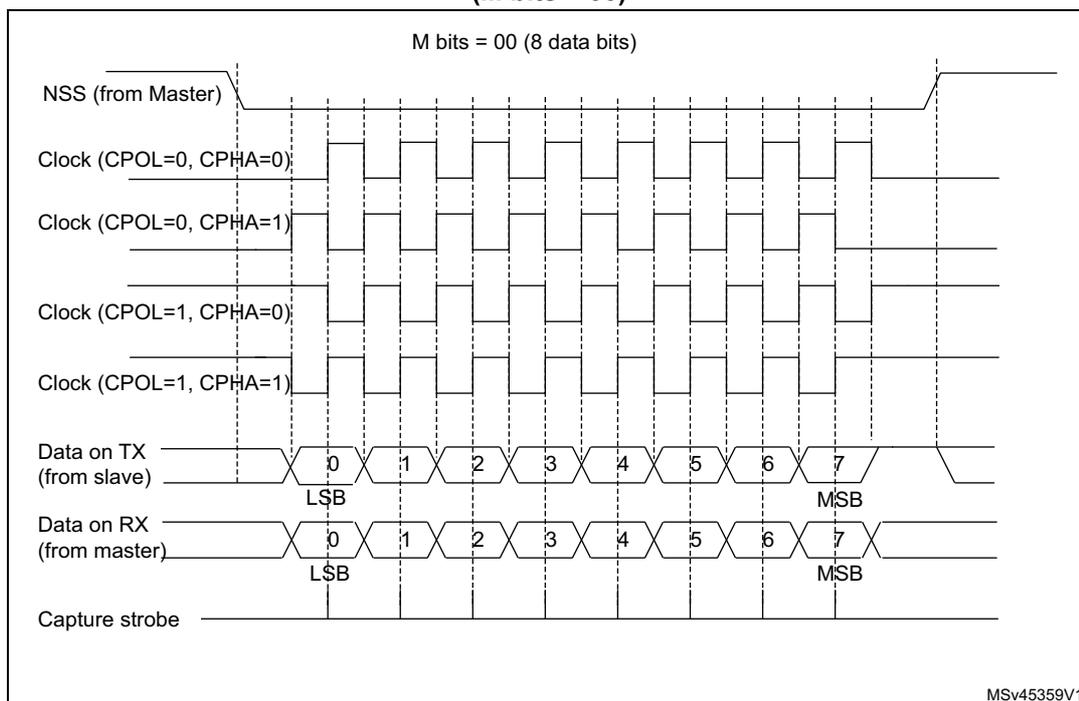
The CPOL bit and the CPHA bit in the USART_CR2 register are used to select the clock polarity and the phase of the external clock, respectively (see Figure 433).
An underrun error flag is available in slave transmission mode. This flag is set when the first clock pulse for data transmission appears while the software has not yet loaded any value to USART_TDR.
The slave supports the hardware and software NSS management.
Figure 433. USART data clock timing diagram in synchronous slave mode (M bits = 00)
Slave Select (NSS) pin management
The hardware or software slave select management can be set through the DIS_NSS bit in the USART_CR2 register:
- • Software NSS management (DIS_NSS = 1)
SPI slave is always selected and NSS input pin is ignored.
The external NSS pin remains free for other application uses. - • Hardware NSS management (DIS_NSS = 0)
The SPI slave selection depends on NSS input pin. The slave is selected when NSS is low and deselected when NSS is high.
Note: The LBCL (used only on SPI master mode), CPOL and CPHA bits have to be selected when the USART is disabled (UE = 0) to ensure that the clock pulses function correctly.
In SPI slave mode, the USART must be enabled before starting the master communications (or between frames while the clock is stable). Otherwise, if the USART slave is enabled while the master is in the middle of a frame, it becomes desynchronized with the master. The data register of the slave needs to be ready before the first edge of the communication clock or before the end of the ongoing communication, otherwise the SPI slave transmits zeros.
SPI slave underrun error
When an underrun error occurs, the UDR flag is set in the USART_ISR register, and the SPI slave goes on sending the last data until the underrun error flag is cleared by software.
The underrun flag is set at the beginning of the frame. An underrun error interrupt is triggered if EIE bit is set in the USART_CR3 register.
The underrun error flag is cleared by setting bit UDRCF in the USART_ICR register.
In case of underrun error, it is still possible to write to the TDR register. Clearing the underrun error enables sending new data.
If an underrun error occurred and there is no new data written in TDR, then the TC flag is set at the end of the frame.
Note: An underrun error may occur if the moment the data is written to the USART_TDR is too close to the first CK transmission edge. To avoid this underrun error, the USART_TDR must be written 3 usart_ker_ck cycles before the first CK edge.
39.5.16 USART single-wire half-duplex communication
Single-wire half-duplex mode is selected by setting the HDSEL bit in the USART_CR3 register. In this mode, the following bits must be kept cleared:
- • LINEN and CLKEN bits in the USART_CR2 register,
- • SCEN and IREN bits in the USART_CR3 register.
The USART can be configured to follow a single-wire half-duplex protocol where the TX and RX lines are internally connected. The selection between half- and full-duplex communication is made with a control bit HDSEL in USART_CR3.
As soon as HDSEL is written to 1:
- • The TX and RX lines are internally connected.
- • The RX pin is no longer used.
- • The TX pin is always released when no data is transmitted. Thus, it acts as a standard I/O in idle or in reception. It means that the I/O must be configured so that TX is configured as alternate function open-drain with an external pull-up.
Apart from this, the communication protocol is similar to normal USART mode. Any conflict on the line must be managed by software (for instance by using a centralized arbiter). In particular, the transmission is never blocked by hardware and continues as soon as data are written in the data register while the TE bit is set.
39.5.17 USART receiver timeout
The receiver timeout feature is enabled by setting the RTOEN bit in the USART_CR2 control register.
The timeout duration is programmed using the RTO bitfields in the USART_RTOR register.
The receiver timeout counter starts counting:
- • from the end of the stop bit if STOP = 00 or STOP = 11
- • from the end of the second stop bit if STOP = 10.
- • from the beginning of the stop bit if STOP = 01.
When the timeout duration has elapsed, the RTOF flag in the USART_ISR register is set. A timeout is generated if RTOIE bit in USART_CR1 register is set.
39.5.18 USART smartcard mode
This section is relevant only when smartcard mode is supported. Refer to Section 39.4: USART implementation .
Smartcard mode is selected by setting the SCEN bit in the USART_CR3 register. In smartcard mode, the following bits must be kept cleared:
- • LINEN bit in the USART_CR2 register,
- • HDSEL and IREN bits in the USART_CR3 register.
The CLKEN bit can also be set to provide a clock to the smartcard.
The smartcard interface is designed to support asynchronous smartcard protocol as defined in the ISO 7816-3 standard. Both T = 0 (character mode) and T = 1 (block mode) are supported.
The USART must be configured as:
- • 8 bits plus parity: M = 1 and PCE = 1 in the USART_CR1 register
- • 1.5 stop bits when transmitting and receiving data: STOP = 11 in the USART_CR2 register. It is also possible to choose 0.5 stop bit for reception.
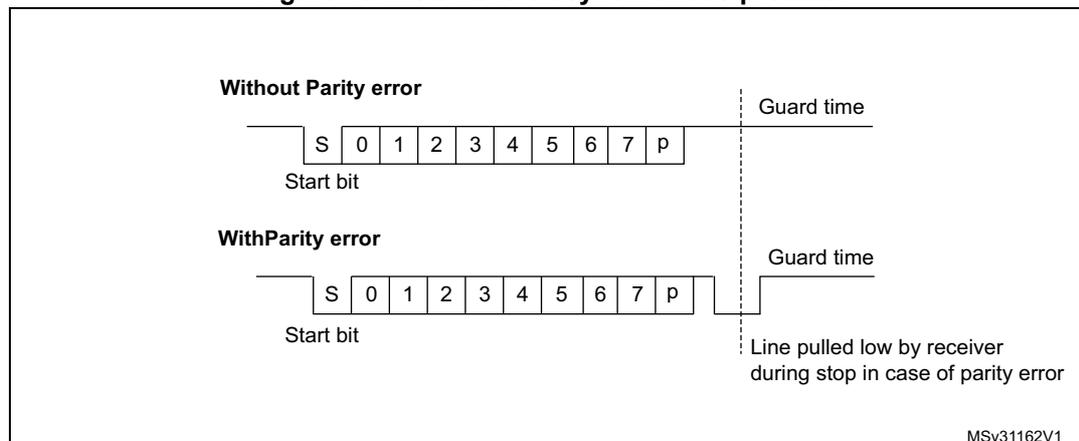
In T = 0 (character) mode, the parity error is indicated at the end of each character during the guard time period.
Figure 434 shows examples of what can be seen on the data line with and without parity error.
Figure 434. ISO 7816-3 asynchronous protocol
When connected to a smartcard, the TX output of the USART drives a bidirectional line that is also driven by the smartcard. The TX pin must be configured as open drain.
Smartcard mode implements a single wire half duplex communication protocol.
- • Transmission of data from the transmit shift register is guaranteed to be delayed by a minimum of 1/2 baud clock. In normal operation a full transmit shift register starts shifting on the next baud clock edge. In smartcard mode this transmission is further delayed by a guaranteed 1/2 baud clock.
- • In transmission, if the smartcard detects a parity error, it signals this condition to the USART by driving the line low (NACK). This NACK signal (pulling transmit line low for 1 baud clock) causes a framing error on the transmitter side (configured with 1.5 stop bits). The USART can handle automatic re-sending of data according to the protocol.
The number of retries is programmed in the SCARCNT bitfield. If the USART continues receiving the NACK after the programmed number of retries, it stops transmitting and signals the error as a framing error. The TXE bit (TXFNF bit in case FIFO mode is enabled) may be set using the TXFRQ bit in the USART_RQR register.
- • Smartcard auto-retry in transmission: A delay of 2.5 baud periods is inserted between the NACK detection by the USART and the start bit of the repeated character. The TC bit is set immediately at the end of reception of the last repeated character (no guard time). If the software wants to repeat it again, it must ensure the minimum 2-baud periods required by the standard.
- • If a parity error is detected during reception of a frame programmed with a 1.5 stop bit period, the transmit line is pulled low for a baud clock period after the completion of the receive frame. This is to indicate to the smartcard that the data transmitted to the USART has not been correctly received. A parity error is NACKed by the receiver if the NACK control bit is set, otherwise a NACK is not transmitted (to be used in T = 1 mode). If the received character is erroneous, the RXNE (RXFNE in case FIFO mode is enabled)/receive DMA request is not activated. According to the protocol specification, the smartcard must resend the same character. If the received character is still erroneous after the maximum number of retries specified in the SCARCNT bitfield, the USART stops transmitting the NACK and signals the error as a parity error.
- • Smartcard auto-retry in reception: the BUSY flag remains set if the USART NACKs the card but the card doesn't repeat the character.
- • In transmission, the USART inserts the guard time (as programmed in the guard time register) between two successive characters. As the guard time is measured after the stop bit of the previous character, the GT[7:0] register must be programmed to the desired CGT character guard time, as defined by the 7816-3 specification) minus 12 (the duration of one character).
- • The assertion of the TC flag can be delayed by programming the guard time register. In normal operation, TC is asserted when the transmit shift register is empty and no further transmit requests are outstanding. In smartcard mode an empty transmit shift register triggers the guard time counter to count up to the programmed value in the guard time register. TC is forced low during this time. When the guard time counter reaches the programmed value TC is asserted high. The TCBGT flag can be used to detect the end of data transfer without waiting for guard time completion. This flag is set just after the end of frame transmission and if no NACK has been received from the card.
- • The de-assertion of TC flag is unaffected by smartcard mode.
- • If a framing error is detected on the transmitter end (due to a NACK from the receiver), the NACK is not detected as a start bit by the receive block of the transmitter. According to the ISO protocol, the duration of the received NACK can be 1 or 2 baud clock periods.
- • On the receiver side, if a parity error is detected and a NACK is transmitted the receiver does not detect the NACK as a start bit.
Note: Break characters are not significant in smartcard mode. A 0x00 data with a framing error is treated as data and not as a break.
No Idle frame is transmitted when toggling the TE bit. The Idle frame (as defined for the other configurations) is not defined by the ISO protocol.
Figure 435 shows how the NACK signal is sampled by the USART. In this example the USART is transmitting data and is configured with 1.5 stop bits. The receiver part of the USART is enabled in order to check the integrity of the data and the NACK signal.
Figure 435. Parity error detection using the 1.5 stop bits
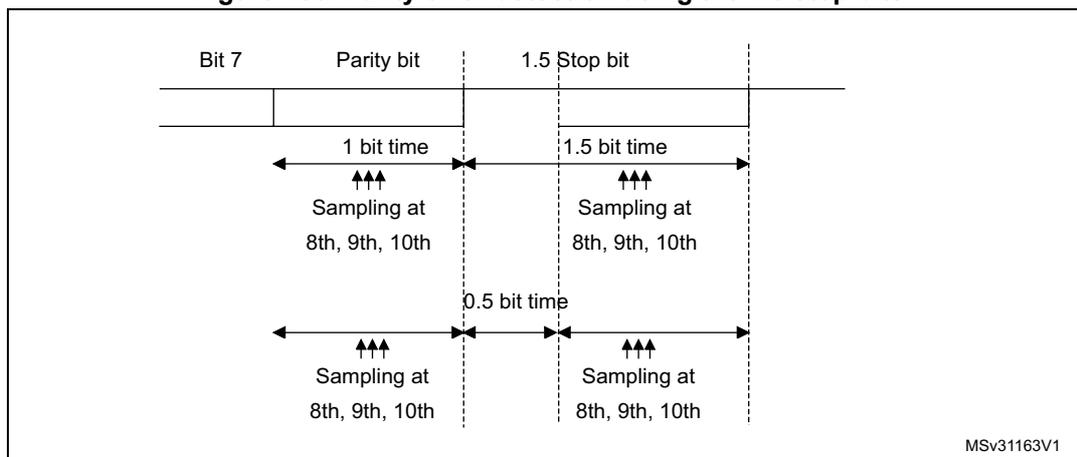
The diagram illustrates sampling points for parity and stop bits. In the upper sequence, the Parity bit has a duration of '1 bit time' and is sampled at the 8th, 9th, and 10th clock cycles. The '1.5 Stop bit' follows with a duration of '1.5 bit time', also sampled at the 8th, 9th, and 10th cycles. In the lower sequence, a '0.5 bit time' interval is shown between the Parity bit sampling and the Stop bit sampling, both of which are sampled at the 8th, 9th, and 10th cycles.
The USART can provide a clock to the smartcard through the CK output. In smartcard mode, CK is not associated to the communication but is simply derived from the internal peripheral input clock through a 5-bit prescaler. The division ratio is configured in the USART_GTPR register. CK frequency can be programmed from \( \text{usart\_ker\_ck\_pres}/2 \) to \( \text{usart\_ker\_ck\_pres}/62 \) , where \( \text{usart\_ker\_ck\_pres} \) is the peripheral input clock divided by a programmed prescaler.
Block mode ( \( T = 1 \) )
In \( T = 1 \) (block) mode, the parity error transmission can be deactivated by clearing the NACK bit in the USART_CR3 register.
When requesting a read from the smartcard, in block mode, the software must program the RTOR register to the BWT (block wait time) – 11 value. If no answer is received from the card before the expiration of this period, a timeout interrupt is generated. If the first character is received before the expiration of the period, it is signaled by the RXNE/RXFNE interrupt.
Note: The RXNE/RXFNE interrupt must be enabled even when using the USART in DMA mode to read from the smartcard in block mode. In parallel, the DMA must be enabled only after the first received byte.
After the reception of the first character (RXNE/RXFNE interrupt), the RTO register must be programmed to the CWT (character wait time – 11 value), in order to enable the automatic check of the maximum wait time between two consecutive characters. This time is expressed in baud time units. If the smartcard does not send a new character in less than the CWT period after the end of the previous character, the USART signals it to the software through the RTOF flag and interrupt (when RTOIE bit is set).
Note: As in the smartcard protocol definition, the BWT/CWT values must be defined from the beginning (start bit) of the last character. The RTO register must be programmed to \( \text{BWT} - 11 \) or \( \text{CWT} - 11 \) , respectively, taking into account the length of the last character itself.
A block length counter is used to count all the characters received by the USART. This counter is reset when the USART is transmitting. The length of the block is communicated by the smartcard in the third byte of the block (prologue field). This value must be programmed to the BLEN field in the USART_RTOR register. When using DMA mode, before the start of the block, this register field must be programmed to the minimum value
(0x0). With this value, an interrupt is generated after the 4th received character. The software must read the LEN field (third byte), its value must be read from the receive buffer.
In interrupt driven receive mode, the length of the block may be checked by software or by programming the BLEN value. However, before the start of the block, the maximum value of BLEN (0xFF) may be programmed. The real value is programmed after the reception of the third character.
If the block is using the LRC longitudinal redundancy check (1 epilogue byte), the BLEN=LEN. If the block is using the CRC mechanism (2 epilog bytes), BLEN=LEN+1 must be programmed. The total block length (including prologue, epilogue and information fields) equals BLEN+4. The end of the block is signaled to the software through the EOBF flag and interrupt (when EOBI bit is set).
In case of an error in the block length, the end of the block is signaled by the RTO interrupt (Character Wait Time overflow).
Note: The error checking code (LRC/CRC) must be computed/verified by software.
Direct and inverse convention
The smartcard protocol defines two conventions: direct and inverse.
The direct convention is defined as: LSB first, logical bit value of 1 corresponds to a H state of the line and parity is even. In order to use this convention, the following control bits must be programmed: MSBFIRST = 0, DATAINV = 0 (default values).
The inverse convention is defined as: MSB first, logical bit value 1 corresponds to an L state on the signal line and parity is even. In order to use this convention, the following control bits must be programmed: MSBFIRST = 1, DATAINV = 1.
Note: When logical data values are inverted (0 = H, 1 = L), the parity bit is also inverted in the same way.
In order to recognize the card convention, the card sends the initial character, TS, as the first character of the ATR (Answer To Reset) frame. The two possible patterns for the TS are: LHHL LLL LLH and LHHL HHH LLH.
- • (H) LHHL LLL LLH sets up the inverse convention: state L encodes value 1 and moment 2 conveys the most significant bit (MSB first). When decoded by inverse convention, the conveyed byte is equal to '3F'.
- • (H) LHHL HHH LLH sets up the direct convention: state H encodes value 1 and moment 2 conveys the least significant bit (LSB first). When decoded by direct convention, the conveyed byte is equal to '3B'.
Character parity is correct when there is an even number of bits set to 1 in the nine moments 2 to 10.
As the USART does not know which convention is used by the card, it needs to be able to recognize either pattern and act accordingly. The pattern recognition is not done in hardware, but through a software sequence. Moreover, supposing that the USART is configured in direct convention (default) and the card answers with the inverse convention, TS = LHHL LLL LLH \( \geq \) the USART received character is equal to 03 and the parity is odd.
Therefore, two methods are available for TS pattern recognition:
Method 1
The USART is programmed in standard smartcard mode/direct convention. In this case, the TS pattern reception generates a parity error interrupt and error signal to the card.
- • The parity error interrupt informs the software that the card did not answer correctly in direct convention. Software then reprograms the USART for inverse convention
- • In response to the error signal, the card retries the same TS character, and it is correctly received this time, by the reprogrammed USART
Alternatively, in answer to the parity error interrupt, the software may decide to reprogram the USART and to also generate a new reset command to the card, then wait again for the TS.
Method 2
The USART is programmed in 9-bit/no-parity mode, no bit inversion. In this mode it receives any of the two TS patterns as:
(H) LHHL LLL LLH = 0x103: inverse convention to be chosen
(H) LHHL HHH LLH = 0x13B: direct convention to be chosen
The software checks the received character against these two patterns and, if any of them match, then programs the USART accordingly for the next character reception.
If none of the two is recognized, a card reset may be generated in order to restart the negotiation.
39.5.19 USART IrDA SIR ENDEC block
This section is relevant only when IrDA mode is supported. Refer to Section 39.4: USART implementation .
IrDA mode is selected by setting the IREN bit in the USART_CR3 register. In IrDA mode, the following bits must be kept cleared:
- • LINEN, STOP and CLKEN bits in the USART_CR2 register,
- • SCEN and HDSEL bits in the USART_CR3 register.
The IrDA SIR physical layer specifies the use of a return-to-zero, inverted (RZI) modulation scheme that represents logic 0 as an infrared light pulse (see Figure 436 ).
The encoding and decoding of data in IrDA mode is handled by hardware blocks.
Even if IrDA is a half-duplex protocol, it requires two pins for transmission and reception (USART_TX and USART_RX).
The SIR transmit encoder modulates the non return-to-zero (NRZ) transmit bit stream output from USART. The output pulse stream is transmitted to an external output driver and infrared LED. USART supports only bit rates up to 115.2 kbauds for the SIR ENDEC. In normal mode the transmitted pulse width is specified as 3/16 of a bit period.
The SIR receive decoder demodulates the return-to-zero bit stream from the infrared detector and outputs the received NRZ serial bit stream to the USART. The decoder input is normally high (marking state) in the Idle state. The transmit encoder output has the opposite polarity to the decoder input. A start bit is detected when the decoder input is low.
- • IrDA is a half duplex communication protocol. If the Transmitter is busy (when the USART is sending data to the IrDA encoder), any data on the IrDA receive line is
ignored by the IrDA decoder and if the Receiver is busy (when the USART is receiving decoded data from the USART), data on the TX from the USART to IrDA is not encoded. While receiving data, transmission must be avoided as the data to be transmitted may be corrupted.
- • A 0 is transmitted as a high pulse and a 1 is transmitted as a 0. The width of the pulse is specified as \( 3/16 \) th of the selected bit period in normal mode (see Figure 437 ).
- • The SIR decoder converts the IrDA compliant receive signal into a bit stream for USART.
- • The SIR receive logic interprets a high state as a logic one and low pulses as logic zeros.
- • The transmit encoder output has the opposite polarity to the decoder input. The SIR output is in low state when Idle.
- • The IrDA specification requires the acceptance of pulses greater than 1.41 µs. The acceptable pulse width is programmable. Glitch detection logic on the receiver end filters out pulses of width less than two periods, where the period equals \( PSC / usart\_ker\_ck\_pres \) (PSC being the prescaler value programmed in the PSC[7:0] bitfield of the USART_GTPR register). Pulses of width less than one period are always rejected, but those of width greater than one and less than two periods may be accepted or rejected, those greater than two periods are accepted as a pulse. The IrDA encoder/decoder does not work when \( PSC = 0 \) .
- • The receiver can communicate with a low-power transmitter.
- • In IrDA mode, the stop bits in the USART_CR2 register must be configured to 1 stop bit.
IrDA low-power mode
- • Transmitter
In low-power mode, the pulse width is not maintained at \( 3 / 16 \) of the bit period. Instead, the width of the pulse is three times the IrDA low-power period. The IrDA low-power frequency minimum value is 1.42 MHz. Generally, this value is 1.8432 MHz ( \( 1.42\text{ MHz} < \text{IrDA low-power frequency} < 2.12\text{ MHz} \) ). A low-power mode programmable divisor divides the system clock to achieve this value.
- • Receiver
Receiving in low-power mode is similar to receiving in normal mode. For glitch detection the USART must discard pulses of duration shorter than one IrDA low-power period. A valid low is accepted only if its duration is greater than two IrDA low-power periods.
Note: IrDA low-power period = \( PSC / usart\_ker\_ck\_pres \) , where PSC corresponds to the value programmed in the PSC[7:0] bitfield of the USART_GTPR register.
A pulse of width less than two and greater than one IrDA low-power period may or may not be rejected.
The receiver set-up time must be managed by software. The IrDA physical layer specification specifies a minimum of 10 ms delay between transmission and reception.
Figure 436. IrDA SIR ENDEC block diagram
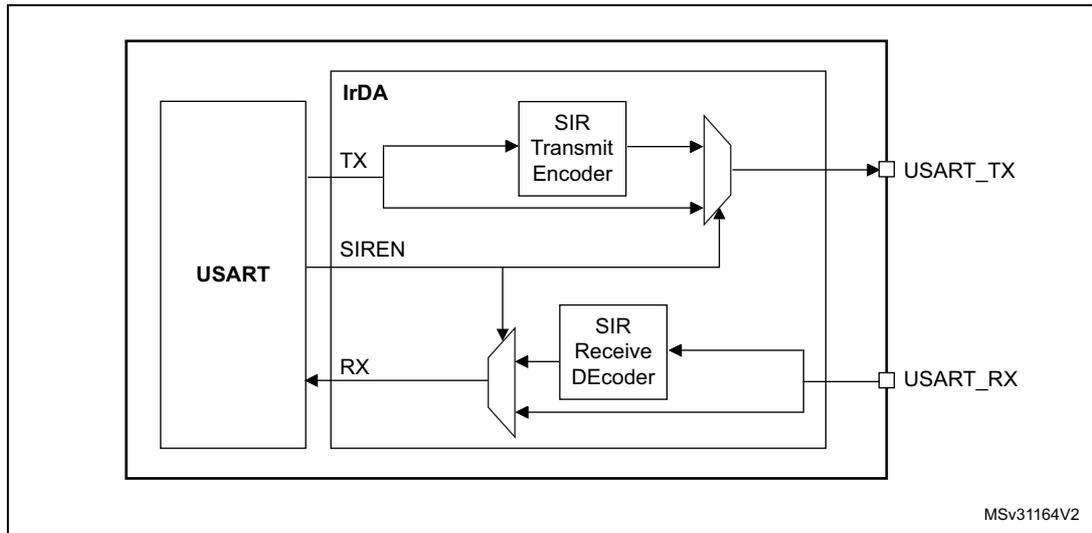
The diagram illustrates the internal architecture of the USART for IrDA SIR mode. A central 'USART' block is connected to 'TX' and 'RX' pins. The 'TX' path includes an 'IrDA' block and a 'SIR Transmit Encoder' which drives a multiplexer outputting to 'USART_TX'. The 'RX' path includes a multiplexer receiving from 'USART_RX', a 'SIR Receive DEncoder', and an 'IrDA' block. A 'SIREN' control signal is shown. The diagram is labeled MSv31164V2.
Figure 437. IrDA data modulation (3/16) - normal mode
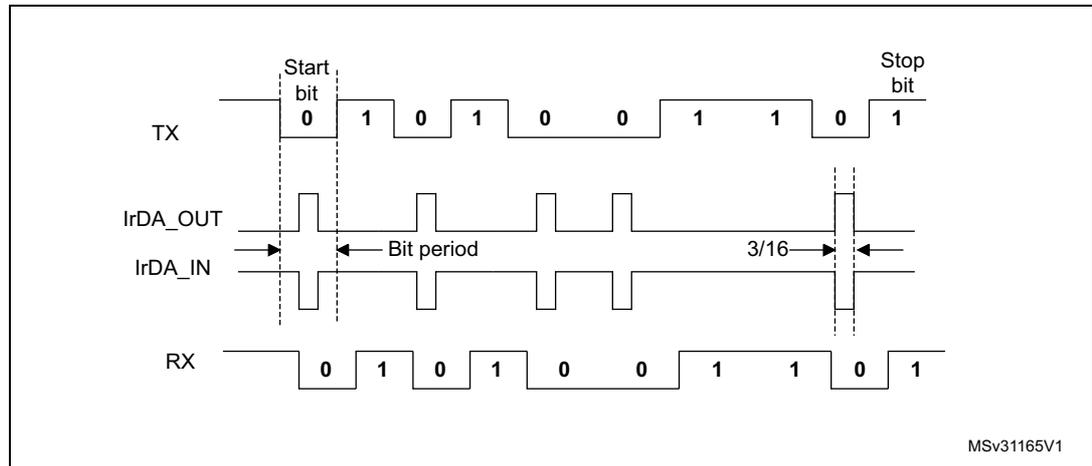
This timing diagram shows the relationship between the TX data, the IrDA_OUT signal, the IrDA_IN signal, and the RX data. The TX data is a byte 01010011 with a start bit (0) and a stop bit (1). The IrDA_OUT signal is a modulated version of the TX data. The IrDA_IN signal is the received modulated signal. The RX data is the decoded version of the IrDA_IN signal. The diagram indicates the 'Bit period' and a '3/16' ratio. The diagram is labeled MSv31165V1.
| Signal | Start bit | Bit 0 | Bit 1 | Bit 2 | Bit 3 | Bit 4 | Bit 5 | Bit 6 | Bit 7 | Stop bit |
|---|---|---|---|---|---|---|---|---|---|---|
| TX | 0 | 1 | 0 | 1 | 0 | 0 | 1 | 1 | 0 | 1 |
| IrDA_OUT | [Modulated waveform] | |||||||||
| IrDA_IN | [Modulated waveform] | |||||||||
| RX | 0 | 1 | 0 | 1 | 0 | 0 | 1 | 1 | 0 | 1 |
39.5.20 Continuous communication using USART and DMA
The USART is capable of performing continuous communications using the DMA. The DMA requests for Rx buffer and Tx buffer are generated independently.
Note: Refer to Section 39.4: USART implementation to determine if the DMA mode is supported. If DMA is not supported, use the USART as explained in Section 39.5.7 . To perform continuous communications when the FIFO is disabled, clear the TXE/ RXNE flags in the USART_ISR register.
Transmission using DMA
DMA mode can be enabled for transmission by setting the DMAT bit in the USART_CR3 register. Data are loaded from an SRAM area configured using the DMA peripheral (refer to section direct memory access controller (DMA) ) to the USART_TDR register whenever the TXE flag (TXFNF flag if FIFO mode is enabled) is set. To map a DMA channel for USART transmission, use the following procedure (x denotes the channel number):
- 1. Write the USART_TDR register address in the DMA control register to configure it as the destination of the transfer. The data is moved to this address from memory after each TXE (or TXFNF if FIFO mode is enabled) event.
- 2. Write the memory address in the DMA control register to configure it as the source of the transfer. The data is loaded into the USART_TDR register from this memory area after each TXE (or TXFNF if FIFO mode is enabled) event.
- 3. Configure the total number of bytes to be transferred to the DMA control register.
- 4. Configure the channel priority in the DMA register
- 5. Configure DMA interrupt generation after half/ full transfer as required by the application.
- 6. Clear the TC flag in the USART_ISR register by setting the TCCF bit in the USART_ICR register.
- 7. Activate the channel in the DMA register.
When the number of data transfers programmed in the DMA controller is reached, the DMA controller generates an interrupt on the DMA channel interrupt vector.
In transmission mode, once the DMA has written all the data to be transmitted (DMA transfer complete), the TC flag can be monitored to make sure that the USART communication has completed. This is required to avoid corrupting the last transmission before disabling the USART or before the system enters a low-power mode when the peripheral clock is disabled. Software must wait until TC = 1. The TC flag remains cleared during all data transfers and it is set by hardware at the end of transmission of the last frame.
Note: The DMAT bit must not be cleared before the DMA end of transfer.
Figure 438. Transmission using DMA
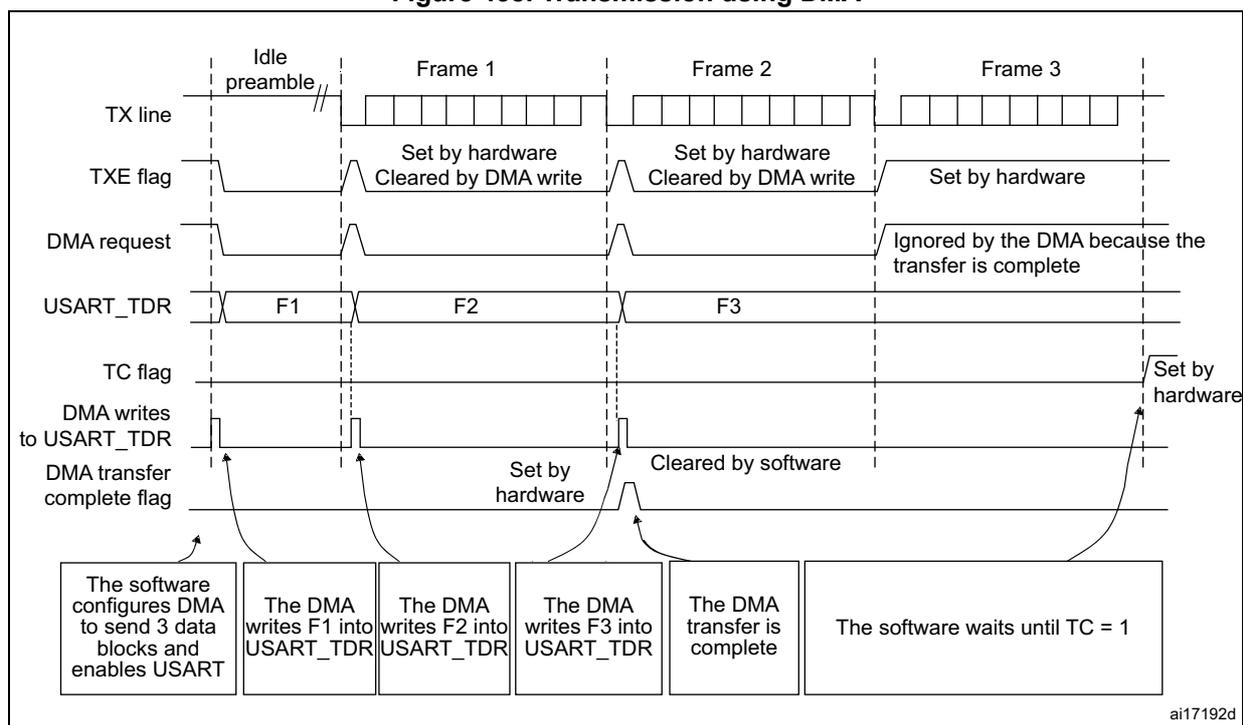
The diagram illustrates the sequence of events for USART transmission using DMA. It includes the following signal states and actions:
- TX line: Shows an idle preamble followed by three frames (Frame 1, Frame 2, Frame 3) of data. Each frame consists of 8 data blocks.
- TXE flag:
- Initial state: Idle.
- Before Frame 1: Set by hardware, cleared by DMA write.
- Before Frame 2: Set by hardware, cleared by DMA write.
- Before Frame 3: Set by hardware.
- DMA request:
- Initial state: Idle.
- Before Frame 1: Set by hardware.
- Before Frame 2: Set by hardware.
- Before Frame 3: Set by hardware.
- After Frame 3: Ignored by the DMA because the transfer is complete.
- USART_TDR:
- Initial state: F1 (Frame 1 data).
- After Frame 1: F2 (Frame 2 data).
- After Frame 2: F3 (Frame 3 data).
- TC flag:
- Initial state: Idle.
- After Frame 3: Set by hardware.
- DMA writes to USART_TDR:
- Initial state: The software configures DMA to send 3 data blocks and enables USART.
- Before Frame 1: The DMA writes F1 into USART_TDR.
- Before Frame 2: The DMA writes F2 into USART_TDR.
- Before Frame 3: The DMA writes F3 into USART_TDR.
- After Frame 3: The DMA transfer is complete.
- Final state: The software waits until TC = 1.
ai17192d
Note: When FIFO management is enabled, the DMA request is triggered by transmit FIFO not full (that is, TXFNF = 1).
Reception using DMA
DMA mode can be enabled for reception by setting the DMAR bit in the USART_CR3 register. Data are loaded from the USART_RDR register to an SRAM area configured using the DMA peripheral (refer to section direct memory access controller (DMA) ) whenever a data byte is received. To map a DMA channel for USART reception, use the following procedure:
- 1. Write the USART_RDR register address in the DMA control register to configure it as the source of the transfer. The data is moved from this address to the memory after each RXNE (RXFNE in case FIFO mode is enabled) event.
- 2. Write the memory address in the DMA control register to configure it as the destination of the transfer. The data is loaded from USART_RDR to this memory area after each RXNE (RXFNE in case FIFO mode is enabled) event.
- 3. Configure the total number of bytes to be transferred to the DMA control register.
- 4. Configure the channel priority in the DMA control register
- 5. Configure interrupt generation after half/ full transfer as required by the application.
- 6. Activate the channel in the DMA control register.
When the number of data transfers programmed in the DMA controller is reached, the DMA controller generates an interrupt on the DMA channel interrupt vector.
Note: The DMAR bit must not be cleared before the DMA end of transfer.
Figure 439. Reception using DMA
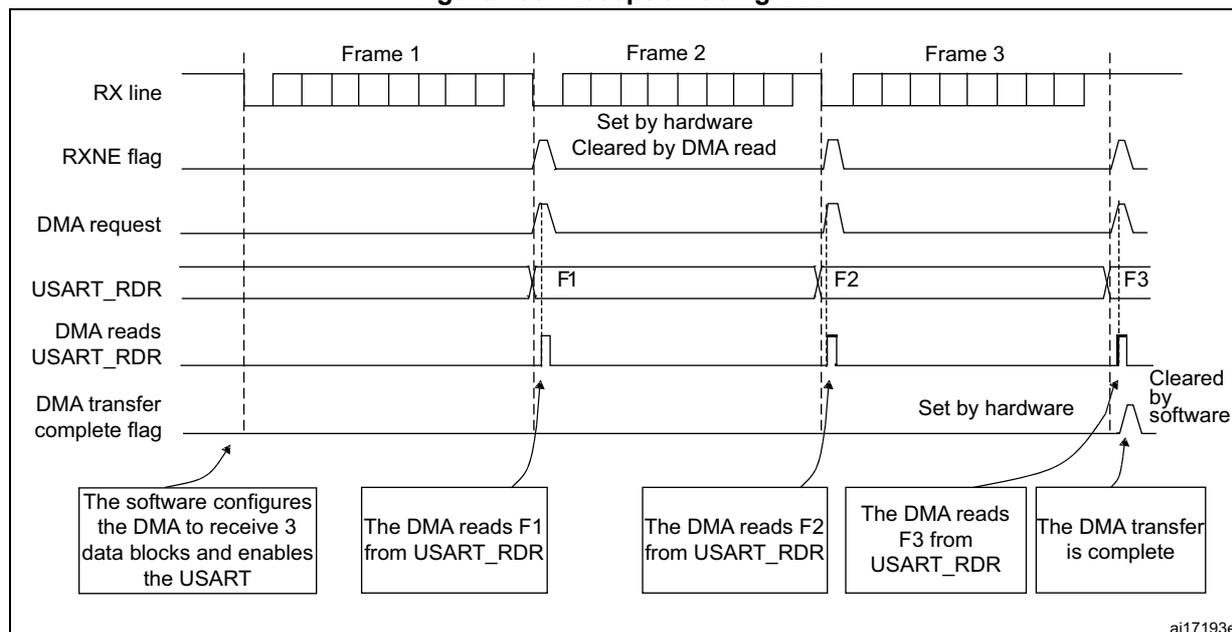
The diagram illustrates the timing for DMA reception of three frames. The RX line shows the incoming data for Frame 1, Frame 2, and Frame 3. The RXNE flag is set by hardware when the first byte of a frame is received and cleared by a DMA read. The DMA request is triggered by the RXNE flag. The USART_RDR register is read by the DMA for each frame (F1, F2, F3). The DMA transfer complete flag is set by hardware after the last byte of a frame is read and cleared by software. Callouts indicate that the software configures the DMA to receive 3 data blocks and enables the USART, and that the DMA reads each frame from the USART_RDR register.
Note: When FIFO management is enabled, the DMA request is triggered by receive FIFO not empty (that is, RXFNE = 1).
Error flagging and interrupt generation in multibuffer communication
If any error occurs during a transaction in multibuffer communication mode, the error flag is asserted after the current byte. An interrupt is generated if the interrupt enable flag is set. For framing error, overrun error and noise flag, which are asserted with RXNE (RXFNE in case FIFO mode is enabled) in single byte reception, there is a separate error flag interrupt enable bit (EIE bit in the USART_CR3 register), which, if set, enables an interrupt after the current byte if any of these errors occur.
39.5.21 RS232 hardware flow control and RS485 driver enable
It is possible to control the serial data flow between two devices by using the CTS input and the RTS output. The Figure 440 shows how to connect two devices in this mode:
Figure 440. Hardware flow control between two USARTs
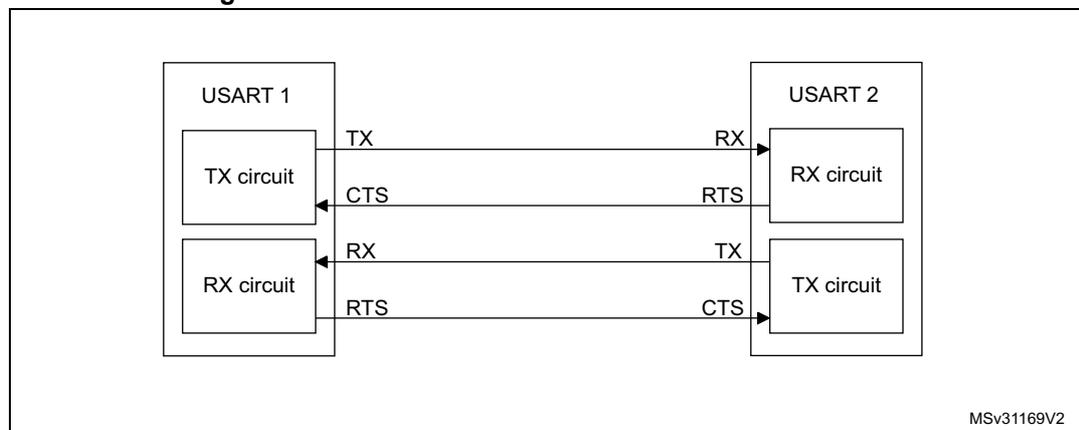
The diagram shows two USARTs, USART 1 and USART 2, connected via their TX and RX lines. USART 1's TX circuit is connected to USART 2's RX circuit, and USART 1's RX circuit is connected to USART 2's TX circuit. Flow control lines are also connected: USART 1's CTS input is connected to USART 2's RTS output, and USART 1's RTS output is connected to USART 2's CTS input.
RS232 RTS and CTS flow control can be enabled independently by writing the RTSE and CTSE bits to 1 in the USART_CR3 register.
RS232 RTS flow control
If the RTS flow control is enabled (RTSE = 1), then RTS is deasserted (tied low) as long as the USART receiver is ready to receive a new data. When the receive register is full, RTS is asserted, indicating that the transmission is expected to stop at the end of the current frame. Figure 441 shows an example of communication with RTS flow control enabled.
Figure 441. RS232 RTS flow control
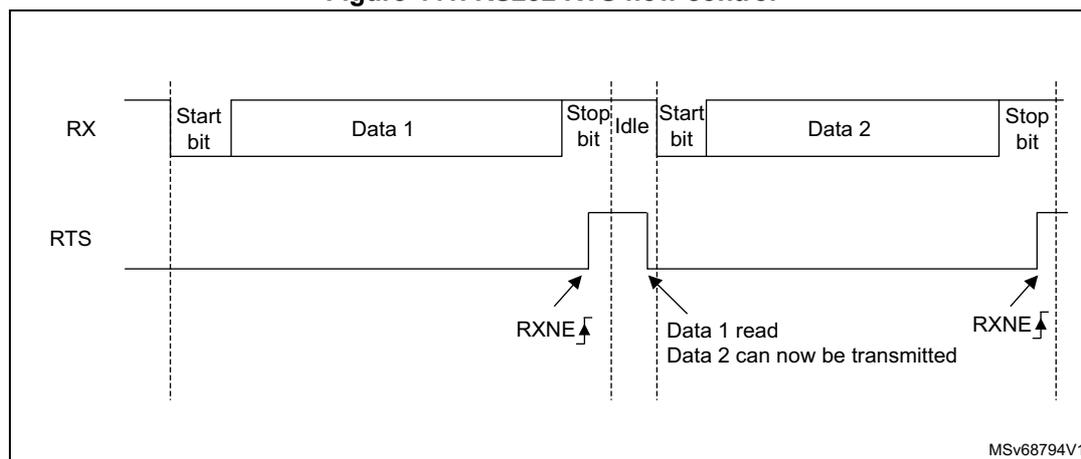
The diagram illustrates the relationship between the receive (RX) signal and the Request to Send (RTS) signal during two data transmissions. The RX signal shows two frames: the first contains 'Start bit', 'Data 1', and 'Stop bit'; the second contains 'Start bit', 'Data 2', and 'Stop bit'. An 'Idle' state is shown between the frames. The RTS signal is initially low. It transitions to high at the end of the first frame (after the stop bit) and remains high until the start of the second frame. At the end of the second frame, the RTS signal transitions back to low. Labels 'RXNE' with rising edge symbols indicate the receiver not empty flag being set at the end of each frame. A label 'Data 1 read' with a rising edge symbol indicates the point where the first data byte is read, at which point the RTS signal goes low, allowing the second frame to be transmitted. The diagram is labeled 'MSv68794V1' in the bottom right corner.
Note: When FIFO mode is enabled, RTS is asserted only when RXFIFO is full.
RS232 CTS flow control
If the CTS flow control is enabled (CTSE = 1), then the transmitter checks the CTS input before transmitting the next frame. If CTS is deasserted (tied low), then the next data is transmitted (assuming that data is to be transmitted, in other words, if TXE/TXFE = 0), else the transmission does not occur. When CTS is asserted during a transmission, the current transmission completes before the transmitter stops.
When CTSE = 1, the CTSIF status bit is automatically set by hardware as soon as the CTS input toggles. It indicates when the receiver becomes ready or not ready for communication. An interrupt is generated if the CTSIE bit in the USART_CR3 register is set. Figure 442 shows an example of communication with CTS flow control enabled.
Figure 442. RS232 CTS flow control
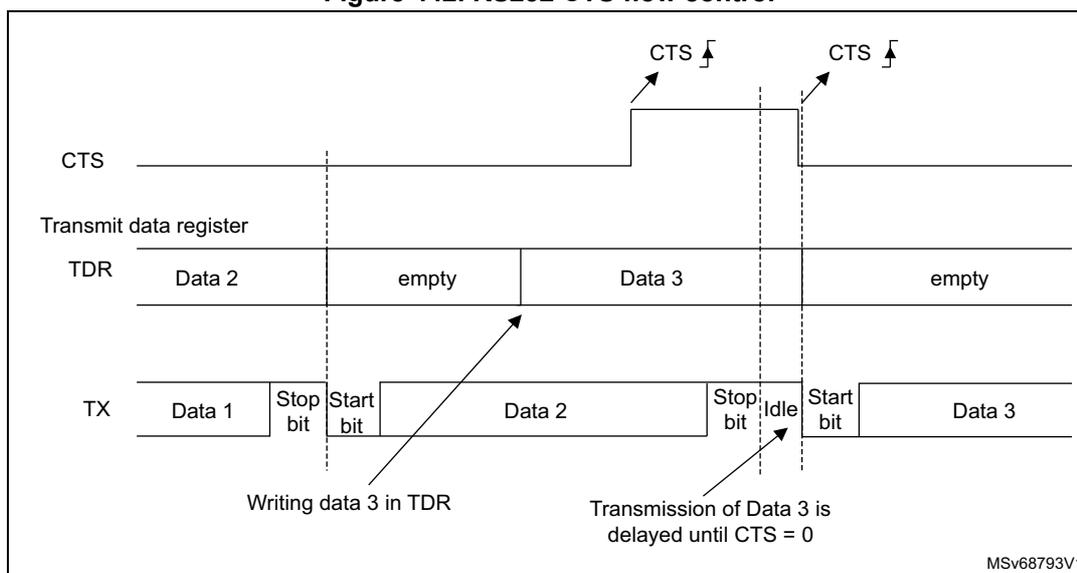
The diagram shows three horizontal timelines:
- CTS: The Clear To Send signal. It is initially high, then goes low when Data 2 is being transmitted, and returns high after Data 2 is complete. A label "CTS ↓" indicates the falling edge when it goes low, and "CTS ↑" indicates the rising edge when it goes high.
- Transmit data register (TDR): Shows the data to be transmitted. It contains "Data 2", then an "empty" state, then "Data 3", and then an "empty" state again.
- TX: The transmit line showing the actual data stream. It starts with "Data 1", followed by a "Stop bit", then a "Start bit" for "Data 2". After "Data 2", there is a "Stop bit" and an "Idle" state. When "Data 3" is written into the TDR (indicated by an arrow), the transmission of "Data 3" (starting with its "Start bit") is delayed because CTS is still low. Transmission of "Data 3" only begins after CTS goes high, following the completion of "Data 2".
Annotations in the diagram:
- "Writing data 3 in TDR" points to the "Data 3" entry in the TDR.
- "Transmission of Data 3 is delayed until CTS = 0" (Note: the diagram shows CTS going high to allow transmission, which contradicts the text "until CTS = 0" if active-low is assumed, but the diagram's logic is that transmission resumes when CTS is high).
- Reference code: MSV68793V1.
Note: For correct behavior, CTS must be deasserted at least three USART clock source periods before the end of the current character. In addition, it must be noted that the CTSCF flag may not be set for pulses shorter than \( 2 \times PCLK \) periods.
RS485 driver enable
The driver enable feature is enabled by setting bit DEM in the USART_CR3 control register. This enables the user to activate the external transceiver control, through the DE (driver enable) signal. The deassertion time is the time between the end of the last stop bit, in a transmitted message, and the de-activation of the DE signal. It is programmed using the DEDT [4:0] bitfields in the USART_CR1 control register. The polarity of the DE signal can be configured using the DEP bit in the USART_CR3 control register.
In USART, the DEAT and DEDT are expressed in sample time units (1/8 or 1/16 bit time, depending on the oversampling rate).
39.5.22 USART autonomous mode
The USART peripheral can be functional in Stop mode thanks to the autonomous mode. This mode can also be used in Run and Sleep mode. The UESM bit must be set prior to entering low-power mode.
The APB clock is requested by the peripheral each time the USART status needs to be updated. Once the USART receives the APB clock, it generates either an interrupt or a DMA request, depending on the peripheral configuration.
If an interrupt is generated, the device wakes up from Stop mode. If no interrupt is generated, the device remains in Stop mode but the kernel and APB clocks are still available for the USART and all the autonomous peripherals enabled in the reset and clock controller (RCC). If DMA requests are enabled, the data are directly transferred to/from the SRAM thanks to the DMA while the product remains in Stop mode.
USART transmission mode
In transmission, the APB clock is requested only when the TE bit is set and in the following cases:
- • If the FIFO mode is enabled, the APB clock is requested when
- – The TxFIFO is empty (TXFE = 1) and the corresponding interrupt is enabled (TXFEIE = 1)
- – The TxFIFO threshold is reached (TXFT = 1) and the corresponding interrupt is enabled (TXFTIE = 1)
- – The TxFIFO is not full (TXFNF = 1) and the corresponding interrupt or DMA is enabled (TXFNFIE = 1 or DMAT = 1)
- • If the FIFO mode is disabled, the APB clock is requested as soon as data are transferred to the shift register. The DMA or associated interrupt must be enabled.
The TE bit is set by hardware if an asynchronous trigger is detected.
A transmission is automatically launched when an asynchronous trigger is detected in Run, Sleep, or Stop mode. The trigger is selected through the TRIGSEL bit in the USART_AUTOOCR register. It sets the TE bit in the USART_CR1 register and generates an APB clock request to enable the transfer. The APB clock is requested until the transmission completes and the TE bit is cleared by hardware when the programmed number of data to be transmitted (TDN bitfield in the USART_AUTOOCR register) is reached. In this case, the TC flag is set when the number of data to be transmitted is reached and the last byte is transmitted.
USART reception mode
- • If the FIFO mode is enabled, the APB clock is requested when
- – The RxFIFO is full (RXFF = 1) and the corresponding interrupt is enabled (RXFFIE = 1)
- – The RxFIFO threshold is reached (RXFT = 1) and the corresponding interrupt is enabled (RXFTIE = 1)
- – The RxFIFO is not empty (RXFNE = 1) and the corresponding interrupt or DMA is enabled (RXFNEIE = 1 or DMAR = 1)
- • If the FIFO mode is disabled, the APB clock is requested when the USART finishes sampling data and it is ready to be written in the USART_RDR. The DMA or the associated interrupt must be enabled.
Note: The APB clock is requested in reception mode when an overrun error occurs (ORE = 1). The EIE bit must be set to enable the generation of an interrupt and waking up the MCU, and the OVRDIS bit must remain cleared. The APB clock request is kept until the interrupt flag is cleared.
The APB clock is also requested in reception mode when a Parity/Noise/Framing error occurs and the DMA is used for reception. The APB clock request is kept until the interrupt flag is cleared.
Only UART and SPI master modes support the autonomous mode.
Determining the maximum USART baud rate that enables to correctly wake up the microcontroller from low-power mode
The maximum baud rate that enables to correctly wake up the microcontroller from low-power mode depends on the wake-up time parameter (refer to the device datasheet) and on the USART receiver tolerance (see Section 39.5.9: Tolerance of the USART receiver to clock deviation ).
Let us take the example of OVER8 = 0, M bits = 01, ONEBIT = 0 and BRR [3:0] = 0000.
In these conditions, according to Table 379: Tolerance of the USART receiver when BRR [3:0] = 0000 , the USART receiver tolerance equals 3.41%.
where \( t_{WUUSART} \) is the wake-up time from low-power mode.
If we consider the ideal case where DTRA, DQUANT, DREC, and DTCL parameters are at 0%, the maximum value of DWU is 3.41%. In fact, we need to consider at least the
usart_ker_ck
inaccuracy (DREC).
For example, if HSI is used as
usart_ker_ck
, and the HSI inaccuracy is of 1%, then we obtain:
\( t_{WUUSART} = 3 \mu\text{s} \) (values provided only as examples; for correct values, refer to the device datasheet).
As a result, the maximum baud rate enables to wake up correctly from low-power mode is: \( 1/11.32 \mu\text{s} = 88.36 \text{ kbauds} \) .
39.6 USART in low-power modes
Table 382. Effect of low-power modes on the USART
| Mode | Description |
|---|---|
| Sleep | No effect. USART interrupts cause the device to exit Sleep mode. |
| Stop (1) | The content of the USART registers is kept. If the USART is clocked by an oscillator available in Stop mode, transfers in asynchronous and SPI master modes are functional. DMA requests are functional, and the interrupts cause the device to exit Stop mode. |
| Standby | The USART peripheral is powered down and must be reinitialized after exiting Standby mode. |
- Refer to Section 39.4 to know if the wake-up from Stop mode is supported for a given peripheral instance. If an instance is not functional in a given Stop mode, it must be disabled before entering this Stop mode.
39.7 USART interrupts
Refer to Table 383 for a detailed description of all USART interrupt requests.
Table 383. USART interrupt requests
| Interrupt vector | Interrupt event | Event flag | Enable Control bit | Interrupt clear method | Exit from Sleep mode | Exit from Stop (1) modes | Exit from Standby mode |
|---|---|---|---|---|---|---|---|
| USART or UART | Transmit data register empty | TXE | TXEIE | Write TDR | Yes | Yes | No |
| Transmit FIFO not full | TXFNF | TXFNFIE | TXFIFO full | Yes | |||
| Transmit FIFO empty | TXFE | TXFEIE | Write TDR or write 1 in TXFRQ | Yes | |||
| Transmit FIFO threshold reached | TXFT | TXFTIE | Write TDR (2) | Yes | |||
| CTS interrupt | CTSIF | CTSIE | Write 1 in CTSCF | No | |||
| Transmission complete | TC | TCIE | Write TDR or write 1 in TCCF | Yes | |||
| Transmission complete before guard time | TCBGT | TCBGTIE | Write TDR or write 1 in TCBGT | No |
Table 383. USART interrupt requests (continued)
| Interrupt vector | Interrupt event | Event flag | Enable Control bit | Interrupt clear method | Exit from Sleep mode | Exit from Stop (1) modes | Exit from Standby mode |
|---|---|---|---|---|---|---|---|
| USART or UART | Receive data register not empty (data ready to be read) | RXNE | RXNEIE | Read RDR or write 1 in RXFRQ | Yes | Yes | No |
| Receive FIFO not empty | RXFNE | RXFNEIE | Read RDR until RXFIFO empty or write 1 in RXFRQ | Yes | |||
| Receive FIFO full | RXFF (3) | RXFFIE | Read RDR | Yes | |||
| Receive FIFO threshold reached | RXFT | RXFTIE | Read RDR | Yes | |||
| Overrun error detected | ORE | RX-NEIE/RX-FNEIE | Write 1 in ORECF | Yes | |||
| Idle line detected | IDLE | IDLEIE | Write 1 in IDLECF | No | |||
| Parity error | PE | PEIE | Write 1 in PECF | Yes (4) | |||
| LIN break | LBDF | LBDIE | Write 1 in LBDCF | No | |||
| Noise error in multibuffer communication. | NE | EIE | Write 1 in NFCF | Yes (4) | |||
| Overrun error in multibuffer communication. | ORE (5) | Write 1 in ORECF | Yes | ||||
| Framing error in multibuffer communication. | FE | Write 1 in FECF | Yes (4) | ||||
| Character match | CMF | CMIE | Write 1 in CMCF | Yes (6) | |||
| Receiver timeout | RTOF | RTOFIE | Write 1 in RTOCCF | No | |||
| End of Block | EOBF | EOBIE | Write 1 in EOBCF | No | |||
| SPI slave underrun error | UDR | EIE | Write 1 in UDRCF | No |
1. The USART can wake up the device from Stop mode only if the peripheral instance supports the wake-up from Stop mode feature. Refer to Section 39.4: USART implementation for the list of supported Stop modes.
2. Writing to TDR clears the TXFT flag only if the number of empty locations is less than the value programmed in TXFTCFG[2:0].
3. RXFF flag is asserted if the USART receives n+1 data (n being the RXFIFO size): n data in the RXFIFO and 1 data in USART_RDR. In Stop mode, USART_RDR is not clocked. As a result, this register is not written and once n data are received and written in the RXFIFO, the RXFF interrupt is asserted (RXFF flag is not set).
4. Parity/Noise/Framing error interrupts enable waking up from Stop modes when the DMA is used.
5. When OVRDIS = 0.
6. The DMA must be used when the FIFO mode is enabled.
39.8 USART registers
Refer to Section 1.2 for a list of abbreviations used in register descriptions.
The peripheral registers have to be accessed by words (32 bits).
39.8.1 USART control register 1 (USART_CR1)
Address offset: 0x00
Reset value: 0x0000 0000
The same register can be used in FIFO mode enabled (this section) and FIFO mode disabled (next section).
FIFO mode enable, FIFOEN = 1
| 31 | 30 | 29 | 28 | 27 | 26 | 25 | 24 | 23 | 22 | 21 | 20 | 19 | 18 | 17 | 16 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| RXF FIE | TXFEIE | FIFO EN | M1 | EOBIE | RTOIE | DEAT[4:0] | DEDT[4:0] | ||||||||
| rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw |
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| OVER8 | CMIE | MME | M0 | WAKE | PCE | PS | PEIE | TXFNIE | TCIE | RXFNEIE | IDLEIE | TE | RE | UESM | UE |
| rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw |
Bit 31 RXFFIE : RXFIFO Full interrupt enable
This bit is set and cleared by software.
0: Interrupt inhibited
1: USART interrupt generated when RXFF = 1 in the USART_ISR register
Bit 30 TXFEIE : TXFIFO empty interrupt enable
This bit is set and cleared by software.
0: Interrupt inhibited
1: USART interrupt generated when TXFE = 1 in the USART_ISR register
Bit 29 FIFOEN : FIFO mode enable
This bit is set and cleared by software.
0: FIFO mode is disabled.
1: FIFO mode is enabled.
This bitfield can only be written when the USART is disabled (UE = 0).
Note: FIFO mode can be used on standard UART communication, in SPI master/slave mode and in smartcard modes only. It must not be enabled in IrDA and LIN modes.
Bit 28 M1 : Word length
This bit must be used in conjunction with bit 12 (M0) to determine the word length. It is set or cleared by software.
M[1:0] = 00: 1 start bit, 8 Data bits, n stop bits
M[1:0] = 01: 1 start bit, 9 Data bits, n stop bits
M[1:0] = 10: 1 start bit, 7 Data bits, n stop bits
This bit can only be written when the USART is disabled (UE = 0).
Note: In 7-bits data length mode, the smartcard mode, LIN master mode and auto baud rate (0x7F and 0x55 frames detection) are not supported.
Bit 27 EOBIE: End of block interrupt enableThis bit is set and cleared by software.
0: Interrupt inhibited
1: USART interrupt generated when the EOBF flag is set in the USART_ISR register
Note: If the USART does not support smartcard mode, this bit is reserved and must be kept at reset value. Refer to Section 39.4: USART implementation .
Bit 26 RTOIE: Receiver timeout interrupt enableThis bit is set and cleared by software.
0: Interrupt inhibited
1: USART interrupt generated when the RTOF bit is set in the USART_ISR register.
Note: If the USART does not support the Receiver timeout feature, this bit is reserved and must be kept at reset value. Section 39.4: USART implementation .
Bits 25:21 DEAT[4:0]: Driver Enable assertion timeThis 5-bit value defines the time between the activation of the DE (Driver Enable) signal and the beginning of the start bit. It is expressed in sample time units (1/8 or 1/16 bit time, depending on the oversampling rate).
This bitfield can only be written when the USART is disabled (UE = 0).
Note: If the Driver Enable feature is not supported, this bit is reserved and must be kept at reset value. Refer to Section 39.4: USART implementation .
Bits 20:16 DEDT[4:0]: Driver Enable deassertion timeThis 5-bit value defines the time between the end of the last stop bit, in a transmitted message, and the de-activation of the DE (Driver Enable) signal. It is expressed in sample time units (1/8 or 1/16 bit time, depending on the oversampling rate).
If the USART_TDR register is written during the DEDT time, the new data is transmitted only when the DEDT and DEAT times have both elapsed.
This bitfield can only be written when the USART is disabled (UE = 0).
Note: If the Driver Enable feature is not supported, this bit is reserved and must be kept at reset value. Refer to Section 39.4: USART implementation .
Bit 15 OVER8: Oversampling mode0: Oversampling by 16
1: Oversampling by 8
This bit can only be written when the USART is disabled (UE = 0).
Note: In LIN, IrDA and smartcard modes, this bit must be kept cleared.
Bit 14 CMIE: Character match interrupt enableThis bit is set and cleared by software.
0: Interrupt inhibited
1: USART interrupt generated when the CMF bit is set in the USART_ISR register.
Bit 13 MME: Mute mode enableThis bit enables the USART mute mode function. When set, the USART can switch between active and mute mode, as defined by the WAKE bit. It is set and cleared by software.
0: Receiver in active mode permanently
1: Receiver can switch between mute mode and active mode.
Bit 12 M0: Word lengthThis bit is used in conjunction with bit 28 (M1) to determine the word length. It is set or cleared by software (refer to bit 28 (M1) description).
This bit can only be written when the USART is disabled (UE = 0).
Bit 11 WAKE : Receiver wake-up methodThis bit determines the USART wake-up method from mute mode. It is set or cleared by software.
0: Idle line
1: Address mark
This bitfield can only be written when the USART is disabled (UE = 0).
Bit 10 PCE : Parity control enableThis bit selects the hardware parity control (generation and detection). When the parity control is enabled, the computed parity is inserted at the MSB position (9th bit if M = 1; 8th bit if M=0) and the parity is checked on the received data. This bit is set and cleared by software. Once it is set, PCE is active after the current byte (in reception and in transmission).
0: Parity control disabled
1: Parity control enabled
This bitfield can only be written when the USART is disabled (UE = 0).
Bit 9 PS : Parity selectionThis bit selects the odd or even parity when the parity generation/detection is enabled (PCE bit set). It is set and cleared by software. The parity is selected after the current byte.
0: Even parity
1: Odd parity
This bitfield can only be written when the USART is disabled (UE = 0).
Bit 8 PEIE : PE interrupt enableThis bit is set and cleared by software.
0: Interrupt inhibited
1: USART interrupt generated whenever PE = 1 in the USART_ISR register
Bit 7 TXFNIE : TXFIFO not full interrupt enableThis bit is set and cleared by software.
0: Interrupt inhibited
1: USART interrupt generated whenever TXFNF = 1 in the USART_ISR register
Bit 6 TCIE : Transmission complete interrupt enableThis bit is set and cleared by software.
0: Interrupt inhibited
1: USART interrupt generated whenever TC = 1 in the USART_ISR register
Bit 5 RXFNEIE : RXFIFO not empty interrupt enableThis bit is set and cleared by software.
0: Interrupt inhibited
1: USART interrupt generated whenever ORE = 1 or RXFNE = 1 in the USART_ISR register
Bit 4 IDLEIE : IDLE interrupt enableThis bit is set and cleared by software.
0: Interrupt inhibited
1: USART interrupt generated whenever IDLE = 1 in the USART_ISR register
Bit 3 TE: Transmitter enableThis bit enables the transmitter. When the autonomous mode is not used, TE bit is set and cleared by software. When the autonomous mode is used, TE bit becomes a status bit, which is set and cleared by hardware.
0: Transmitter is disabled
1: Transmitter is enabled
Note: When the USART acts as a transmitter, a low pulse on the TE bit (0 followed by 1) sends a preamble (idle line) after the current word, except in smartcard mode. In order to generate an idle character, the TE must not be immediately written to 1. To ensure the required duration, the software can poll the TEACK bit in the USART_ISR register. In smartcard mode, when TE is set, there is a 1 bit-time delay before the transmission starts.
Bit 2 RE: Receiver enableThis bit enables the receiver. It is set and cleared by software.
0: Receiver is disabled
1: Receiver is enabled and begins searching for a start bit
Bit 1 UESM: USART enable in low-power modeWhen this bit is cleared, the USART cannot request its kernel clock and is not functional in low-power mode.
When this bit is set, the USART can wake up the MCU from low-power mode.
This bit is set and cleared by software.
0: USART not functional in low-power mode.
1: USART functional in low-power mode.
Note: The UESM bit must be set at the initialization phase.
If the USART does not support the wake-up from low-power mode, this bit is reserved and must be kept at reset value. Refer to Section 39.4: USART implementation .
Bit 0 UE: USART enableWhen this bit is cleared, the USART prescalers and outputs are stopped immediately, and all current operations are discarded. The USART configuration is kept, but all the USART_ISR status flags are reset. This bit is set and cleared by software.
0: USART prescaler and outputs disabled, low-power mode
1: USART enabled
Note: To enter low-power mode without generating errors on the line, the TE bit must be previously reset and the software must wait for the TC bit in the USART_ISR to be set before resetting the UE bit.
The DMA requests are also reset when UE = 0 so the DMA channel must be disabled before resetting the UE bit.
In smartcard mode, (SCEN = 1), the CK is always available when CLKEN = 1, regardless of the UE bit value.
39.8.2 USART control register 1 [alternate] (USART_CR1)
Address offset: 0x00
Reset value: 0x0000 0000
The same register can be used in FIFO mode enabled (previous section) and FIFO mode disabled (this section).
FIFO mode disabled, FIFOEN = 0
| 31 | 30 | 29 | 28 | 27 | 26 | 25 | 24 | 23 | 22 | 21 | 20 | 19 | 18 | 17 | 16 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Res. | Res. | FIFO EN | M1 | EOBIE | RTOIE | DEAT[4:0] | DEDT[4:0] | ||||||||
| rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | ||
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| OVER8 | CMIE | MME | M0 | WAKE | PCE | PS | PEIE | TXEIE | TCIE | RXNEIE | IDLEIE | TE | RE | UESM | UE |
| rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw |
Bits 31:30 Reserved, must be kept at reset value.
Bit 29 FIFOEN: FIFO mode enable
This bit is set and cleared by software.
0: FIFO mode is disabled.
1: FIFO mode is enabled.
This bitfield can only be written when the USART is disabled (UE = 0).
Note: FIFO mode can be used on standard UART communication, in SPI master/slave mode and in smartcard modes only. It must not be enabled in IrDA and LIN modes.
Bit 28 M1: Word length
This bit must be used in conjunction with bit 12 (M0) to determine the word length. It is set or cleared by software.
M[1:0] = 00: 1 start bit, 8 Data bits, n stop bits
M[1:0] = 01: 1 start bit, 9 Data bits, n stop bits
M[1:0] = 10: 1 start bit, 7 Data bits, n stop bits
This bit can only be written when the USART is disabled (UE = 0).
Note: In 7-bits data length mode, the smartcard mode, LIN master mode and auto baud rate (0x7F and 0x55 frames detection) are not supported.
Bit 27 EOBIE: End of block interrupt enable
This bit is set and cleared by software.
0: Interrupt inhibited
1: USART interrupt generated when the EOBF flag is set in the USART_ISR register
Note: If the USART does not support smartcard mode, this bit is reserved and must be kept at reset value. Refer to Section 39.4: USART implementation.
Bit 26 RTOIE: Receiver timeout interrupt enable
This bit is set and cleared by software.
0: Interrupt inhibited
1: USART interrupt generated when the RTOF bit is set in the USART_ISR register.
Note: If the USART does not support the Receiver timeout feature, this bit is reserved and must be kept at reset value. Section 39.4: USART implementation.
Bits 25:21 DEAT[4:0] : Driver Enable assertion timeThis 5-bit value defines the time between the activation of the DE (Driver Enable) signal and the beginning of the start bit. It is expressed in sample time units (1/8 or 1/16 bit time, depending on the oversampling rate).
This bitfield can only be written when the USART is disabled (UE = 0).
Note: If the Driver Enable feature is not supported, this bit is reserved and must be kept at reset value. Refer to Section 39.4: USART implementation.
Bits 20:16 DEDT[4:0] : Driver Enable deassertion timeThis 5-bit value defines the time between the end of the last stop bit, in a transmitted message, and the de-activation of the DE (Driver Enable) signal. It is expressed in sample time units (1/8 or 1/16 bit time, depending on the oversampling rate).
If the USART_TDR register is written during the DEDT time, the new data is transmitted only when the DEDT and DEAT times have both elapsed.
This bitfield can only be written when the USART is disabled (UE = 0).
Note: If the Driver Enable feature is not supported, this bit is reserved and must be kept at reset value. Refer to Section 39.4: USART implementation.
Bit 15 OVER8 : Oversampling mode0: Oversampling by 16
1: Oversampling by 8
This bit can only be written when the USART is disabled (UE = 0).
Note: In LIN, IrDA and smartcard modes, this bit must be kept cleared.
Bit 14 CMIE : Character match interrupt enableThis bit is set and cleared by software.
0: Interrupt inhibited
1: USART interrupt generated when the CMF bit is set in the USART_ISR register.
Bit 13 MME : Mute mode enableThis bit enables the USART mute mode function. When set, the USART can switch between active and mute mode, as defined by the WAKE bit. It is set and cleared by software.
0: Receiver in active mode permanently
1: Receiver can switch between mute mode and active mode.
Bit 12 M0 : Word lengthThis bit is used in conjunction with bit 28 (M1) to determine the word length. It is set or cleared by software (refer to bit 28 (M1) description).
This bit can only be written when the USART is disabled (UE = 0).
Bit 11 WAKE : Receiver wake-up methodThis bit determines the USART wake-up method from mute mode. It is set or cleared by software.
0: Idle line
1: Address mark
This bitfield can only be written when the USART is disabled (UE = 0).
Bit 10 PCE : Parity control enableThis bit selects the hardware parity control (generation and detection). When the parity control is enabled, the computed parity is inserted at the MSB position (9th bit if M = 1; 8th bit if M = 0) and the parity is checked on the received data. This bit is set and cleared by software. Once it is set, PCE is active after the current byte (in reception and in transmission).
0: Parity control disabled
1: Parity control enabled
This bitfield can only be written when the USART is disabled (UE = 0).
Bit 9 PS: Parity selectionThis bit selects the odd or even parity when the parity generation/detection is enabled (PCE bit set). It is set and cleared by software. The parity is selected after the current byte.
0: Even parity
1: Odd parity
This bitfield can only be written when the USART is disabled (UE = 0).
Bit 8 PEIE: PE interrupt enableThis bit is set and cleared by software.
0: Interrupt inhibited
1: USART interrupt generated whenever PE = 1 in the USART_ISR register
Bit 7 TXEIE: Transmit data register emptyThis bit is set and cleared by software.
0: Interrupt inhibited
1: USART interrupt generated whenever TXE = 1 in the USART_ISR register
Bit 6 TCIE: Transmission complete interrupt enableThis bit is set and cleared by software.
0: Interrupt inhibited
1: USART interrupt generated whenever TC = 1 in the USART_ISR register
Bit 5 RXNEIE: Receive data register not emptyThis bit is set and cleared by software.
0: Interrupt inhibited
1: USART interrupt generated whenever ORE = 1 or RXNE = 1 in the USART_ISR register
Bit 4 IDLEIE: IDLE interrupt enableThis bit is set and cleared by software.
0: Interrupt inhibited
1: USART interrupt generated whenever IDLE = 1 in the USART_ISR register
Bit 3 TE: Transmitter enableThis bit enables the transmitter. When the autonomous mode is not used, TE bit is set and cleared by software. When the autonomous mode is used, TE bit becomes a status bit, which is set and cleared by hardware.
0: Transmitter is disabled
1: Transmitter is enabled
Note: When the USART acts as a transmitter, a low pulse on the TE bit (0 followed by 1) sends a preamble (idle line) after the current word, except in smartcard mode. In order to generate an idle character, the TE must not be immediately written to 1. To ensure the required duration, the software can poll the TEACK bit in the USART_ISR register.
In smartcard mode, when TE is set, there is a 1 bit-time delay before the transmission starts.
Bit 2 RE: Receiver enableThis bit enables the receiver. It is set and cleared by software.
0: Receiver is disabled
1: Receiver is enabled and begins searching for a start bit
Bit 1 UESM : USART enable in low-power modeWhen this bit is cleared, the USART cannot request its kernel clock and is not functional in low-power mode.
When this bit is set, the USART can wake up the MCU from low-power mode.
This bit is set and cleared by software.
0: USART not functional in low-power mode.
1: USART functional in low-power mode.
Note: The UESM bit must be set at the initialization phase.
If the USART does not support the wake-up from low-power mode, this bit is reserved and must be kept at reset value. Refer to Section 39.4: USART implementation .
Bit 0 UE : USART enableWhen this bit is cleared, the USART prescalers and outputs are stopped immediately, and all current operations are discarded. The USART configuration is kept, but all the USART_ISR status flags are reset. This bit is set and cleared by software.
0: USART prescaler and outputs disabled, low-power mode
1: USART enabled
Note: To enter low-power mode without generating errors on the line, the TE bit must be previously reset and the software must wait for the TC bit in the USART_ISR to be set before resetting the UE bit.
The DMA requests are also reset when UE = 0 so the DMA channel must be disabled before resetting the UE bit.
In smartcard mode, (SCEN = 1), the CK is always available when CLKEN = 1, regardless of the UE bit value.
39.8.3 USART control register 2 (USART_CR2)
Address offset: 0x04
Reset value: 0x0000 0000
| 31 | 30 | 29 | 28 | 27 | 26 | 25 | 24 | 23 | 22 | 21 | 20 | 19 | 18 | 17 | 16 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ADD[7:0] | RTOEN | ABRMOD[1:0] | ABREN | MSBFI RST | DATAINV | TXINV | RXINV | ||||||||
| rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw |
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| SWAP | LINEN | STOP[1:0] | CLKEN | CPOL | CPHA | LBCL | Res. | LBDIE | LBDL | ADD7M | DIS_NSS | Res. | Res. | SLVEN | |
| rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | |||
These bits give the address of the USART node in mute mode or a character code to be recognized in low-power or Run mode:
- – In mute mode: they are used in multiprocessor communication to wake up from mute mode with 4-bit/7-bit address mark detection. The MSB of the character sent by the transmitter must be equal to 1. In 4-bit address mark detection, only ADD[3:0] bits are used.
- – In low-power mode: they are used for wake up from low-power mode on character match. When a character, received during low-power mode, corresponds to the character programmed through ADD[7:0] bitfield, the CMF flag is set and wakes up the device from low-power mode if the corresponding interrupt is enabled by setting CMIE bit.
- – In Run mode with mute mode inactive (for example, end-of-block detection in ModBus protocol): the whole received character (8 bits) is compared to ADD[7:0] value and CMF flag is set on match. An interrupt is generated if the CMIE bit is set.
These bits can only be written when the USART is disabled (UE = 0).
Bit 23 RTOEN : Receiver timeout enableThis bit is set and cleared by software.
0: Receiver timeout feature disabled.
1: Receiver timeout feature enabled.
When this feature is enabled, the RTOF flag in the USART_ISR register is set if the RX line is idle (no reception) for the duration programmed in the RTOR (receiver timeout register).
Note: If the USART does not support the Receiver timeout feature, this bit is reserved and must be kept at reset value. Refer to Section 39.4: USART implementation .
Bits 22:21 ABRMOD[1:0] : Auto baud rate modeThese bits are set and cleared by software.
00: Measurement of the start bit is used to detect the baud rate.
01: Falling edge to falling edge measurement (the received frame must start with a single bit = 1 -> Frame = Start10xxxxx)
10: 0x7F frame detection.
11: 0x55 frame detection
This bitfield can only be written when ABREN = 0 or the USART is disabled (UE = 0).
Note: If DATAINV = 1 and/or MSBFIRST = 1 the patterns must be the same on the line, for example 0xAA for MSBFIRST)
If the USART does not support the auto baud rate feature, this bit is reserved and must be kept at reset value. Refer to Section 39.4: USART implementation .
Bit 20 ABREN : Auto baud rate enableThis bit is set and cleared by software.
0: Auto baud rate detection is disabled.
1: Auto baud rate detection is enabled.
Note: If the USART does not support the auto baud rate feature, this bit is reserved and must be kept at reset value. Refer to Section 39.4: USART implementation .
Bit 19 MSBFIRST : Most significant bit firstThis bit is set and cleared by software.
0: data is transmitted/received with data bit 0 first, following the start bit.
1: data is transmitted/received with the MSB (bit 7/8) first, following the start bit.
This bitfield can only be written when the USART is disabled (UE = 0).
Bit 18 DATAINV : Binary data inversionThis bit is set and cleared by software.
0: Logical data from the data register are send/received in positive/direct logic. (1 = H, 0 = L)
1: Logical data from the data register are send/received in negative/inverse logic. (1 = L, 0 = H).
The parity bit is also inverted.
This bitfield can only be written when the USART is disabled (UE = 0).
Bit 17 TXINV : TX pin active level inversionThis bit is set and cleared by software.
0: TX pin signal works using the standard logic levels ( \( V_{DD} \) = 1 / idle, Gnd = 0 / mark)
1: TX pin signal values are inverted. ( \( V_{DD} \) = 0 / mark, Gnd = 1 / idle).
This enables the use of an external inverter on the TX line.
This bitfield can only be written when the USART is disabled (UE = 0).
Bit 16 RXINV : RX pin active level inversionThis bit is set and cleared by software.
0: RX pin signal works using the standard logic levels ( \( V_{DD} \) = 1 / idle, Gnd = 0 / mark)
1: RX pin signal values are inverted. ( \( V_{DD} \) = 0 / mark, Gnd = 1 / idle).
This enables the use of an external inverter on the RX line.
This bitfield can only be written when the USART is disabled (UE = 0).
Bit 15 SWAP : Swap TX/RX pinsThis bit is set and cleared by software.
0: TX/RX pins are used as defined in standard pinout
1: The TX and RX pins functions are swapped. This enables to work in the case of a cross-wired connection to another UART.
This bitfield can only be written when the USART is disabled (UE = 0).
Bit 14 LINEN : LIN mode enableThis bit is set and cleared by software.
0: LIN mode disabled
1: LIN mode enabled
The LIN mode enables the capability to send LIN synchronous breaks (13 low bits) using the SBKRQ bit in the USART_CR1 register, and to detect LIN Sync breaks.
This bitfield can only be written when the USART is disabled (UE = 0).
Note: If the USART does not support LIN mode, this bit is reserved and must be kept at reset value.
Refer to Section 39.4: USART implementation .
Bits 13:12 STOP[1:0] : Stop bitsThese bits are used for programming the stop bits.
00: 1 stop bit
01: 0.5 stop bit.
10: 2 stop bits
11: 1.5 stop bits
This bitfield can only be written when the USART is disabled (UE = 0).
Bit 11 CLKEN: Clock enableThis bit enables the user to enable the CK pin.
0: CK pin disabled
1: CK pin enabled
Note: If neither synchronous mode nor smartcard mode is supported, this bit is reserved and must be kept at reset value. Refer to Section 39.4: USART implementation .
In smartcard mode, in order to provide correctly the CK clock to the smartcard, the steps below must be respected:
UE = 0
SCEN = 1
GTPR configuration
CLKEN= 1
UE = 1
Bit 10 CPOL: Clock polarityThis bit enables the user to select the polarity of the clock output on the CK pin in synchronous mode. It works in conjunction with the CPHA bit to produce the desired clock/data relationship
0: Steady low value on CK pin outside transmission window
1: Steady high value on CK pin outside transmission window
This bit can only be written when the USART is disabled (UE = 0).
Note: If synchronous mode is not supported, this bit is reserved and must be kept at reset value. Refer to Section 39.4: USART implementation .
Bit 9 CPHA: Clock phaseThis bit is used to select the phase of the clock output on the CK pin in synchronous mode. It works in conjunction with the CPOL bit to produce the desired clock/data relationship (see Figure 424 and Figure 425 )
0: The first clock transition is the first data capture edge
1: The second clock transition is the first data capture edge
This bit can only be written when the USART is disabled (UE = 0).
Note: If synchronous mode is not supported, this bit is reserved and must be kept at reset value. Refer to Section 39.4: USART implementation .
Bit 8 LBCL: Last bit clock pulseThis bit is used to select whether the clock pulse associated with the last data bit transmitted (MSB) has to be output on the CK pin in synchronous mode.
0: The clock pulse of the last data bit is not output to the CK pin
1: The clock pulse of the last data bit is output to the CK pin
Caution: The last bit is the 7th or 8th or 9th data bit transmitted depending on the 7 or 8 or 9 bit format selected by the M bit in the USART_CR1 register.
This bit can only be written when the USART is disabled (UE = 0).
Note: If synchronous mode is not supported, this bit is reserved and must be kept at reset value. Refer to Section 39.4: USART implementation .
Bit 7 Reserved, must be kept at reset value.
Bit 6 LBDIE: LIN break detection interrupt enableBreak interrupt mask (break detection using break delimiter).
0: Interrupt is inhibited
1: An interrupt is generated whenever LBDF = 1 in the USART_ISR register
Note: If LIN mode is not supported, this bit is reserved and must be kept at reset value. Refer to Section 39.4: USART implementation .
Bit 5 LBDL : LIN break detection lengthThis bit is for selection between 11 bit or 10 bit break detection.
0: 10-bit break detection
1: 11-bit break detection
This bit can only be written when the USART is disabled (UE = 0).
Note: If LIN mode is not supported, this bit is reserved and must be kept at reset value. Refer to Section 39.4: USART implementation.
Bit 4 ADD7 : 7-bit address detection/4-bit address detectionThis bit is for selection between 4-bit address detection or 7-bit address detection.
0: 4-bit address detection
1: 7-bit address detection (in 8-bit data mode)
This bit can only be written when the USART is disabled (UE = 0)
Note: In 7-bit and 9-bit data modes, the address detection is done on 6-bit and 8-bit address (ADD[5:0] and ADD[7:0]) respectively.
Bit 3 DIS_NSS :When the DIS_NSS bit is set, the NSS pin input is ignored.
0: SPI slave selection depends on NSS input pin.
1: SPI slave is always selected and NSS input pin is ignored.
This bitfield can only be written when the USART is disabled (UE = 0).
Note: When SPI slave mode is not supported, this bit is reserved and must be kept at reset value. Refer to Section 39.4: USART implementation.
Bits 2:1 Reserved, must be kept at reset value.
Bit 0 SLVEN : Synchronous slave mode enableWhen the SLVEN bit is set, the synchronous slave mode is enabled.
0: Slave mode disabled.
1: Slave mode enabled.
This bitfield can only be written when the USART is disabled (UE = 0).
Note: When SPI slave mode is not supported, this bit is reserved and must be kept at reset value. Refer to Section 39.4: USART implementation.
Note: The CPOL, CPHA, and LBCL bits must not be written while the transmitter is enabled.
39.8.4 USART control register 3 (USART_CR3)
Address offset: 0x08
Reset value: 0x0000 0000
FIFO mode enabled, FIFOEN = 1
| 31 | 30 | 29 | 28 | 27 | 26 | 25 | 24 | 23 | 22 | 21 | 20 | 19 | 18 | 17 | 16 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| TXFTCFG[2:0] | RXF TIE | RXFTCFG[2:0] | TCBG TIE | TXFTIE | Res. | Res. | Res. | SCARCNT[2:0] | Res. | ||||||
| rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | ||||
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| DEP | DEM | DDRE | OVR DIS | ONE BIT | CTSIE | CTSE | RTSE | DMAT | DMAR | SCEN | NACK | HD SEL | IRLP | IREN | EIE |
| rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw |
Bits 31:29 TXFTCFG[2:0] : TXFIFO threshold configuration
000:TXFIFO reaches 1/8 of its depth
001:TXFIFO reaches 1/4 of its depth
010:TXFIFO reaches 1/2 of its depth
011:TXFIFO reaches 3/4 of its depth
100:TXFIFO reaches 7/8 of its depth
101:TXFIFO becomes empty
Others: Reserved, must not be used
This bitfield can only be written when the USART is disabled (UE = 0).
Bit 28 RXFTIE : RXFIFO threshold interrupt enable
This bit is set and cleared by software.
0: Interrupt inhibited
1: USART interrupt generated when Receive FIFO reaches the threshold programmed in RXFTCFG[2:0].
Bits 27:25 RXFTCFG[2:0] : Receive FIFO threshold configuration
000:Receive FIFO reaches 1/8 of its depth
001:Receive FIFO reaches 1/4 of its depth
010:Receive FIFO reaches 1/2 of its depth
011:Receive FIFO reaches 3/4 of its depth
100:Receive FIFO reaches 7/8 of its depth
101:Receive FIFO becomes full
Others: Reserved, must not be used
This bitfield can only be written when the USART is disabled (UE = 0).
Bit 24 TCBGIE : Transmission Complete before guard time, interrupt enable
This bit is set and cleared by software.
0: Interrupt inhibited
1: USART interrupt generated whenever TCBGT = 1 in the USART_ISR register
Note: If the USART does not support the smartcard mode, this bit is reserved and must be kept at reset value. Refer to Section 39.4: USART implementation.
Bit 23 TXFTIE : TXFIFO threshold interrupt enable
This bit is set and cleared by software.
0: Interrupt inhibited
1: USART interrupt generated when TXFIFO reaches the threshold programmed in TXFTCFG[2:0].
Bits 22:20 Reserved, must be kept at reset value.
Bits 19:17 SCARCNT[2:0] : Smartcard auto-retry count
This bitfield specifies the number of retries for transmission and reception in smartcard mode.
In transmission mode, it specifies the number of automatic retransmission retries, before generating a transmission error (FE bit set).
In reception mode, it specifies the number of erroneous reception trials, before generating a reception error (RXNE/RXFNE and PE bits set).
This bitfield must be programmed only when the USART is disabled (UE = 0).
When the USART is enabled (UE = 1), this bitfield may only be written to 0x0, in order to stop retransmission.
0x0: retransmission disabled - No automatic retransmission in transmission mode.
0x1 to 0x7: number of automatic retransmission attempts (before signaling error)
Note: If smartcard mode is not supported, this bit is reserved and must be kept at reset value. Refer to Section 39.4: USART implementation.
Bit 16 Reserved, must be kept at reset value.
Bit 15 DEP : Driver enable polarity selection
0: DE signal is active high.
1: DE signal is active low.
This bit can only be written when the USART is disabled (UE = 0).
Note: If the Driver Enable feature is not supported, this bit is reserved and must be kept at reset value. Refer to Section 39.4: USART implementation on page 1452 .
Bit 14 DEM : Driver enable mode
This bit enables the user to activate the external transceiver control, through the DE signal.
0: DE function is disabled.
1: DE function is enabled. The DE signal is output on the RTS pin.
This bit can only be written when the USART is disabled (UE = 0).
Note: If the Driver Enable feature is not supported, this bit is reserved and must be kept at reset value. Section 39.4: USART implementation on page 1452 .
Bit 13 DDRE : DMA Disable on reception Error
0: DMA is not disabled in case of reception error. The corresponding error flag is set but RXNE is kept 0 preventing from overrun. As a consequence, the DMA request is not asserted, so the erroneous data is not transferred (no DMA request), but next correct received data is transferred. (used for smartcard mode)
1: DMA is disabled following a reception error. The corresponding error flag is set, as well as RXNE. The DMA request is masked until the error flag is cleared. This means that the software must first disable the DMA request (DMAR = 0) or clear RXNE(RXFNE is case FIFO mode is enabled) before clearing the error flag.
This bit can only be written when the USART is disabled (UE = 0).
Note: The reception errors are: parity error, framing error or noise error.
Bit 12 OVRDIS : Overrun Disable
This bit is used to disable the receive overrun detection.
0: Overrun Error Flag, ORE, is set when received data is not read before receiving new data.
1: Overrun functionality is disabled. If new data is received while the RXNE flag is still set the ORE flag is not set and the new received data overwrites the previous content of the USART_RDR register. When FIFO mode is enabled, the RXFIFO is bypassed and data are written directly in USART_RDR register. Even when FIFO management is enabled, the RXNE flag is to be used.
This bit can only be written when the USART is disabled (UE = 0).
Note: This control bit enables checking the communication flow w/o reading the data
Bit 11 ONEBIT : One sample bit method enable
This bit enables the user to select the sample method. When the one sample bit method is selected the noise detection flag (NE) is disabled.
0: Three sample bit method
1: One sample bit method
This bit can only be written when the USART is disabled (UE = 0).
Bit 10 CTSIE : CTS interrupt enable
0: Interrupt is inhibited
1: An interrupt is generated whenever CTSIF = 1 in the USART_ISR register
Note: If the hardware flow control feature is not supported, this bit is reserved and must be kept at reset value. Refer to Section 39.4: USART implementation .
Bit 9 CTSE : CTS enable0: CTS hardware flow control disabled
1: CTS mode enabled, data is only transmitted when the CTS input is deasserted (tied to 0).
If the CTS input is asserted while data is being transmitted, then the transmission completes before stopping. If data is written into the data register while CTS is asserted, the transmission is postponed until CTS is deasserted.
This bit can only be written when the USART is disabled (UE = 0)
Note: If the hardware flow control feature is not supported, this bit is reserved and must be kept at reset value. Refer to Section 39.4: USART implementation .
Bit 8 RTSE : RTS enable0: RTS hardware flow control disabled
1: RTS output enabled, data is only requested when there is space in the receive buffer. The transmission of data is expected to cease after the current character has been transmitted. The RTS output is deasserted (pulled to 0) when data can be received.
This bit can only be written when the USART is disabled (UE = 0).
Note: If the hardware flow control feature is not supported, this bit is reserved and must be kept at reset value. Refer to Section 39.4: USART implementation .
Bit 7 DMAT : DMA enable transmitterThis bit is set/reset by software
1: DMA mode is enabled for transmission
0: DMA mode is disabled for transmission
Bit 6 DMAR : DMA enable receiverThis bit is set/reset by software
1: DMA mode is enabled for reception
0: DMA mode is disabled for reception
Bit 5 SCEN : Smartcard mode enableThis bit is used for enabling smartcard mode.
0: Smartcard mode disabled
1: Smartcard mode enabled
This bitfield can only be written when the USART is disabled (UE = 0).
Note: If the USART does not support smartcard mode, this bit is reserved and must be kept at reset value. Refer to Section 39.4: USART implementation .
Bit 4 NACK : Smartcard NACK enable0: NACK transmission in case of parity error is disabled
1: NACK transmission during parity error is enabled
This bitfield can only be written when the USART is disabled (UE = 0).
Note: If the USART does not support smartcard mode, this bit is reserved and must be kept at reset value. Refer to Section 39.4: USART implementation .
Bit 3 HDSEL : Half-duplex selectionSelection of single-wire half-duplex mode
0: Half-duplex mode is not selected
1: Half-duplex mode is selected
This bit can only be written when the USART is disabled (UE = 0).
Bit 2 IRLP : IrDA low-powerThis bit is used for selecting between normal and low-power IrDA modes
0: Normal mode
1: Low-power mode
This bit can only be written when the USART is disabled (UE = 0).
Note: If IrDA mode is not supported, this bit is reserved and must be kept at reset value.
Refer to Section 39.4: USART implementation .
Bit 1 IREN : IrDA mode enableThis bit is set and cleared by software.
0: IrDA disabled
1: IrDA enabled
This bit can only be written when the USART is disabled (UE = 0).
Note: If IrDA mode is not supported, this bit is reserved and must be kept at reset value.
Refer to Section 39.4: USART implementation .
Bit 0 EIE : Error interrupt enableError Interrupt Enable Bit is required to enable interrupt generation in case of a framing error, overrun error noise flag or SPI slave underrun error (FE = 1 or ORE = 1 or NE = 1 or UDR = 1 in the USART_ISR register).
0: Interrupt inhibited
1: interrupt generated when FE = 1 or ORE = 1 or NE = 1 or UDR = 1 (in SPI slave mode) in the USART_ISR register.
39.8.5 USART control register 3 [alternate] (USART_CR3)
Address offset: 0x08
Reset value: 0x0000 0000
FIFO mode disabled, FIFOEN = 0
| 31 | 30 | 29 | 28 | 27 | 26 | 25 | 24 | 23 | 22 | 21 | 20 | 19 | 18 | 17 | 16 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Res. | Res. | Res. | Res. | Res. | Res. | Res. | TCBG TIE | Res. | Res. | Res. | Res. | SCARCNT[2:0] | Res. | ||
| rw | rw | rw | rw | ||||||||||||
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| DEP | DEM | DDRE | OVR DIS | ONE BIT | CTSIE | CTSE | RTSE | DMAT | DMAR | SCEN | NACK | HD SEL | IRLP | IREN | EIE |
| rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw |
Bits 31:25 Reserved, must be kept at reset value.
Bit 24 TCBGTIE : Transmission Complete before guard time, interrupt enableThis bit is set and cleared by software.
0: Interrupt inhibited
1: USART interrupt generated whenever TCBGT = 1 in the USART_ISR register
Note: If the USART does not support the smartcard mode, this bit is reserved and must be kept at reset value. Refer to Section 39.4: USART implementation .
Bit 23 Reserved, must be kept at reset value.
Bits 22:20 Reserved, must be kept at reset value.
Bits 19:17 SCARCNT[2:0] : Smartcard auto-retry count
This bitfield specifies the number of retries for transmission and reception in smartcard mode.
In transmission mode, it specifies the number of automatic retransmission retries, before generating a transmission error (FE bit set).
In reception mode, it specifies the number of erroneous reception trials, before generating a reception error (RXNE/RXFNE and PE bits set).
This bitfield must be programmed only when the USART is disabled (UE = 0).
When the USART is enabled (UE = 1), this bitfield may only be written to 0x0, in order to stop retransmission.
0x0: retransmission disabled - No automatic retransmission in transmission mode.
0x1 to 0x7: number of automatic retransmission attempts (before signaling error)
Note: If smartcard mode is not supported, this bit is reserved and must be kept at reset value. Refer to Section 39.4: USART implementation .
Bit 16 Reserved, must be kept at reset value.
Bit 15 DEP : Driver enable polarity selection
0: DE signal is active high.
1: DE signal is active low.
This bit can only be written when the USART is disabled (UE = 0).
Note: If the Driver Enable feature is not supported, this bit is reserved and must be kept at reset value. Refer to Section 39.4: USART implementation .
Bit 14 DEM : Driver enable mode
This bit enables the user to activate the external transceiver control, through the DE signal.
0: DE function is disabled.
1: DE function is enabled. The DE signal is output on the RTS pin.
This bit can only be written when the USART is disabled (UE = 0).
Note: If the Driver Enable feature is not supported, this bit is reserved and must be kept at reset value. Section 39.4: USART implementation .
Bit 13 DDRE : DMA Disable on reception Error
0: DMA is not disabled in case of reception error. The corresponding error flag is set but RXNE is kept 0 preventing from overrun. As a consequence, the DMA request is not asserted, so the erroneous data is not transferred (no DMA request), but next correct received data is transferred. (used for smartcard mode)
1: DMA is disabled following a reception error. The corresponding error flag is set, as well as RXNE. The DMA request is masked until the error flag is cleared. This means that the software must first disable the DMA request (DMAR = 0) or clear RXNE(RXFNE is case FIFO mode is enabled) before clearing the error flag.
This bit can only be written when the USART is disabled (UE = 0).
Note: The reception errors are: parity error, framing error or noise error.
Bit 12 OVRDIS : Overrun Disable
This bit is used to disable the receive overrun detection.
0: Overrun Error Flag, ORE, is set when received data is not read before receiving new data.
1: Overrun functionality is disabled. If new data is received while the RXNE flag is still set the ORE flag is not set and the new received data overwrites the previous content of the USART_RDR register. When FIFO mode is enabled, the RXFIFO is bypassed and data are written directly in USART_RDR register. Even when FIFO management is enabled, the RXNE flag is to be used.
This bit can only be written when the USART is disabled (UE = 0).
Note: This control bit enables checking the communication flow w/o reading the data
Bit 11 ONEBIT: One sample bit method enableThis bit enables the user to select the sample method. When the one sample bit method is selected the noise detection flag (NE) is disabled.
0: Three sample bit method
1: One sample bit method
This bit can only be written when the USART is disabled (UE = 0).
Bit 10 CTSIE: CTS interrupt enable0: Interrupt is inhibited
1: An interrupt is generated whenever CTSIF = 1 in the USART_ISR register
Note: If the hardware flow control feature is not supported, this bit is reserved and must be kept at reset value. Refer to Section 39.4: USART implementation .
Bit 9 CTSE: CTS enable0: CTS hardware flow control disabled
1: CTS mode enabled, data is only transmitted when the CTS input is deasserted (tied to 0).
If the CTS input is asserted while data is being transmitted, then the transmission completes before stopping. If data is written into the data register while CTS is asserted, the transmission is postponed until CTS is deasserted.
This bit can only be written when the USART is disabled (UE = 0)
Note: If the hardware flow control feature is not supported, this bit is reserved and must be kept at reset value. Refer to Section 39.4: USART implementation .
Bit 8 RTSE: RTS enable0: RTS hardware flow control disabled
1: RTS output enabled, data is only requested when there is space in the receive buffer. The transmission of data is expected to cease after the current character has been transmitted. The RTS output is deasserted (pulled to 0) when data can be received.
This bit can only be written when the USART is disabled (UE = 0).
Note: If the hardware flow control feature is not supported, this bit is reserved and must be kept at reset value. Refer to Section 39.4: USART implementation .
Bit 7 DMAT: DMA enable transmitterThis bit is set/reset by software
1: DMA mode is enabled for transmission
0: DMA mode is disabled for transmission
Bit 6 DMAR: DMA enable receiverThis bit is set/reset by software
1: DMA mode is enabled for reception
0: DMA mode is disabled for reception
Bit 5 SCEN: Smartcard mode enableThis bit is used for enabling smartcard mode.
0: Smartcard mode disabled
1: Smartcard mode enabled
This bitfield can only be written when the USART is disabled (UE = 0).
Note: If the USART does not support smartcard mode, this bit is reserved and must be kept at reset value. Refer to Section 39.4: USART implementation .
Bit 4 NACK: Smartcard NACK enable0: NACK transmission in case of parity error is disabled
1: NACK transmission during parity error is enabled
This bitfield can only be written when the USART is disabled (UE = 0).
Note: If the USART does not support smartcard mode, this bit is reserved and must be kept at reset value. Refer to Section 39.4: USART implementation .
Bit 3 HDSEL : Half-duplex selectionSelection of single-wire half-duplex mode
0: Half-duplex mode is not selected
1: Half-duplex mode is selected
This bit can only be written when the USART is disabled (UE = 0).
Bit 2 IRLP : IrDA low-powerThis bit is used for selecting between normal and low-power IrDA modes
0: Normal mode
1: Low-power mode
This bit can only be written when the USART is disabled (UE = 0).
Note: If IrDA mode is not supported, this bit is reserved and must be kept at reset value.
Refer to Section 39.4: USART implementation.
This bit is set and cleared by software.
0: IrDA disabled
1: IrDA enabled
This bit can only be written when the USART is disabled (UE = 0).
Note: If IrDA mode is not supported, this bit is reserved and must be kept at reset value.
Refer to Section 39.4: USART implementation.
Error Interrupt Enable Bit is required to enable interrupt generation in case of a framing error, overrun error noise flag or SPI slave underrun error (FE = 1 or ORE = 1 or NE = 1 or UDR = 1 in the USART_ISR register).
0: Interrupt inhibited
1: interrupt generated when FE = 1 or ORE = 1 or NE = 1 or UDR = 1 (in SPI slave mode) in the USART_ISR register.
39.8.6 USART baud rate register (USART_BRR)
This register can only be written when the USART is disabled (UE = 0). It may be automatically updated by hardware in auto baud rate detection mode.
Address offset: 0x0C
Reset value: 0x0000 0000
| 31 | 30 | 29 | 28 | 27 | 26 | 25 | 24 | 23 | 22 | 21 | 20 | 19 | 18 | 17 | 16 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. |
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| BRR[15:0] | |||||||||||||||
| rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw |
Bits 31:16 Reserved, must be kept at reset value.
Bits 15:0 BRR[15:0] : USART baud rate
BRR[15:4]
BRR[15:4] correspond to USARTDIV[15:4]
BRR[3:0]
When OVER8 = 0, BRR[3:0] = USARTDIV[3:0].
When OVER8 = 1:
BRR[2:0] = USARTDIV[3:0] shifted 1 bit to the right.
BRR[3] must be kept cleared.
39.8.7 USART guard time and prescaler register (USART_GTPR)
Address offset: 0x10
Reset value: 0x0000 0000
| 31 | 30 | 29 | 28 | 27 | 26 | 25 | 24 | 23 | 22 | 21 | 20 | 19 | 18 | 17 | 16 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. |
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| GT[7:0] | PSC[7:0] | ||||||||||||||
| rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw |
Bits 31:16 Reserved, must be kept at reset value.
Bits 15:8 GT[7:0] : Guard time value
This bitfield is used to program the Guard time value in terms of number of baud clock periods.
This is used in smartcard mode. The transmission complete flag is set after this guard time value.
This bitfield can only be written when the USART is disabled (UE = 0).
Note: If smartcard mode is not supported, this bit is reserved and must be kept at reset value.
Refer to
Section 39.4: USART implementation
.
Bits 7:0 PSC[7:0] : Prescaler value
Condition: IrDA low-power and normal IrDA mode
PSC[7:0] = IrDA normal and Low-power baud rate
This bitfield is used for programming the prescaler for dividing the USART source clock to achieve the low-power frequency:
The source clock is divided by the value given in the register (8 significant bits):
00000000: Reserved - do not program this value
00000001: divides the source clock by 1
00000010: divides the source clock by 2
...
Condition: Smartcard mode
PSC[4:0]: Prescaler value
This bitfield is used for programming the prescaler for dividing the USART source clock to provide the smartcard clock.
The value given in the register (5 significant bits) is multiplied by 2 to give the division factor of the source clock frequency:
00000: Reserved - do not program this value
00001: divides the source clock by 2
00010: divides the source clock by 4
00011: divides the source clock by 6
...
This bitfield can only be written when the USART is disabled (UE = 0).
Note: Bits [7:5] must be kept cleared if smartcard mode is used.
This bitfield is reserved and forced by hardware to 0 when the smartcard and IrDA modes are not supported. Refer to Section 39.4: USART implementation .
39.8.8 USART receiver timeout register (USART_RTOR)
Address offset: 0x14
Reset value: 0x0000 0000
| 31 | 30 | 29 | 28 | 27 | 26 | 25 | 24 | 23 | 22 | 21 | 20 | 19 | 18 | 17 | 16 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| BLEN[7:0] | RTO[23:16] | ||||||||||||||
| rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw |
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| RTO[15:0] | |||||||||||||||
| rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw |
This bitfield gives the block length in smartcard T = 1 reception. Its value equals the number of information characters + the length of the Epilogue Field (1 – LEC / 2 – CRC) – 1.
Examples:
BLEN = 0 -> 0 information characters + LEC
BLEN = 1 -> 0 information characters + CRC
BLEN = 255 -> 254 information characters + CRC (total 256 characters)
In smartcard mode, the block length counter is reset when TXE = 0 (TXFE = 0 in case FIFO mode is enabled).
This bitfield can be used also in other modes. In this case, the block length counter is reset when RE = 0 (receiver disabled) and/or when the EOBCF bit is written to 1.
Note: This value can be programmed after the start of the block reception (using the data from the LEN character in the Prologue Field). It must be programmed only once per received block.
Bits 23:0 RTO[23:0] : Receiver timeout valueThis bitfield gives the Receiver timeout value in terms of number of bit duration.
In Standard mode, the RTOF flag is set if, after the last received character, no new start bit is detected for more than the RTO value.
In smartcard mode, this value is used to implement the CWT and BWT. See smartcard chapter for more details. In the standard, the CWT/BWT measurement is done starting from the start bit of the last received character.
Note: This value must only be programmed once per received character.
Note: RTOR can be written on-the-fly. If the new value is lower than or equal to the counter, the RTOF flag is set.
This register is reserved and forced by hardware to “0x00000000” when the receiver timeout feature is not supported. Refer to Section 39.4: USART implementation .
39.8.9 USART request register (USART_RQR)
Address offset: 0x18
Reset value: 0x0000 0000
| 31 | 30 | 29 | 28 | 27 | 26 | 25 | 24 | 23 | 22 | 21 | 20 | 19 | 18 | 17 | 16 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. |
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | TXFRQ | RXFRQ | MMRQ | SBKRQ | ABRRQ |
| w | w | w | w | w |
Bits 31:5 Reserved, must be kept at reset value.
Bit 4 TXFRQ : Transmit data flush request
When FIFO mode is disabled, writing 1 to this bit sets the TXE flag. This enables to discard the transmit data. This bit must be used only in smartcard mode, when data have not been sent due to errors (NACK) and the FE flag is active in the USART_ISR register. If the USART does not support smartcard mode, this bit is reserved and must be kept at reset value.
When FIFO is enabled, TXFRQ bit is set to flush the whole FIFO. This sets the TXFE flag (Transmit FIFO empty, bit 23 in the USART_ISR register). Flushing the Transmit FIFO is supported in both UART and smartcard modes.
Note: In FIFO mode, the TXFNF flag is reset during the flush request until TxFIFO is empty in order to ensure that no data are written in the data register.
Bit 3 RXFRQ : Receive data flush request
Writing 1 to this bit empties the entire receive FIFO, that is clears the bit RXFNE.
This enables to discard the received data without reading them, and avoid an overrun condition.
Bit 2 MMRQ : Mute mode request
Writing 1 to this bit puts the USART in mute mode and resets the RWU flag.
Bit 1 SBKRQ : Send break request
Writing 1 to this bit sets the SBKF flag and request to send a BREAK on the line, as soon as the transmit machine is available.
Note: When the application needs to send the break character following all previously inserted data, including the ones not yet transmitted, the software must wait for the TXE flag assertion before setting the SBKRQ bit.
Bit 0 ABRRQ : Auto baud rate request
Writing 1 to this bit resets the ABRF and ABRE flags in the USART_ISR and requests an automatic baud rate measurement on the next received data frame.
Note: If the USART does not support the auto baud rate feature, this bit is reserved and must be kept at reset value. Refer to Section 39.4: USART implementation.
39.8.10 USART interrupt and status register (USART_ISR)
Address offset: 0x1C
Reset value: 0x0XX0 00C0
XX = 28 if FIFO/smartcard mode supported
XX = 08 if FIFO supported and smartcard mode not supported
The same register can be used in FIFO mode enabled (this section) and FIFO mode disabled (next section).
FIFO mode enabled, FIFOEN = 1
| 31 | 30 | 29 | 28 | 27 | 26 | 25 | 24 | 23 | 22 | 21 | 20 | 19 | 18 | 17 | 16 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Res. | Res. | Res. | Res. | TXFT | RXFT | TCBGT | RXFF | TXFE | REACK | TEACK | Res. | RWU | SBKF | CMF | BUSY |
| r | r | r | r | r | r | r | r | r | r | r | |||||
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| ABRF | ABRE | UDR | EOBF | RTOF | CTS | CTSIF | LBDF | TXFNF | TC | RXFNE | IDLE | ORE | NE | FE | PE |
| r | r | r | r | r | r | r | r | r | r | r | r | r | r | r | r |
Bits 31:28 Reserved, must be kept at reset value.
Bit 27 TXFT : TXFIFO threshold flag
This bit is set by hardware when the number of empty locations in the TXFIFO is greater than the threshold programmed in the TXFTCFG[2:0] bitfield of USART_CR3 register.
An interrupt is generated if the TXFTIE bit (bit 31) is set in the USART_CR3 register.
0: TXFIFO does not reach the programmed threshold.
1: TXFIFO reached the programmed threshold.
Bit 26 RXFT : RXFIFO threshold flag
This bit is set by hardware when the threshold programmed in the RXFTCFG[2:0] bitfield of the USART_CR3 register is reached. This means that there are (RXFTCFG[2:0] – 1) data in the Receive FIFO and one data in the USART_RDR register. An interrupt is generated if the RXFTIE bit = 1 (bit 28) in the USART_CR3 register.
0: Receive FIFO does not reach the programmed threshold.
1: Receive FIFO reached the programmed threshold.
Note: When the RXFTCFG[2:0] threshold is configured to 101, the RXFT flag is set if RXFIFO size data are available, that is, (RXFIFO size – 1) data in the RXFIFO and 1 data in the USART_RDR. Consequently, the (RXFIFO size + 1) th received data does not cause an overrun error. The overrun error occurs after receiving the (RXFIFO size + 2) th data.
Bit 25 TCBGT : Transmission complete before guard time flag
This bit is set when the last data written in the USART_TDR has been transmitted correctly out of the shift register.
It is set by hardware in smartcard mode, if the transmission of a frame containing data has completed and if the smartcard did not send back any NACK. An interrupt is generated if TCBGTIE = 1 in the USART_CR3 register.
This bit is cleared by software, by writing 1 to the TCBGTCF in the USART_ICR register or by a write to the USART_TDR register.
0: Transmission has not completed, or transmission has completed unsuccessfully (that is, a NACK is received from the card)
1: Transmission has completed successfully (before Guard time completion and there is no NACK from the smart card).
Note: If the USART does not support the smartcard mode, this bit is reserved and kept at reset value. If the USART supports the smartcard mode and the smartcard mode is enabled, the TCBGT reset value is 1. Refer to Section 39.4: USART implementation .
Bit 24 RXFF : RXFIFO Full
This bit is set by hardware when the number of received data corresponds to RXFIFO size + 1 (RXFIFO full + 1 data in the USART_RDR register.
An interrupt is generated if the RXFFIE bit = 1 in the USART_CR1 register.
0: RXFIFO not full.
1: RXFIFO Full.
Bit 23 TXFE : TXFIFO Empty
This bit is set by hardware when TXFIFO is Empty. When the TXFIFO contains at least one data, this flag is cleared. The TXFE flag can also be set by writing 1 to the bit TXFRQ (bit 4) in the USART_RQR register.
An interrupt is generated if the TXFEIE bit = 1 (bit 30) in the USART_CR1 register.
0: TXFIFO not empty.
1: TXFIFO empty.
Bit 22 REACK : Receive enable acknowledge flagThis bit is set/reset by hardware, when the Receive Enable value is taken into account by the USART.
It can be used to verify that the USART is ready for reception before entering low-power mode.
Note: If the USART does not support the wake-up from Stop feature, this bit is reserved and kept at reset value. Refer to Section 39.4: USART implementation .
Bit 21 TEACK : Transmit enable acknowledge flagThis bit is set/reset by hardware, when the Transmit Enable value is taken into account by the USART.
It can be used when an idle frame request is generated by writing TE = 0, followed by TE = 1 in the USART_CR1 register, in order to respect the TE = 0 minimum period.
Bit 20 Reserved, must be kept at reset value.
Bit 19 RWU : Receiver wake-up from mute modeThis bit indicates if the USART is in mute mode. It is cleared/set by hardware when a wake-up/mute sequence is recognized. The mute mode control sequence (address or IDLE) is selected by the WAKE bit in the USART_CR1 register.
When wake-up on idle mode is selected, this bit can only be set by software, writing 1 to the MMRQ bit in the USART_RQR register.
0: Receiver in active mode
1: Receiver in mute mode
Note: If the USART does not support the wake-up from Stop feature, this bit is reserved and kept at reset value. Refer to Section 39.4: USART implementation .
Bit 18 SBKF : Send break flagThis bit indicates that a send break character was requested. It is set by software, by writing 1 to the SBKRQ bit in the USART_CR3 register. It is automatically reset by hardware during the stop bit of break transmission.
0: No break character transmitted
1: Break character transmitted
Bit 17 CMF : Character match flagThis bit is set by hardware, when a the character defined by ADD[7:0] is received. It is cleared by software, writing 1 to the CMCF in the USART_ICR register.
An interrupt is generated if CMIE = 1 in the USART_CR1 register.
0: No Character match detected
1: Character match detected
Bit 16 BUSY : Busy flagThis bit is set and reset by hardware. It is active when a communication is ongoing on the RX line (successful start bit detected). It is reset at the end of the reception (successful or not).
0: USART is idle (no reception)
1: Reception ongoing
Bit 15 ABRF : Auto baud rate flagThis bit is set by hardware when the automatic baud rate has been set (RXFNE is also set, generating an interrupt if RXFNEIE = 1) or when the auto baud rate operation has completed without success (ABRE = 1) (ABRE, RXFNE and FE are also set in this case). It is cleared by software, in order to request a new auto baud rate detection, by writing 1 to the ABRHQ in the USART_RQR register.
Note: If the USART does not support the auto baud rate feature, this bit is reserved and kept at reset value.
Bit 14 ABRE: Auto baud rate errorThis bit is set by hardware if the baud rate measurement failed (baud rate out of range or character comparison failed)
It is cleared by software, by writing 1 to the ABRREQ bit in the USART_RQR register.
Note: If the USART does not support the auto baud rate feature, this bit is reserved and kept at reset value.
Bit 13 UDR: SPI slave underrun error flagIn slave transmission mode, this flag is set when the first clock pulse for data transmission appears while the software has not yet loaded any value into USART_TDR. This flag is reset by setting UDRCF bit in the USART_ICR register.
0: No underrun error
1: underrun error
Note: If the USART does not support the SPI slave mode, this bit is reserved and kept at reset value. Refer to Section 39.4: USART implementation .
Bit 12 EOBF: End of block flagThis bit is set by hardware when a complete block has been received (for example T = 1 smartcard mode). The detection is done when the number of received bytes (from the start of the block, including the prologue) is equal or greater than BLEN + 4.
An interrupt is generated if EOBIE = 1 in the USART_CR1 register.
It is cleared by software, writing 1 to EOBBCF in the USART_ICR register.
0: End of block not reached
1: End of block (number of characters) reached
Note: If smartcard mode is not supported, this bit is reserved and kept at reset value. Refer to Section 39.4: USART implementation .
Bit 11 RTOF: Receiver timeoutThis bit is set by hardware when the timeout value, programmed in the RTOR register has lapsed, without any communication. It is cleared by software, writing 1 to the RTOCF bit in the USART_ICR register.
An interrupt is generated if RTOIE = 1 in the USART_CR2 register.
In smartcard mode, the timeout corresponds to the CWT or BWT timings.
0: Timeout value not reached
1: Timeout value reached without any data reception
Note: If a time equal to the value programmed in RTOR register separates 2 characters, RTOF is not set. If this time exceeds this value + 2 sample times (2/16 or 2/8, depending on the oversampling method), RTOF flag is set.
The counter counts even if RE = 0 but RTOF is set only when RE = 1. If the timeout has already elapsed when RE is set, then RTOF is set.
If the USART does not support the Receiver timeout feature, this bit is reserved and kept at reset value.
Bit 10 CTS: CTS flagThis bit is set/reset by hardware. It is an inverted copy of the status of the CTS input pin.
0: CTS line set
1: CTS line reset
Note: If the hardware flow control feature is not supported, this bit is reserved and kept at reset value.
Bit 9 CTSIF: CTS interrupt flagThis bit is set by hardware when the CTS input toggles, if the CTSE bit is set. It is cleared by software, by writing 1 to the CTSCF bit in the USART_ICR register.
An interrupt is generated if CTSIE = 1 in the USART_CR3 register.
0: No change occurred on the CTS status line
1: A change occurred on the CTS status line
Note: If the hardware flow control feature is not supported, this bit is reserved and kept at reset value.
Bit 8 LBDF: LIN break detection flagThis bit is set by hardware when the LIN break is detected. It is cleared by software, by writing 1 to the LBDCF in the USART_ICR.
An interrupt is generated if LBDIE = 1 in the USART_CR2 register.
0: LIN Break not detected
1: LIN break detected
Note: If the USART does not support LIN mode, this bit is reserved and kept at reset value.
Refer to
Section 39.4: USART implementation
.
TXFNF is set by hardware when TXFIFO is not full meaning that data can be written in the USART_TDR. Every write operation to the USART_TDR places the data in the TXFIFO. This flag remains set until the TXFIFO is full. When the TXFIFO is full, this flag is cleared indicating that data can not be written into the USART_TDR.
An interrupt is generated if the TXFNFIE bit = 1 in the USART_CR1 register.
0: Transmit FIFO is full
1: Transmit FIFO is not full
Note: The TXFNF is kept reset during the flush request until TXFIFO is empty. After sending the flush request (by setting TXFRQ bit), the flag TXFNF must be checked prior to writing in TXFIFO (TXFNF and TXFE is set at the same time).
This bit is used during single buffer transmission.
Bit 6 TC: Transmission completeThis bit indicates that the last data written in the USART_TDR has been transmitted out of the shift register.
The TC flag behaves as follows:
- – When TDN = 0, the TC flag is set when the transmission of a frame containing data has completed and when TXE/TXFE is set.
- – When TDN is equal to the number of data in the TXFIFO, the TC flag is set when TXFIFO is empty and TDN is reached.
- – When TDN is greater than the number of data in the TXFIFO, TC remains cleared until the TXFIFO is filled again to reach the programmed number of data to be transferred.
- – When TDN is less than the number of data in the TXFIFO, TC is set when TDN is reached even if the TXFIFO is not empty.
An interrupt is generated if TCIE = 1 in the USART_CR1 register.
The TC bit is cleared by software, by writing 1 to the TCCF of the USART_ICR register, or by writing to the USART_TDR register.
Bit 5 RXFNE: RXFIFO not emptyRXFNE bit is set by hardware when the RXFIFO is not empty, meaning that data can be read from the USART_RDR register. Every read operation from the USART_RDR frees a location in the RXFIFO.
RXFNE is cleared when the RXFIFO is empty. The RXFNE flag can also be cleared by writing 1 to the RXFRQ in the USART_RQR register.
An interrupt is generated if RXFNEIE = 1 in the USART_CR1 register.
0: Data is not received
1: Received data is ready to be read.
Bit 4 IDLE: Idle line detectedThis bit is set by hardware when an Idle Line is detected. An interrupt is generated if IDLEIE = 1 in the USART_CR1 register. It is cleared by software, writing 1 to the IDLECF in the USART_ICR register.
0: No Idle line is detected
1: Idle line is detected
Note: The IDLE bit is not set again until the RXFNE bit has been set (that is, a new idle line occurs).
If mute mode is enabled (MME = 1), IDLE is set if the USART is not mute (RWU = 0), whatever the mute mode selected by the WAKE bit. If RWU = 1, IDLE is not set.
Bit 3 ORE: Overrun errorThis bit is set by hardware when the data currently being received in the shift register is ready to be transferred into the USART_RDR register while RXFF = 1. It is cleared by a software, writing 1 to the ORECF, in the USART_ICR register.
An interrupt is generated if RXFNEIE = 1 in the USART_CR1 register, or EIE = 1 in the USART_CR3 register.
0: No overrun error
1: Overrun error is detected
Note: When this bit is set, the USART_RDR register content is not lost but the shift register is overwritten. An interrupt is generated if the ORE flag is set during multi buffer communication if the EIE bit is set.
This bit is permanently forced to 0 (no overrun detection) when the bit OVRDIS is set in the USART_CR3 register.
Bit 2 NE: Noise detection flagThis bit is set by hardware when noise is detected on a received frame. It is cleared by software, writing 1 to the NFCF bit in the USART_ICR register.
0: No noise is detected
1: Noise is detected
Note: This bit does not generate an interrupt as it appears at the same time as the RXFNE bit which itself generates an interrupt. An interrupt is generated when the NE flag is set during multi buffer communication if the EIE bit is set.
When the line is noise-free, the NE flag can be disabled by programming the ONEBIT bit to 1 to increase the USART tolerance to deviations (Refer to Section 39.5.9: Tolerance of the USART receiver to clock deviation ).
This error is associated with the character in the USART_RDR.
Bit 1 FE : Framing error
This bit is set by hardware when a de-synchronization, excessive noise or a break character is detected. It is cleared by software, writing 1 to the FECF bit in the USART_ICR register.
When transmitting data in smartcard mode, this bit is set when the maximum number of transmit attempts is reached without success (the card NACKs the data frame).
An interrupt is generated if EIE = 1 in the USART_CR3 register.
0: No Framing error is detected
1: Framing error or break character is detected
Note: This error is associated with the character in the USART_RDR.
Bit 0 PE : Parity error
This bit is set by hardware when a parity error occurs in reception mode. It is cleared by software, writing 1 to the PECF in the USART_ICR register.
An interrupt is generated if PEIE = 1 in the USART_CR1 register.
0: No parity error
1: Parity error
Note: This error is associated with the character in the USART_RDR.
39.8.11 USART interrupt and status register [alternate] (USART_ISR)
Address offset: 0x1C
Reset value: 0x0XX0 00C0
XX = 28 if FIFO/smartcard mode supported
XX = 08 if FIFO supported and smartcard mode not supported)
The same register can be used in FIFO mode enabled (previous section) and FIFO mode disabled (this section).
FIFO mode disabled, FIFOEN = 0
| 31 | 30 | 29 | 28 | 27 | 26 | 25 | 24 | 23 | 22 | 21 | 20 | 19 | 18 | 17 | 16 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Res. | Res. | Res. | Res. | Res. | Res. | TCBGT | Res. | Res. | RE ACK | TE ACK | Res. | RWU | SBKF | CMF | BUSY |
| r | r | r | r | r | r | r | |||||||||
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| ABRF | ABRE | UDR | EOBF | RTOF | CTS | CTSIF | LBDF | TXE | TC | RXNE | IDLE | ORE | NE | FE | PE |
| r | r | r | r | r | r | r | r | r | r | r | r | r | r | r | r |
Bits 31:26 Reserved, must be kept at reset value.
Bit 25 TCBGT : Transmission complete before guard time flag
This bit is set when the last data written in the USART_TDR has been transmitted correctly out of the shift register.
It is set by hardware in smartcard mode, if the transmission of a frame containing data has completed, and if the smartcard did not send back any NACK. An interrupt is generated if TCBGTIE = 1 in the USART_CR3 register.
This bit is cleared by software, by writing 1 to the TCBGTCF in the USART_ICR register or by a write to the USART_TDR register.
0: Transmission has not completed or transmission has completed unsuccessfully (that is, a NACK is received from the card)
1: Transmission has not completed successfully (before Guard time completion and there is no NACK from the smart card).
Note: If the USART does not support the smartcard mode, this bit is reserved and kept at reset value. If the USART supports the smartcard mode and the smartcard mode is enabled, the TCBGT reset value is 1. Refer to Section 39.4: USART implementation .
Bits 24:23 Reserved, must be kept at reset value.
Bit 22 REACK : Receive enable acknowledge flag
This bit is set/reset by hardware, when the Receive Enable value is taken into account by the USART.
It can be used to verify that the USART is ready for reception before entering low-power mode.
Note: If the USART does not support the wake-up from Stop feature, this bit is reserved and kept at reset value. Refer to Section 39.4: USART implementation .
Bit 21 TEACK : Transmit enable acknowledge flag
This bit is set/reset by hardware, when the Transmit Enable value is taken into account by the USART.
It can be used when an idle frame request is generated by writing TE = 0, followed by TE = 1 in the USART_CR1 register, in order to respect the TE = 0 minimum period.
Bit 20 Reserved, must be kept at reset value.
Bit 19 RWU : Receiver wake-up from mute mode
This bit indicates if the USART is in mute mode. It is cleared/set by hardware when a wake-up/mute sequence is recognized. The mute mode control sequence (address or IDLE) is selected by the WAKE bit in the USART_CR1 register.
When wake-up on idle mode is selected, this bit can only be set by software, writing 1 to the MMRQ bit in the USART_RQR register.
0: Receiver in active mode
1: Receiver in mute mode
Note: If the USART does not support the wake-up from Stop feature, this bit is reserved and kept at reset value. Refer to Section 39.4: USART implementation .
Bit 18 SBKF : Send break flag
This bit indicates that a send break character was requested. It is set by software, by writing 1 to the SBKRQ bit in the USART_CR3 register. It is automatically reset by hardware during the stop bit of break transmission.
0: No break character transmitted
1: Break character transmitted
Bit 17 CMF: Character match flagThis bit is set by hardware, when the character defined by ADD[7:0] is received. It is cleared by software, writing 1 to the CMCF in the USART_ICR register.
An interrupt is generated if CMIE = 1 in the USART_CR1 register.
0: No Character match detected
1: Character match detected
Bit 16 BUSY: Busy flagThis bit is set and reset by hardware. It is active when a communication is ongoing on the RX line (successful start bit detected). It is reset at the end of the reception (successful or not).
0: USART is idle (no reception)
1: Reception ongoing
Bit 15 ABRF: Auto baud rate flagThis bit is set by hardware when the automatic baud rate has been set (RXNE is also set, generating an interrupt if RXNEIE = 1) or when the auto baud rate operation has completed without success (ABRE = 1) (ABRE, RXNE and FE are also set in this case)
It is cleared by software, in order to request a new auto baud rate detection, by writing 1 to the ABRREQ in the USART_RQR register.
Note: If the USART does not support the auto baud rate feature, this bit is reserved and kept at reset value.
Bit 14 ABRE: Auto baud rate errorThis bit is set by hardware if the baud rate measurement failed (baud rate out of range or character comparison failed)
It is cleared by software, by writing 1 to the ABRREQ bit in the USART_RQR register.
Note: If the USART does not support the auto baud rate feature, this bit is reserved and kept at reset value.
Bit 13 UDR: SPI slave underrun error flagIn slave transmission mode, this flag is set when the first clock pulse for data transmission appears while the software has not yet loaded any value into USART_TDR. This flag is reset by setting UDRCF bit in the USART_ICR register.
0: No underrun error
1: underrun error
Note: If the USART does not support the SPI slave mode, this bit is reserved and kept at reset value. Refer to Section 39.4: USART implementation .
Bit 12 EOBF: End of block flagThis bit is set by hardware when a complete block has been received (for example T = 1 smartcard mode). The detection is done when the number of received bytes (from the start of the block, including the prologue) is equal or greater than BLEN + 4.
An interrupt is generated if EOBIE = 1 in the USART_CR1 register.
It is cleared by software, writing 1 to EOBCF in the USART_ICR register.
0: End of block not reached
1: End of block (number of characters) reached
Note: If smartcard mode is not supported, this bit is reserved and kept at reset value. Refer to Section 39.4: USART implementation .
Bit 11 RTOF: Receiver timeoutThis bit is set by hardware when the timeout value, programmed in the RTOR register has lapsed, without any communication. It is cleared by software, writing 1 to the RTOCF bit in the USART_ICR register.
An interrupt is generated if RTOIE = 1 in the USART_CR2 register.
In smartcard mode, the timeout corresponds to the CWT or BWT timings.
0: Timeout value not reached
1: Timeout value reached without any data reception
Note: If a time equal to the value programmed in RTOR register separates 2 characters, RTOF is not set. If this time exceeds this value + 2 sample times (2/16 or 2/8, depending on the oversampling method), RTOF flag is set.
The counter counts even if RE = 0 but RTOF is set only when RE = 1. If the timeout has already elapsed when RE is set, then RTOF is set.
If the USART does not support the Receiver timeout feature, this bit is reserved and kept at reset value.
Bit 10 CTS: CTS flagThis bit is set/reset by hardware. It is an inverted copy of the status of the CTS input pin.
0: CTS line set
1: CTS line reset
Note: If the hardware flow control feature is not supported, this bit is reserved and kept at reset value.
Bit 9 CTSIF: CTS interrupt flagThis bit is set by hardware when the CTS input toggles, if the CTSE bit is set. It is cleared by software, by writing 1 to the CTSCF bit in the USART_ICR register.
An interrupt is generated if CTSIE = 1 in the USART_CR3 register.
0: No change occurred on the CTS status line
1: A change occurred on the CTS status line
Note: If the hardware flow control feature is not supported, this bit is reserved and kept at reset value.
Bit 8 LBDF: LIN break detection flagThis bit is set by hardware when the LIN break is detected. It is cleared by software, by writing 1 to the LBDCF in the USART_ICR.
An interrupt is generated if LBDIE = 1 in the USART_CR2 register.
0: LIN Break not detected
1: LIN break detected
Note: If the USART does not support LIN mode, this bit is reserved and kept at reset value. Refer to Section 39.4: USART implementation .
Bit 7 TXE: Transmit data register emptyTXE is set by hardware when the content of the USART_TDR register has been transferred into the shift register. It is cleared by writing to the USART_TDR register. The TXE flag can also be set by writing 1 to the TXFRQ in the USART_RQR register, in order to discard the data (only in smartcard T = 0 mode, in case of transmission failure).
An interrupt is generated if the TXEIE bit = 1 in the USART_CR1 register.
0: Data register full
1: Data register empty
Bit 6 TC: Transmission completeThis bit indicates that the last data written in the USART_TDR has been transmitted out of the shift register. The TC flag is set when the transmission of a frame containing data has completed and when TXE is set.
An interrupt is generated if TCIE = 1 in the USART_CR1 register.
TC bit is cleared by software by writing 1 to the TCCF in the USART_ICR register or by writing to the USART_TDR register.
Bit 5 RXNE: Read data register not emptyRXNE bit is set by hardware when the content of the USART_RDR shift register has been transferred to the USART_RDR register. It is cleared by reading from the USART_RDR register. The RXNE flag can also be cleared by writing 1 to the RXFRQ in the USART_RQR register.
An interrupt is generated if RXNEIE = 1 in the USART_CR1 register.
0: Data is not received
1: Received data is ready to be read.
Bit 4 IDLE: Idle line detectedThis bit is set by hardware when an Idle Line is detected. An interrupt is generated if IDLEIE = 1 in the USART_CR1 register. It is cleared by software, writing 1 to the IDLECF in the USART_ICR register.
0: No Idle line is detected
1: Idle line is detected
Note: The IDLE bit is not set again until the RXNE bit has been set (that is, a new idle line occurs).
If mute mode is enabled (MME = 1), IDLE is set if the USART is not mute (RWU = 0), whatever the mute mode selected by the WAKE bit. If RWU = 1, IDLE is not set.
Bit 3 ORE: Overrun errorThis bit is set by hardware when the data currently being received in the shift register is ready to be transferred into the USART_RDR register while RXNE = 1. It is cleared by a software, writing 1 to the ORECF, in the USART_ICR register.
An interrupt is generated if RXNEIE = 1 in the USART_CR1 register, or EIE = 1 in the USART_CR3 register.
1: Overrun error is detected
Note: When this bit is set, the USART_RDR register content is not lost but the shift register is overwritten. An interrupt is generated if the ORE flag is set during multi buffer communication if the EIE bit is set.
This bit is permanently forced to 0 (no overrun detection) when the bit OVRRDIS is set in the USART_CR3 register.
Bit 2 NE: Noise detection flagThis bit is set by hardware when noise is detected on a received frame. It is cleared by software, writing 1 to the NFCF bit in the USART_ICR register.
0: No noise is detected
1: Noise is detected
Note: This bit does not generate an interrupt as it appears at the same time as the RXNE bit which itself generates an interrupt. An interrupt is generated when the NE flag is set during multi buffer communication if the EIE bit is set.
When the line is noise-free, the NE flag can be disabled by programming the ONEBIT bit to 1 to increase the USART tolerance to deviations (Refer to Section 39.5.9: Tolerance of the USART receiver to clock deviation ).
This error is associated with the character in the USART_RDR.
Bit 1 FE : Framing errorThis bit is set by hardware when a de-synchronization, excessive noise or a break character is detected. It is cleared by software, writing 1 to the FECF bit in the USART_ICR register.
When transmitting data in smartcard mode, this bit is set when the maximum number of transmit attempts is reached without success (the card NACKs the data frame).
An interrupt is generated if EIE = 1 in the USART_CR3 register.
0: No Framing error is detected
1: Framing error or break character is detected
Note: This error is associated with the character in the USART_RDR.
Bit 0 PE : Parity errorThis bit is set by hardware when a parity error occurs in reception mode. It is cleared by software, writing 1 to the PECF in the USART_ICR register.
An interrupt is generated if PEIE = 1 in the USART_CR1 register.
0: No parity error
1: Parity error
Note: This error is associated with the character in the USART_RDR.
39.8.12 USART interrupt flag clear register (USART_ICR)
Address offset: 0x20
Reset value: 0x0000 0000
| 31 | 30 | 29 | 28 | 27 | 26 | 25 | 24 | 23 | 22 | 21 | 20 | 19 | 18 | 17 | 16 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | CMCF | Res. |
| w | |||||||||||||||
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| Res. | Res. | UDRCF | EOBCF | RTOCF | Res. | CTSCF | LBDCF | TCBGTCF | TCCF | TXFECF | IDLECF | ORECF | NECF | FECEF | PECF |
| w | w | w | w | w | w | w | w | w | w | w | w | w |
Bits 31:18 Reserved, must be kept at reset value.
Bit 17 CMCF : Character match clear flagWriting 1 to this bit clears the CMF flag in the USART_ISR register.
Bits 16:14 Reserved, must be kept at reset value.
Bit 13 UDRCF : SPI slave underrun clear flagWriting 1 to this bit clears the UDRF flag in the USART_ISR register.
Note: If the USART does not support SPI slave mode, this bit is reserved and must be kept at reset value. Refer to Section 39.4: USART implementation.
Bit 12 EOBCF : End of block clear flagWriting 1 to this bit clears the EOBF flag in the USART_ISR register.
Note: If the USART does not support smartcard mode, this bit is reserved and must be kept at reset value. Refer to Section 39.4: USART implementation.
Bit 11 RTOCF : Receiver timeout clear flagWriting 1 to this bit clears the RTOF flag in the USART_ISR register.
Note: If the USART does not support the Receiver timeout feature, this bit is reserved and must be kept at reset value. Refer to Section 39.4: USART implementation.
Bit 10 Reserved, must be kept at reset value.
Bit 9 CTSCF : CTS clear flag
Writing 1 to this bit clears the CTSIF flag in the USART_ISR register.
Note: If the hardware flow control feature is not supported, this bit is reserved and must be kept at reset value. Refer to Section 39.4: USART implementation .
Bit 8 LBD CF : LIN break detection clear flag
Writing 1 to this bit clears the LBDF flag in the USART_ISR register.
Note: If LIN mode is not supported, this bit is reserved and must be kept at reset value. Refer to Section 39.4: USART implementation .
Bit 7 TCBGTCF : Transmission complete before Guard time clear flag
Writing 1 to this bit clears the TCBGT flag in the USART_ISR register.
Bit 6 TCCF : Transmission complete clear flag
Writing 1 to this bit clears the TC flag in the USART_ISR register.
Bit 5 TXFECF : TXFIFO empty clear flag
Writing 1 to this bit clears the TXFE flag in the USART_ISR register.
Bit 4 IDLECF : Idle line detected clear flag
Writing 1 to this bit clears the IDLE flag in the USART_ISR register.
Bit 3 ORECF : Overrun error clear flag
Writing 1 to this bit clears the ORE flag in the USART_ISR register.
Bit 2 NECF : Noise detected clear flag
Writing 1 to this bit clears the NE flag in the USART_ISR register.
Bit 1 FE CF : Framing error clear flag
Writing 1 to this bit clears the FE flag in the USART_ISR register.
Bit 0 PE CF : Parity error clear flag
Writing 1 to this bit clears the PE flag in the USART_ISR register.
39.8.13 USART receive data register (USART_RDR)
Address offset: 0x24
Reset value: 0x0000 0000
| 31 | 30 | 29 | 28 | 27 | 26 | 25 | 24 | 23 | 22 | 21 | 20 | 19 | 18 | 17 | 16 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. |
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| Res. | Res. | Res. | Res. | Res. | Res. | Res. | RDR[8:0] | ||||||||
| r | r | r | r | r | r | r | r | r | |||||||
Bits 31:9 Reserved, must be kept at reset value.
Bits 8:0 RDR[8:0] : Receive data value
Contains the received data character.
The RDR register provides the parallel interface between the input shift register and the internal bus (see Section 39.5.1: USART block diagram ).
When receiving with the parity enabled, the value read in the MSB bit is the received parity bit.
39.8.14 USART transmit data register (USART_TDR)
Address offset: 0x28
Reset value: 0x0000 0000
| 31 | 30 | 29 | 28 | 27 | 26 | 25 | 24 | 23 | 22 | 21 | 20 | 19 | 18 | 17 | 16 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. |
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| Res. | Res. | Res. | Res. | Res. | Res. | Res. | TDR[8:0] | ||||||||
| rw | rw | rw | rw | rw | rw | rw | rw | rw | |||||||
Bits 31:9 Reserved, must be kept at reset value.
Bits 8:0 TDR[8:0] : Transmit data value
Contains the data character to be transmitted.
The USART_TDR register provides the parallel interface between the internal bus and the output shift register (see Section 39.5.1: USART block diagram ).
When transmitting with the parity enabled (PCE bit set to 1 in the USART_CR1 register), the value written in the MSB (bit 7 or bit 8 depending on the data length) has no effect because it is replaced by the parity.
Note: This register must be written only when TXE/TXFNF = 1.
39.8.15 USART prescaler register (USART_PRESC)
This register can only be written when the USART is disabled (UE = 0).
Address offset: 0x2C
Reset value: 0x0000 0000
| 31 | 30 | 29 | 28 | 27 | 26 | 25 | 24 | 23 | 22 | 21 | 20 | 19 | 18 | 17 | 16 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. |
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | PRESCALER[3:0] | |||
| rw | rw | rw | rw | ||||||||||||
Bits 31:4 Reserved, must be kept at reset value.
Bits 3:0 PRESCALER[3:0] : Clock prescaler
The USART input clock can be divided by a prescaler factor:
- 0000: input clock not divided
- 0001: input clock divided by 2
- 0010: input clock divided by 4
- 0011: input clock divided by 6
- 0100: input clock divided by 8
- 0101: input clock divided by 10
- 0110: input clock divided by 12
- 0111: input clock divided by 16
- 1000: input clock divided by 32
- 1001: input clock divided by 64
- 1010: input clock divided by 128
- 1011: input clock divided by 256
- Others: Reserved, must not be used
Note: When PRESCALER is programmed with a value different of the allowed ones, programmed prescaler value is equal to 1011 that is, input clock divided by 256.
If the prescaler is not supported, this bitfield is reserved and must be kept at reset value. Refer to
Section 39.4: USART implementation
.
39.8.16 USART autonomous mode control register (USART_AUTOCR)
Address offset: 0x30
Reset value: 0x8000 0000
| 31 | 30 | 29 | 28 | 27 | 26 | 25 | 24 | 23 | 22 | 21 | 20 | 19 | 18 | 17 | 16 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | TRIGSEL[3:0] | IDLEDIS | TRIGEN | TRIGPOL | |||
| rw | rw | rw | rw | rw | rw | rw | |||||||||
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| TDN[15:0] | |||||||||||||||
| rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw |
Bits 31:23 Reserved, must be kept at reset value.
Bits 22:19 TRIGSEL[3:0] : Trigger selection bits
Refer to Description of USART interconnections .
This bitfield can be written only when the UE bit is cleared in USART_CR1 register.
0000: usart_trg0 selected
0001: usart_trg1 selected
...
1111: usart_trg15 selected
Note: This bitfield can be written only when the UE bit of USART_CR1 register is cleared.
Bit 18 IDLEDIS : Idle frame transmission disable bit after enabling the transmitter
0: Idle frame sent after enabling the transmitter (TE = 1 in USART_CR1)
1: Idle frame not sent after enabling the transmitter
Note: This bitfield can be written only when the UE bit of USART_CR1 register is cleared.
Bit 17 TRIGEN : Trigger enable bit
0: Trigger disabled
1: Trigger enabled
Note: This bitfield can be written only when the UE bit of USART_CR1 register is cleared.
When a trigger is detected, TE is set to 1 in USART_CR1 and the data transfer is launched.
Bit 16 TRIGPOL : Trigger polarity bit
This bitfield can be written only when the UE bit is cleared in USART_CR1 register.
0: Trigger active on rising edge
1: Trigger active on falling edge
Bits 15:0 TDN[15:0] : TDN transmission data number
This bitfield enables the programming of the number of data to be transmitted. It can be written only when UE is cleared in USART_CR1.
39.8.17 USART register map
Table 384. USART register map and reset values
| Offset | Register name | 31 | 30 | 29 | 28 | 27 | 26 | 25 | 24 | 23 | 22 | 21 | 20 | 19 | 18 | 17 | 16 | 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0x00 | USART_CR1 FIFO mode enabled | RXFFIE | TXFEIE | FIFOEN | M1 | EOBIE | RTOIE | DEAT[4:0] | DEDT[4:0] | OVER8 | CMIE | MME | M0 | WAKE | PCE | PS | PEIE | TXFNFIE | TCIE | RXFNEIE | IDLEIE | TE | RE | UESM | UE | ||||||||
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| 0x00 | USART_CR1 FIFO mode disabled | Res. | Res. | FIFOEN | M1 | EOBIE | RTOIE | DEAT[4:0] | DEDT[4:0] | OVER8 | CMIE | MME | M0 | WAKE | PCE | PS | PEIE | TXEIE | TCIE | RXNEIE | IDLEIE | TE | RE | UESM | UE | ||||||||
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |||
| 0x04 | USART_CR2 | ADD[7:0] | RTOEN | ABRMOD[1:0] | ABREN | MSBFIRST | DATAINV | TXINV | RXINV | SWAP | LINEN | STOP[1:0] | CLKEN | CPOL | CPHA | LBCL | Res. | LBIDIE | LBDL | ADDM7 | DIS_NSS | Res. | Res. | SLVEN | |||||||||
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| 0x08 | USART_CR3 FIFO mode enabled | TXFTCF[2:0] | RXFTIE | RXFTCF[2:0] | TCBGTIE | TXFTIE | Res. | Res. | Res. | SCAR CNT[2:0] | Res. | DEP | DEM | DDRE | OVRDIS | ONEBIT | CTSIE | CTSE | RTSE | DMAT | DMAR | SCEN | NACK | HDSEL | IRLP | IREN | EIE | ||||||
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |||||
| 0x08 | USART_CR3 FIFO mode disabled | Res. | Res. | Res. | Res. | Res. | Res. | TCBGTIE | Res. | Res. | Res. | Res. | SCAR CNT[2:0] | Res. | DEP | DEM | DDRE | OVRDIS | ONEBIT | CTSIE | CTSE | RTSE | DMAT | DMAR | SCEN | NACK | HDSEL | IRLP | IREN | EIE | |||
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |||||||||||||
| 0x0C | USART_BRR | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | BRR[15:0] | |||||||||||||||
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |||||||||||||||||
| 0x10 | USART_GTPR | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | GT[7:0] | PSC[7:0] | ||||||||||||||
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |||||||||||||||||
Table 384. USART register map and reset values (continued)
| Offset | Register name | 31 | 30 | 29 | 28 | 27 | 26 | 25 | 24 | 23 | 22 | 21 | 20 | 19 | 18 | 17 | 16 | 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | |||
| 0x14 | USART_RTOR | BLEN[7:0] | RTO[23:0] | |||||||||||||||||||||||||||||||
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||
| 0x18 | USART_RQR | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | TXFRQ | RXFRQ | MMRQ | SBKRQ | ABRRQ |
| Reset value | 0 | 0 | 0 | 0 | 0 | |||||||||||||||||||||||||||||
| 0x1C | USART_ISR FIFO mode enabled | Res. | Res. | Res. | Res. | TXFT | RXFT | TCBGT | RXFF | TXFE | REACK | TEACK | Res. | RWU | SBKF | CMF | BUSY | ABRF | ABRE | UDR | EOBF | RTOF | CTS | CTSIF | LBDF | TXFNF | TC | RXFNE | IDLE | ORE | NE | FE | PE | |
| Reset value | 0 | 0 | X | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |||||||
| 0x1C | USART_ISR FIFO mode disabled | Res. | Res. | Res. | Res. | Res. | Res. | TCBGT | Res. | Res. | REACK | TEACK | Res. | RWU | SBKF | CMF | BUSY | ABRF | ABRE | UDR | EOBF | RTOF | CTS | CTSIF | LBDF | TXE | TC | RXNE | IDLE | ORE | NE | FE | PE | |
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |||||||||||
| 0x20 | USART_ICR | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | CMCF | Res. | Res. | Res. | UDRCF | EOBCF | RTOCF | Res. | CTSCF | LBDCF | TCBGTCF | TOCF | TXFECF | IDLECF | ORECF | NECF | FECEF | PECEF | |
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||||||||||||||||||||
| 0x24 | USART_RDR | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. |
| Reset value | ||||||||||||||||||||||||||||||||||
| 0x28 | USART_TDR | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. |
| Reset value | ||||||||||||||||||||||||||||||||||
| 0x2C | USART_PRESC | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. |
| Reset value | ||||||||||||||||||||||||||||||||||
| 0x30 | USART_AUTOCR | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. |
| Reset value | ||||||||||||||||||||||||||||||||||