17. Advanced-control timers (TIM1)
17.1 TIM1 introduction
The advanced-control timers (TIM1) consist of a 16-bit auto-reload counter driven by a programmable prescaler.
It may be used for a variety of purposes, including measuring the pulse lengths of input signals (input capture) or generating output waveforms (output compare, PWM, complementary PWM with dead-time insertion).
Pulse lengths and waveform periods can be modulated from a few microseconds to several milliseconds using the timer prescaler and the RCC clock controller prescalers.
The advanced-control (TIM1) and general-purpose (TIMx) timers are completely independent, and do not share any resources. They can be synchronized together as described in Section 17.3.20 .
17.2 TIM1 main features
TIM1 timer features include:
- • 16-bit up, down, up/down auto-reload counter.
- • 16-bit programmable prescaler allowing dividing (also “on the fly”) the counter clock frequency either by any factor between 1 and 65535.
- • Up to 4 independent channels for:
- – Input Capture
- – Output Compare
- – PWM generation (Edge- and Center-aligned modes)
- – One-pulse mode output
- • Complementary outputs with programmable dead-time
- • Synchronization circuit to control the timer with external signals and to interconnect several timers together.
- • Repetition counter to update the timer registers only after a given number of cycles of the counter.
- • Break input to put the timer’s output signals in reset state or in a known state.
- • Interrupt/DMA generation on the following events:
- – Update: counter overflow/underflow, counter initialization (by software or internal/external trigger)
- – Trigger event (counter start, stop, initialization or count by internal/external trigger)
- – Input capture
- – Output compare
- – Break input
- • Supports incremental (quadrature) encoder and hall-sensor circuitry for positioning purposes
- • Trigger input for external clock or cycle-by-cycle current management
Figure 63. Advanced-control timer block diagram
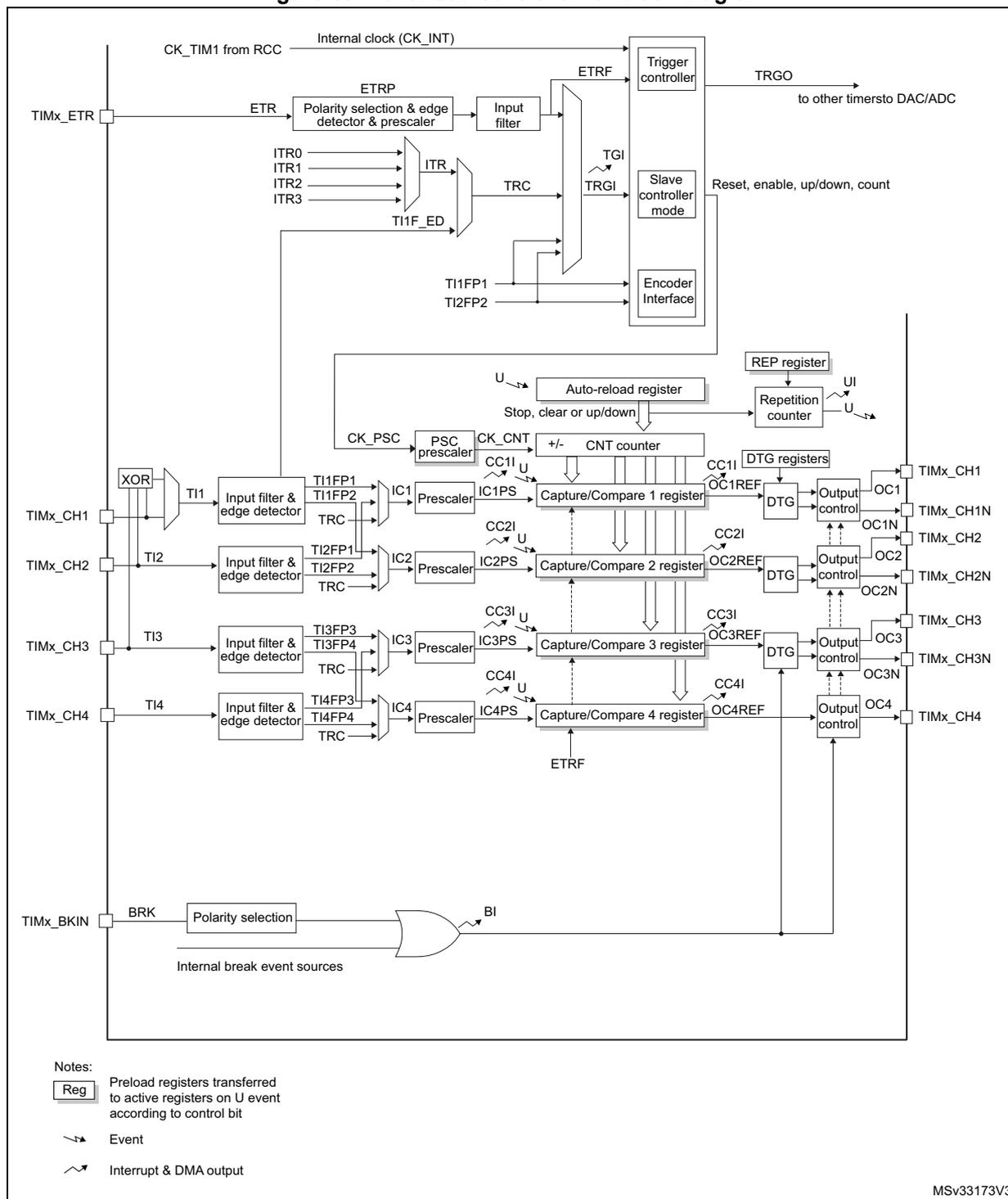
The diagram illustrates the internal architecture of an advanced-control timer (TIM1). At the top, the internal clock (CK_INT) from the RCC is connected to the Trigger controller, Slave controller mode, and Encoder Interface. The TIMx_ETR pin is connected to a polarity selection & edge detector & prescaler, which outputs ETRP. This is followed by an input filter and then the Trigger controller. The ITR0, ITR1, ITR2, and ITR3 pins are connected to an ITR multiplexer, which outputs TRC. The TI1FP1 and TI2FP2 pins are connected to the Encoder Interface. The Trigger controller outputs TRGO to other timers/DAC/ADC. The Slave controller mode receives TRGI from the Trigger controller and TRC from the ITR multiplexer, and outputs Reset, enable, up/down, and count signals. The Encoder Interface receives TI1FP1 and TI2FP2 signals. Below the controllers, the Auto-reload register and REP register are shown. The Auto-reload register is connected to the CNT counter and receives Stop, clear or up/down signals. The REP register is connected to the Repetition counter and receives U (update) signals. The CNT counter is connected to the Auto-reload register and the four Capture/Compare registers. The CK_PSC prescaler is connected to the CNT counter and receives CK_PSC signals. The four Capture/Compare registers (CC1, CC2, CC3, CC4) are connected to the CNT counter and receive CC1I, CC2I, CC3I, and CC4I signals. Each register is also connected to a prescaler and an input filter & edge detector. The input filters receive TI1, TI2, TI3, and TI4 signals. The prescalers output IC1PS, IC2PS, IC3PS, and IC4PS signals to the registers. The registers also output OC1REF, OC2REF, OC3REF, and OC4REF signals to the DTG registers. The DTG registers output OC1, OC1N, OC2, OC2N, OC3, OC3N, OC4, and OC4N signals to the TIMx_CH1, TIMx_CH1N, TIMx_CH2, TIMx_CH2N, TIMx_CH3, TIMx_CH3N, TIMx_CH4, and TIMx_CH4 pins. The TIMx_BKIN pin is connected to a polarity selection block, which outputs BRK. Internal break event sources are also connected to this block. The BRK signal is ORed with the internal break event sources to produce the BI signal, which is connected to the DTG registers.
Notes:
Reg
Preload registers transferred to active registers on U event according to control bit
Event
Interrupt & DMA output
MSV33173V3
17.3 TIM1 functional description
17.3.1 Time-base unit
The main block of the programmable advanced-control timer is a 16-bit counter with its related auto-reload register. The counter can count up, down or both up and down. The counter clock can be divided by a prescaler.
The counter, the auto-reload register and the prescaler register can be written or read by software. This is true even when the counter is running.
The time-base unit includes:
- • Counter register (TIMx_CNT)
- • Prescaler register (TIMx_PSC)
- • Auto-reload register (TIMx_ARR)
- • Repetition counter register (TIMx_RCR)
The auto-reload register is preloaded. Writing to or reading from the auto-reload register accesses the preload register. The content of the preload register are transferred into the shadow register permanently or at each update event (UEV), depending on the auto-reload preload enable bit (ARPE) in TIMx_CR1 register. The update event is sent when the counter reaches the overflow (or underflow when downcounting) and if the UDIS bit equals 0 in the TIMx_CR1 register. It can also be generated by software. The generation of the update event is described in detailed for each configuration.
The counter is clocked by the prescaler output CK_CNT, which is enabled only when the counter enable bit (CEN) in TIMx_CR1 register is set (refer also to the slave mode controller description to get more details on counter enabling).
Note that the counter starts counting 1 clock cycle after setting the CEN bit in the TIMx_CR1 register.
Prescaler description
The prescaler can divide the counter clock frequency by any factor between 1 and 65536. It is based on a 16-bit counter controlled through a 16-bit register (in the TIMx_PSC register). It can be changed on the fly as this control register is buffered. The new prescaler ratio is taken into account at the next update event.
Figure 65 and Figure 66 give some examples of the counter behavior when the prescaler ratio is changed on the fly:
Figure 64. Counter timing diagram with prescaler division change from 1 to 2
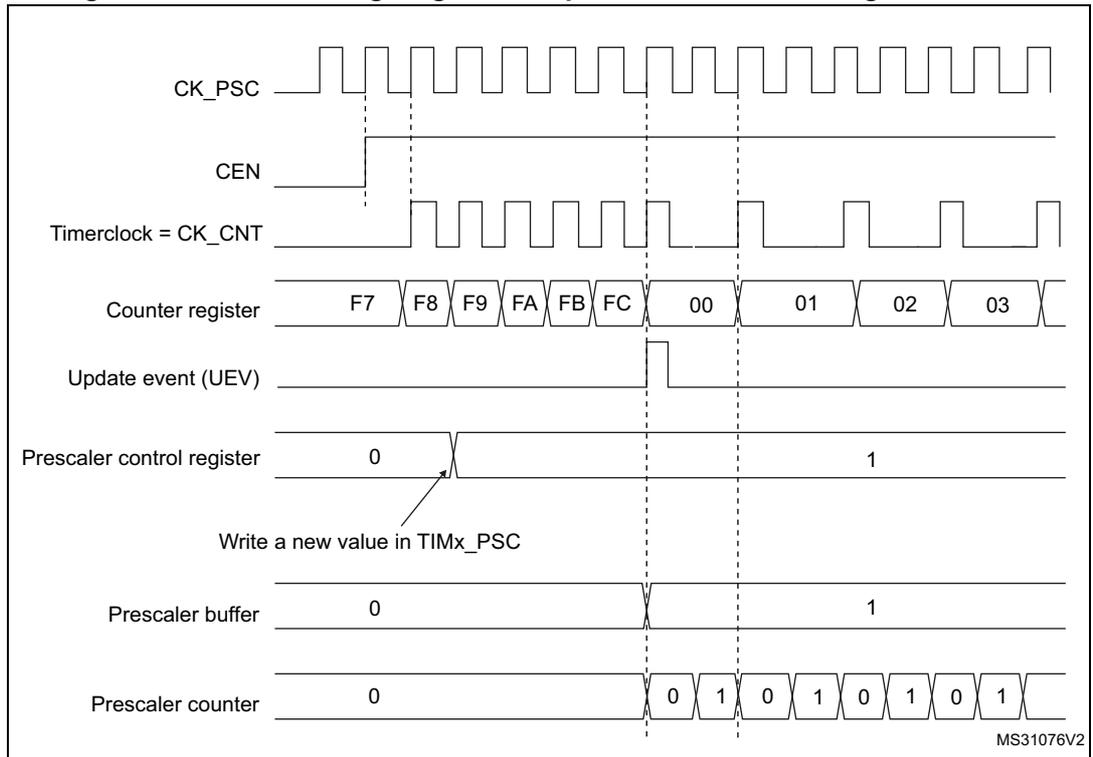
This timing diagram illustrates the behavior of the timer when the prescaler division is changed from 1 to 2. The signals shown are:
- CK_PSC : Prescaler input clock signal.
- CEN : Counter Enable signal, which is active high.
- Timerclock = CK_CNT : The clock signal for the counter, derived from the prescaler output.
- Counter register : Shows hexadecimal values F7, F8, F9, FA, FB, FC, followed by 00, 01, 02, 03.
- Update event (UEV) : Generated when the counter reaches 00.
- Prescaler control register : Initially set to 0 (division 1). A new value of 1 (division 2) is written to TIMx_PSC. The change takes effect at the next update event.
- Prescaler buffer : Latches the new prescaler value of 1 at the update event.
- Prescaler counter : Counts from 0 to 1 when the division is 2. The sequence shown is 0, 1, 0, 1, 0, 1, 0, 1.
Vertical dashed lines indicate key timing points: the first at the rising edge of CK_PSC after CEN goes high, and the second at the update event (UEV) when the counter rolls over from FC to 00. The text 'MS31076V2' is in the bottom right corner.
Figure 65. Counter timing diagram with prescaler division change from 1 to 4
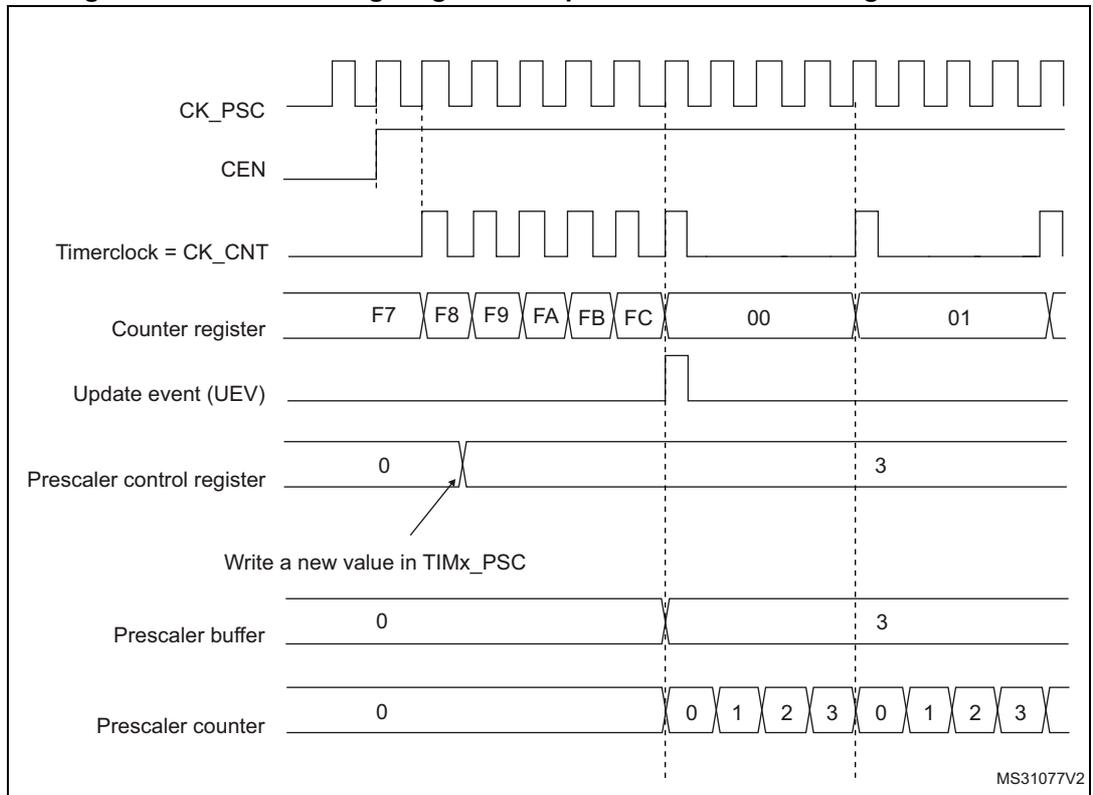
This timing diagram illustrates the behavior of the timer when the prescaler division is changed from 1 to 4. The signals shown are:
- CK_PSC : Prescaler input clock signal.
- CEN : Counter Enable signal, which is active high.
- Timerclock = CK_CNT : The clock signal for the counter, derived from the prescaler output.
- Counter register : Shows hexadecimal values F7, F8, F9, FA, FB, FC, followed by 00, 01.
- Update event (UEV) : Generated when the counter reaches 00.
- Prescaler control register : Initially set to 0 (division 1). A new value of 3 (division 4) is written to TIMx_PSC. The change takes effect at the next update event.
- Prescaler buffer : Latches the new prescaler value of 3 at the update event.
- Prescaler counter : Counts from 0 to 3 when the division is 4. The sequence shown is 0, 1, 2, 3, 0, 1, 2, 3.
Vertical dashed lines indicate key timing points: the first at the rising edge of CK_PSC after CEN goes high, and the second at the update event (UEV) when the counter rolls over from FC to 00. The text 'MS31077V2' is in the bottom right corner.
17.3.2 Counter modes
Upcounting mode
In upcounting mode, the counter counts from 0 to the auto-reload value (content of the TIMx_ARR register), then restarts from 0 and generates a counter overflow event.
If the repetition counter is used, the update event (UEV) is generated after upcounting is repeated for the number of times programmed in the repetition counter register (TIMx_RCR). Else the update event is generated at each counter overflow.
Setting the UG bit in the TIMx_EGR register (by software or by using the slave mode controller) also generates an update event.
The UEV event can be disabled by software by setting the UDIS bit in the TIMx_CR1 register. This is to avoid updating the shadow registers while writing new values in the preload registers. Then no update event occurs until the UDIS bit has been written to 0. However, the counter restarts from 0, as well as the counter of the prescaler (but the prescale rate does not change). In addition, if the URS bit (update request selection) in TIMx_CR1 register is set, setting the UG bit generates an update event UEV but without setting the UIF flag (thus no interrupt or DMA request is sent). This is to avoid generating both update and capture interrupts when clearing the counter on the capture event.
When an update event occurs, all the registers are updated and the update flag (UIF bit in TIMx_SR register) is set (depending on the URS bit):
- • The repetition counter is reloaded with the content of TIMx_RCR register,
- • The auto-reload shadow register is updated with the preload value (TIMx_ARR),
- • The buffer of the prescaler is reloaded with the preload value (content of the TIMx_PSC register).
The following figures show some examples of the counter behavior for different clock frequencies when TIMx_ARR=0x36.
Figure 66. Counter timing diagram, internal clock divided by 1
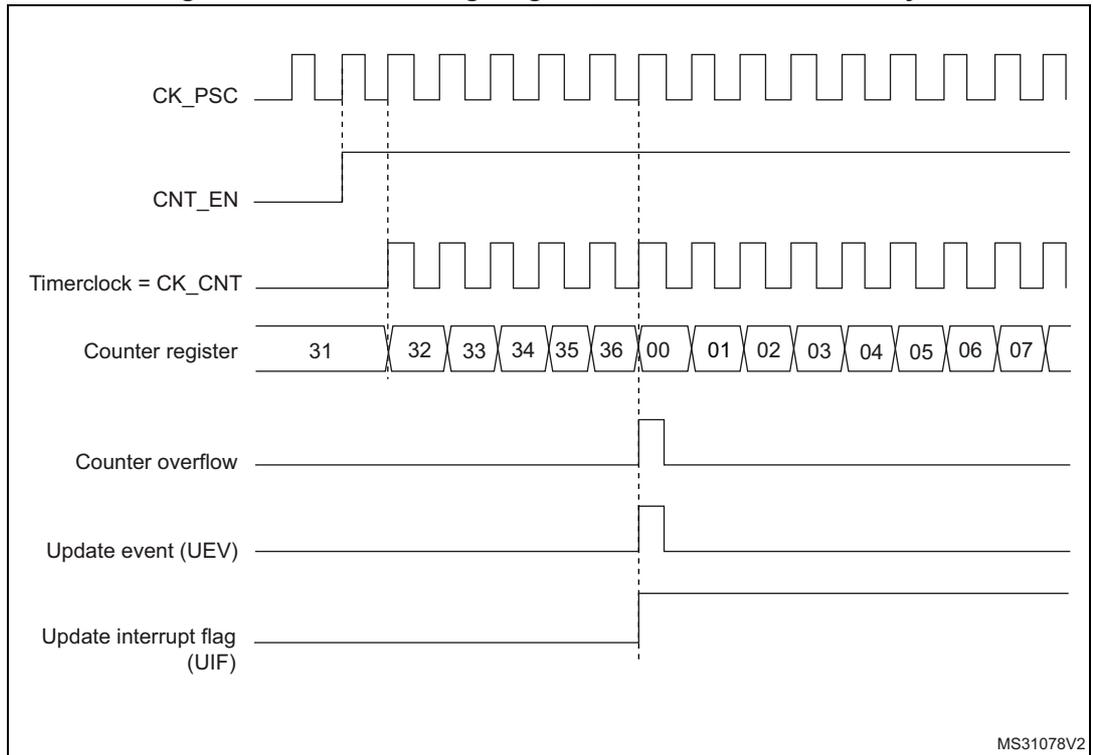
This timing diagram illustrates the operation of a timer with the internal clock divided by 1. The signals shown are:
- CK_PSC : Prescaler clock signal, shown as a square wave.
- CNT_EN : Counter enable signal, which goes high to start counting.
- Timerclock = CK_CNT : The clock signal for the counter, which is the output of the prescaler.
- Counter register : Shows the sequence of counter values: 31, 32, 33, 34, 35, 36, 00, 01, 02, 03, 04, 05, 06, 07. The values 31 through 36 are shown in a single block, indicating a rollover from 36 back to 00.
- Counter overflow : A pulse generated when the counter reaches its maximum value (36) and rolls over to 00.
- Update event (UEV) : A pulse generated when the counter rolls over.
- Update interrupt flag (UIF) : A signal that goes high when an update event occurs.
Vertical dashed lines indicate the timing relationships between the signals. The counter increments on the rising edges of the timerclock. The overflow, UEV, and UIF signals are synchronized with the counter roll-over event.
MS31078V2
Figure 67. Counter timing diagram, internal clock divided by 2
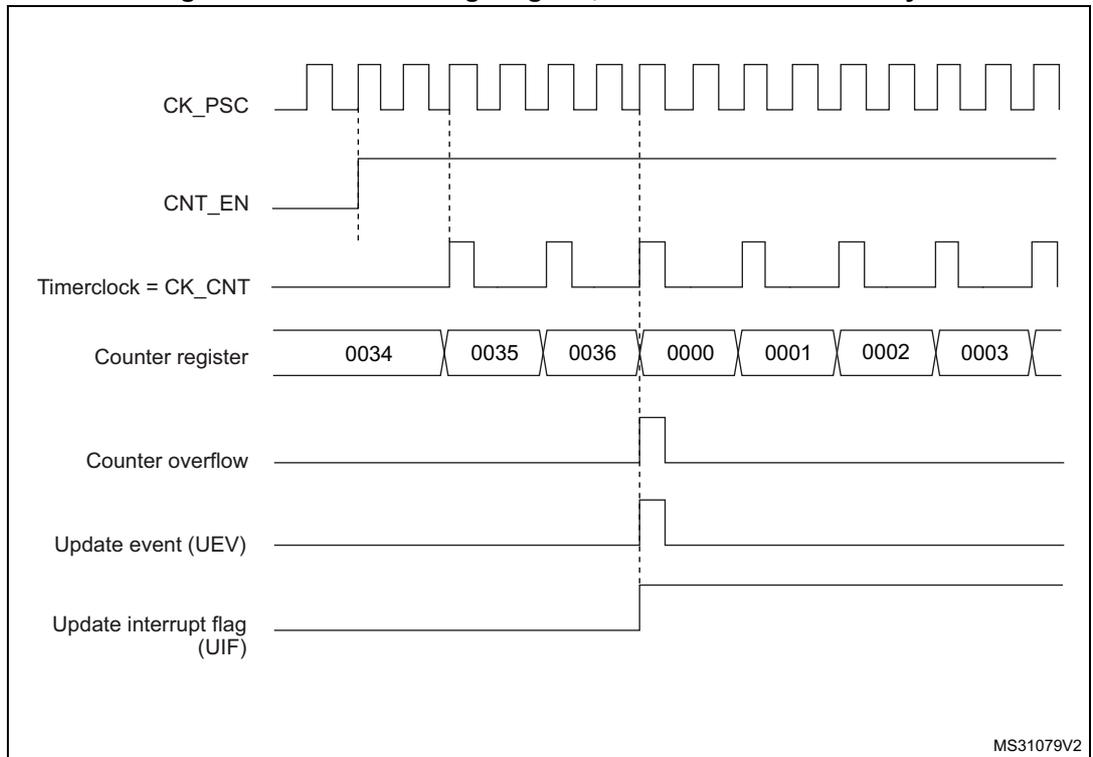
This timing diagram illustrates the operation of a timer with the internal clock divided by 2. The signals shown are:
- CK_PSC : Prescaler clock signal, shown as a square wave.
- CNT_EN : Counter enable signal, which goes high to start counting.
- Timerclock = CK_CNT : The clock signal for the counter, which is half the frequency of the prescaler clock.
- Counter register : Shows the sequence of counter values: 0034, 0035, 0036, 0000, 0001, 0002, 0003. The values 0034 through 0036 are shown in a single block, indicating a rollover from 0036 back to 0000.
- Counter overflow : A pulse generated when the counter reaches its maximum value (0036) and rolls over to 0000.
- Update event (UEV) : A pulse generated when the counter rolls over.
- Update interrupt flag (UIF) : A signal that goes high when an update event occurs.
Vertical dashed lines indicate the timing relationships between the signals. The counter increments on the rising edges of the timerclock. The overflow, UEV, and UIF signals are synchronized with the counter roll-over event.
MS31079V2
Figure 68. Counter timing diagram, internal clock divided by 4
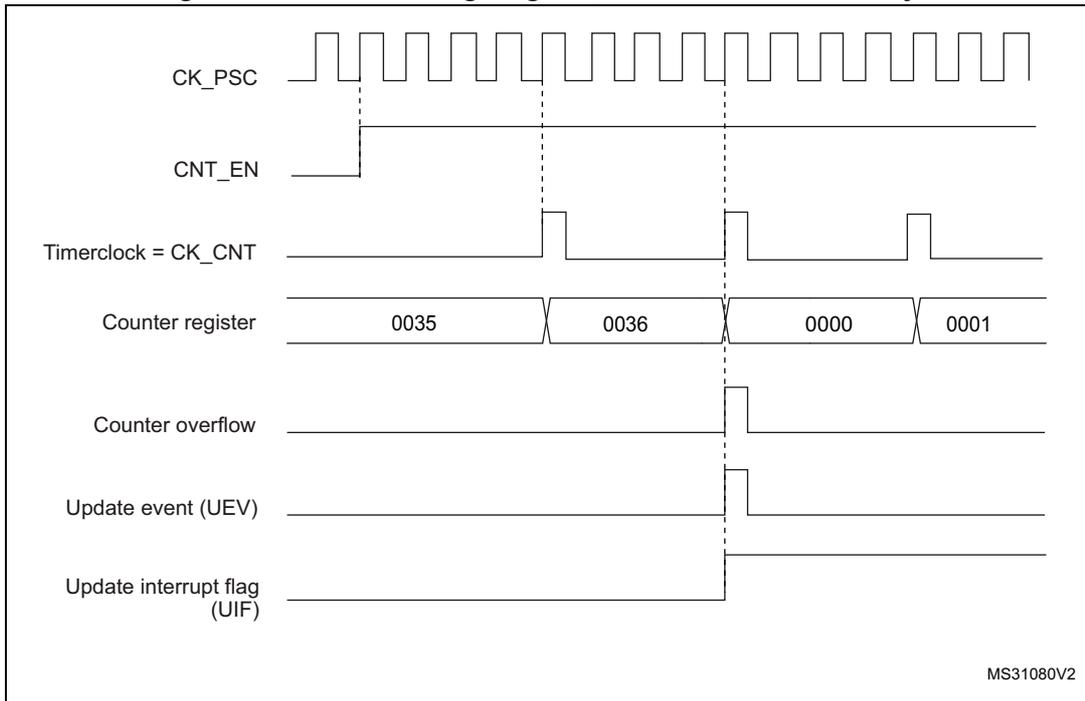
This timing diagram illustrates the operation of a timer when the internal clock is divided by 4. The top signal, CK_PSC, is a periodic square wave. Below it, CNT_EN is a high-level signal that enables the counter. The Timerclock = CK_CNT signal is a square wave derived from CK_PSC, with a frequency that is one-fourth of the CK_PSC frequency. The Counter register shows a sequence of values: 0035, 0036, 0000, and 0001. Vertical dashed lines indicate the rising edges of the Timerclock. At the first rising edge after CNT_EN goes high, the counter increments from 0035 to 0036. At the next rising edge, the counter overflows from 0036 to 0000, triggering a pulse on the Counter overflow signal. Simultaneously, an Update event (UEV) occurs, and the Update interrupt flag (UIF) is set. At the subsequent rising edge, the counter increments from 0000 to 0001. The diagram is labeled MS31080V2 in the bottom right corner.
Figure 69. Counter timing diagram, internal clock divided by N
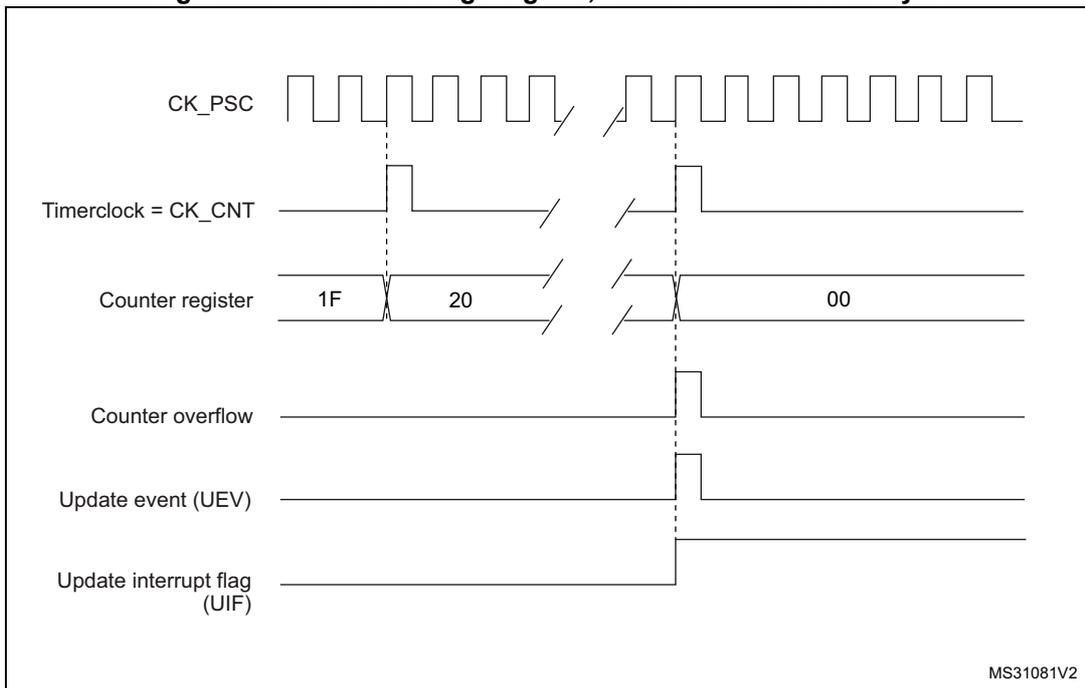
This timing diagram illustrates the operation of a timer when the internal clock is divided by an arbitrary factor N. The top signal, CK_PSC, is a periodic square wave. Below it, the Timerclock = CK_CNT signal is shown with a break in the waveform, indicating it is a divided version of CK_PSC. The Counter register shows values 1F, 20, and 00, with breaks in the sequence between them. Vertical dashed lines mark the rising edges of the Timerclock. At the first rising edge, the counter increments from 1F to 20. At the next rising edge, the counter overflows from 20 to 00, triggering a pulse on the Counter overflow signal. Simultaneously, an Update event (UEV) occurs, and the Update interrupt flag (UIF) is set. The diagram is labeled MS31081V2 in the bottom right corner.
Figure 70. Counter timing diagram, update event when ARPE=0
(TIMx_ARR not preloaded)
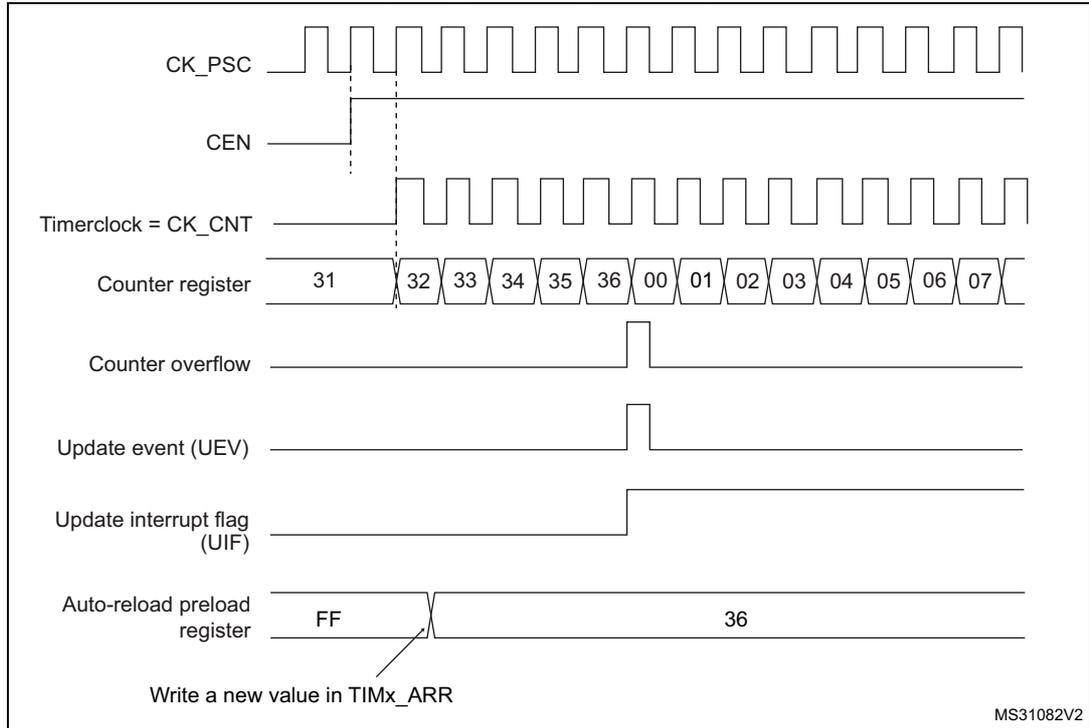
This timing diagram illustrates the counter's operation when ARPE=0. The CK_PSC signal is a periodic clock. CEN is an active-low enable signal. The Timerclock (CK_CNT) is derived from CK_PSC. The Counter register starts at 31, overflows to 00, and continues counting up to 07. A Counter overflow pulse occurs at the transition from 31 to 00. An Update event (UEV) and the Update interrupt flag (UIF) are generated at the overflow. The Auto-reload preload register is initially FF and is updated to 36. An arrow indicates that writing a new value in TIMx_ARR updates the preload register.
MS31082V2
Figure 71. Counter timing diagram, update event when ARPE=1
(TIMx_ARR preloaded)
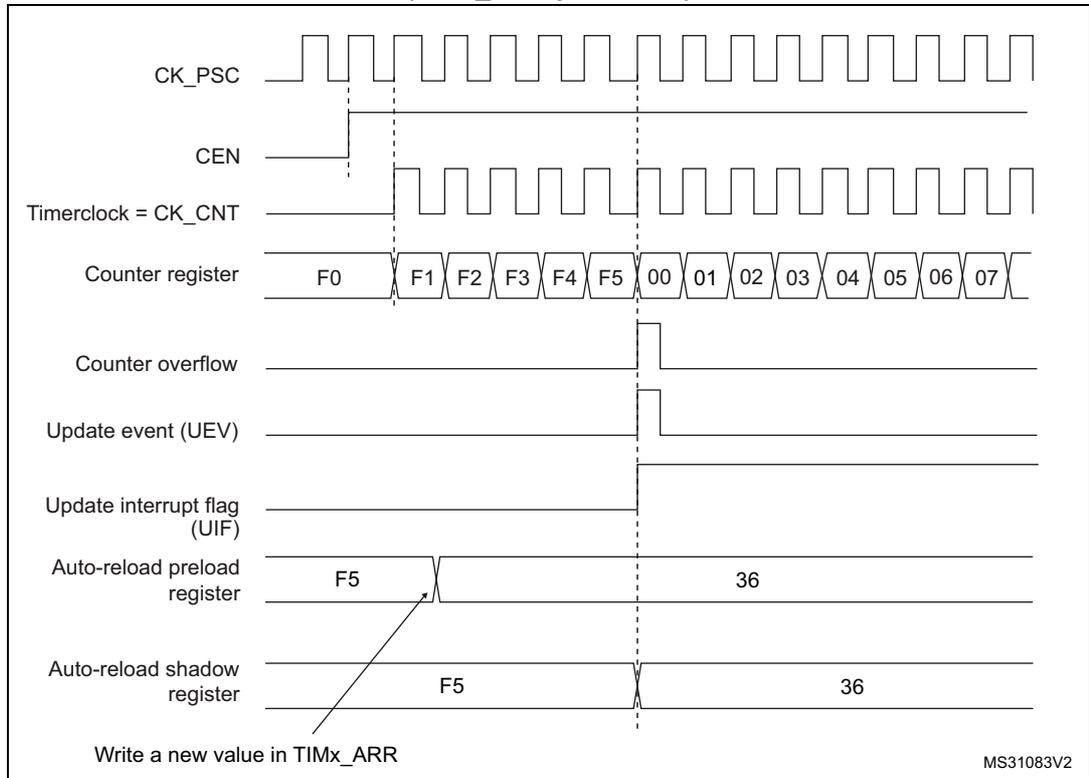
This timing diagram illustrates the counter's operation when ARPE=1. The CK_PSC signal is a periodic clock. CEN is an active-low enable signal. The Timerclock (CK_CNT) is derived from CK_PSC. The Counter register starts at F0, overflows to 00, and continues counting up to 07. A Counter overflow pulse occurs at the transition from F0 to 00. An Update event (UEV) and the Update interrupt flag (UIF) are generated at the overflow. The Auto-reload preload register is initially F5 and is updated to 36. The Auto-reload shadow register is initially F5 and is updated to 36. An arrow indicates that writing a new value in TIMx_ARR updates the preload register, which is then copied to the shadow register at the next update event.
MS31083V2
Downcounting mode
In downcounting mode, the counter counts from the auto-reload value (content of the TIMx_ARR register) down to 0, then restarts from the auto-reload value and generates a counter underflow event.
If the repetition counter is used, the update event (UEV) is generated after downcounting is repeated for the number of times programmed in the repetition counter register (TIMx_RCR). Else the update event is generated at each counter underflow.
Setting the UG bit in the TIMx_EGR register (by software or by using the slave mode controller) also generates an update event.
The UEV update event can be disabled by software by setting the UDIS bit in TIMx_CR1 register. This is to avoid updating the shadow registers while writing new values in the preload registers. Then no update event occurs until UDIS bit has been written to 0. However, the counter restarts from the current auto-reload value, whereas the counter of the prescaler restarts from 0 (but the prescale rate doesn't change).
In addition, if the URS bit (update request selection) in TIMx_CR1 register is set, setting the UG bit generates an update event UEV but without setting the UIF flag (thus no interrupt or DMA request is sent). This is to avoid generating both update and capture interrupts when clearing the counter on the capture event.
When an update event occurs, all the registers are updated and the update flag (UIF bit in TIMx_SR register) is set (depending on the URS bit):
- • The repetition counter is reloaded with the content of TIMx_RCR register
- • The buffer of the prescaler is reloaded with the preload value (content of the TIMx_PSC register)
- • The auto-reload active register is updated with the preload value (content of the TIMx_ARR register). Note that the auto-reload is updated before the counter is reloaded, so that the next period is the expected one
The following figures show some examples of the counter behavior for different clock frequencies when TIMx_ARR=0x36.
Figure 72. Counter timing diagram, internal clock divided by 1
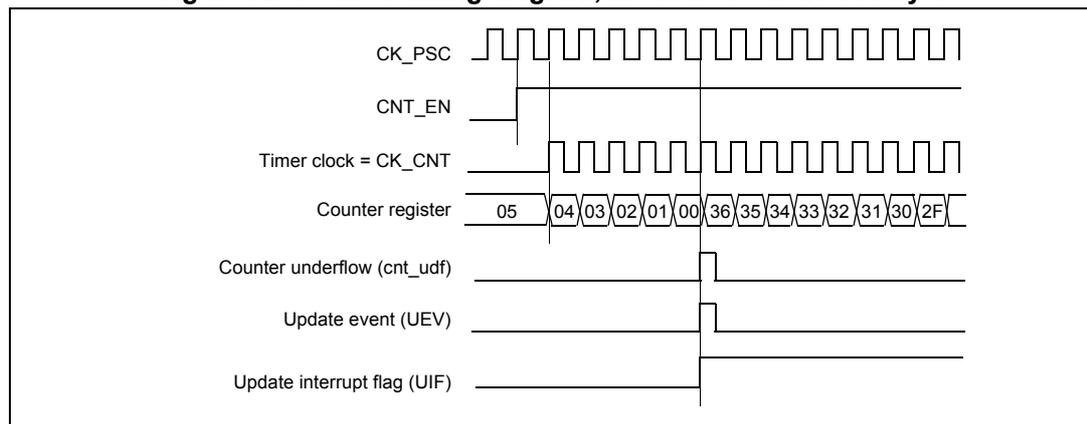
The timing diagram illustrates the counter's behavior in downcounting mode. The signals shown are:
- CK_PSC : Prescaler clock signal, shown as a square wave.
- CNT_EN : Counter enable signal, which is high to enable counting.
- Timer clock = CK_CNT : The clock signal for the counter, derived from CK_PSC.
- Counter register : Shows the counter values decreasing from 05 down to 00, then reloading to 36 (0x24) and continuing to 2F (0x1F).
- Counter underflow (cnt_udf) : A pulse generated when the counter reaches 00.
- Update event (UEV) : A pulse generated when the counter underflows.
- Update interrupt flag (UIF) : A signal that goes high when an update event occurs.
Figure 73. Counter timing diagram, internal clock divided by 2
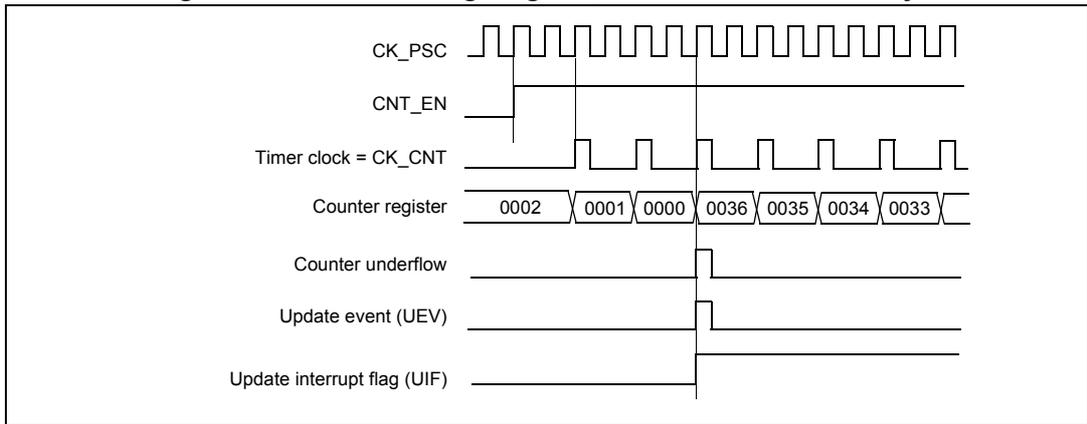
Figure 74. Counter timing diagram, internal clock divided by 4
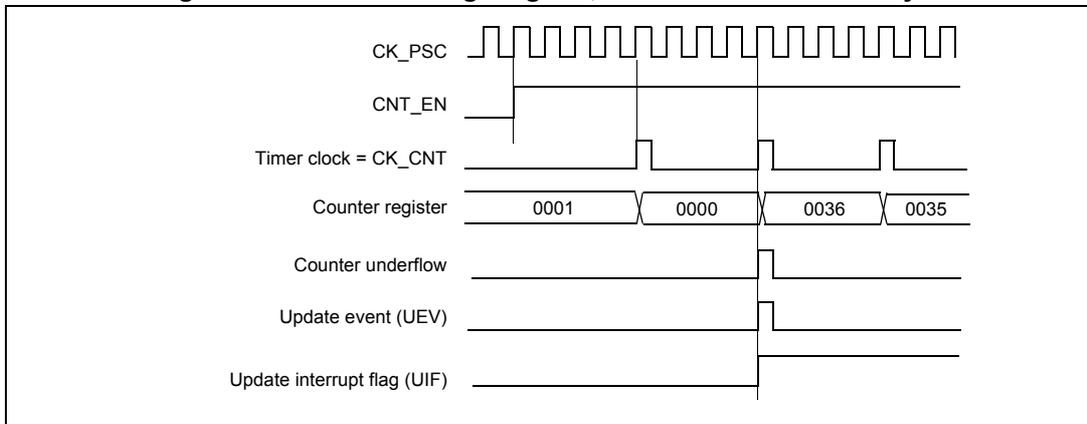
Figure 75. Counter timing diagram, internal clock divided by N
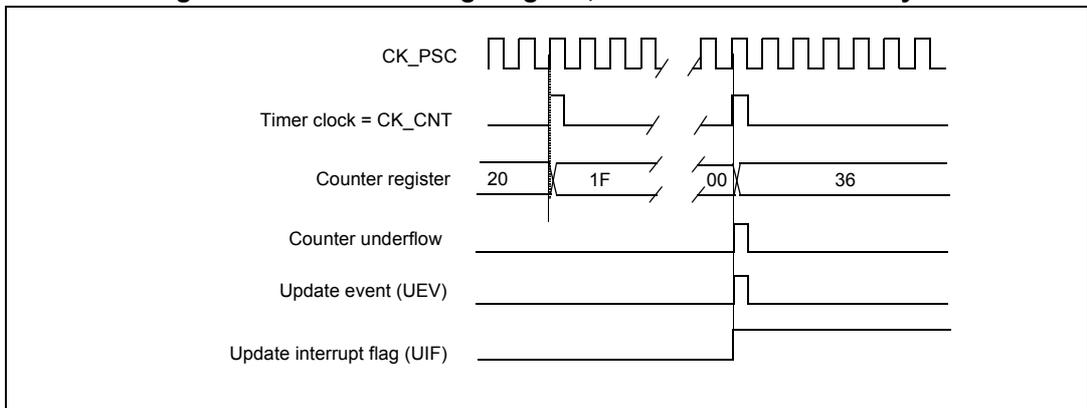
Figure 76. Counter timing diagram, update event when repetition counter is not used
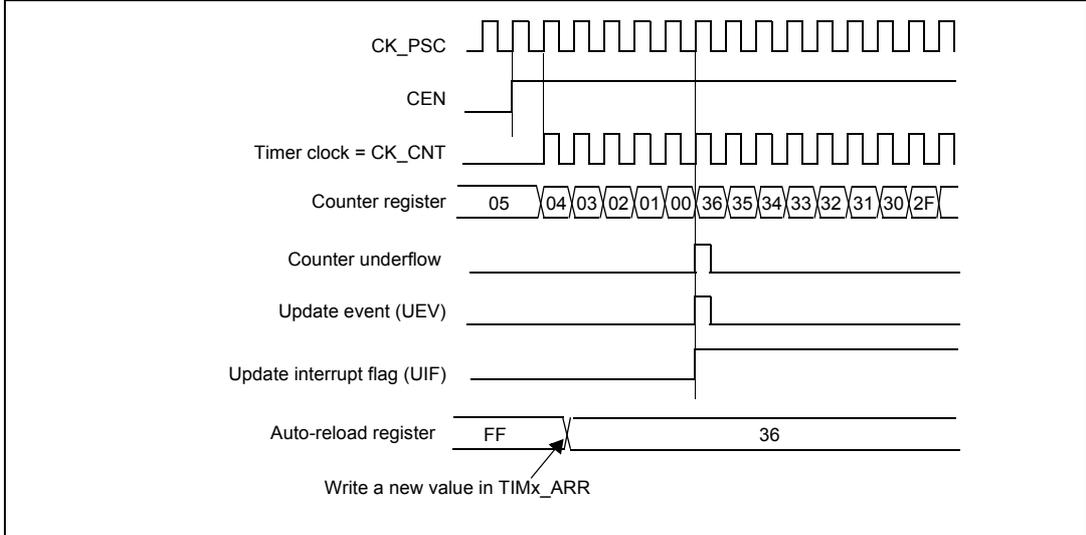
The diagram illustrates the timing of a timer counter. The top signal, CK_PSC, is a periodic clock. Below it, CEN (Counter Enable) is shown as a high-level signal. The 'Timer clock = CK_CNT' is derived from CK_PSC. The 'Counter register' shows a sequence of values: 05, 04, 03, 02, 01, 00, followed by a rollover to 36, 35, 34, 33, 32, 31, 30, 2F. A 'Counter underflow' pulse occurs when the counter reaches 00. An 'Update event (UEV)' is generated at the underflow. The 'Update interrupt flag (UIF)' is set by the UEV. The 'Auto-reload register' contains the value FF (15 in decimal) and 36 (54 in decimal). An arrow points to the register with the text 'Write a new value in TIMx_ARR'.
Center-aligned mode (up/down counting)
In center-aligned mode, the counter counts from 0 to the auto-reload value (content of the TIMx_ARR register) – 1, generates a counter overflow event, then counts from the auto-reload value down to 1 and generates a counter underflow event. Then it restarts counting from 0.
Center-aligned mode is active when the CMS bits in TIMx_CR1 register are not equal to '00'. The Output compare interrupt flag of channels configured in output is set when: the counter counts down (Center aligned mode 1, CMS = "01"), the counter counts up (Center aligned mode 2, CMS = "10") the counter counts up and down (Center aligned mode 3, CMS = "11").
In this mode, the DIR direction bit in the TIMx_CR1 register cannot be written. It is updated by hardware and gives the current direction of the counter.
The update event can be generated at each counter overflow and at each counter underflow or by setting the UG bit in the TIMx_EGR register (by software or by using the slave mode controller) also generates an update event. In this case, the counter restarts counting from 0, as well as the counter of the prescaler.
The UEV update event can be disabled by software by setting the UDIS bit in the TIMx_CR1 register. This is to avoid updating the shadow registers while writing new values in the preload registers. Then no update event occurs until UDIS bit has been written to 0. However, the counter continues counting up and down, based on the current auto-reload value.
In addition, if the URS bit (update request selection) in TIMx_CR1 register is set, setting the UG bit generates an UEV update event but without setting the UIF flag (thus no interrupt or DMA request is sent). This is to avoid generating both update and capture interrupts when clearing the counter on the capture event.
When an update event occurs, all the registers are updated and the update flag (UIF bit in TIMx_SR register) is set (depending on the URS bit):
- • The repetition counter is reloaded with the content of TIMx_RCR register
- • The buffer of the prescaler is reloaded with the preload value (content of the TIMx_PSC register)
- • The auto-reload active register is updated with the preload value (content of the TIMx_ARR register). Note that if the update source is a counter overflow, the auto-reload is updated before the counter is reloaded, so that the next period is the expected one (the counter is loaded with the new value).
The following figures show some examples of the counter behavior for different clock frequencies.
Figure 77. Counter timing diagram, internal clock divided by 1, TIMx_ARR = 0x6
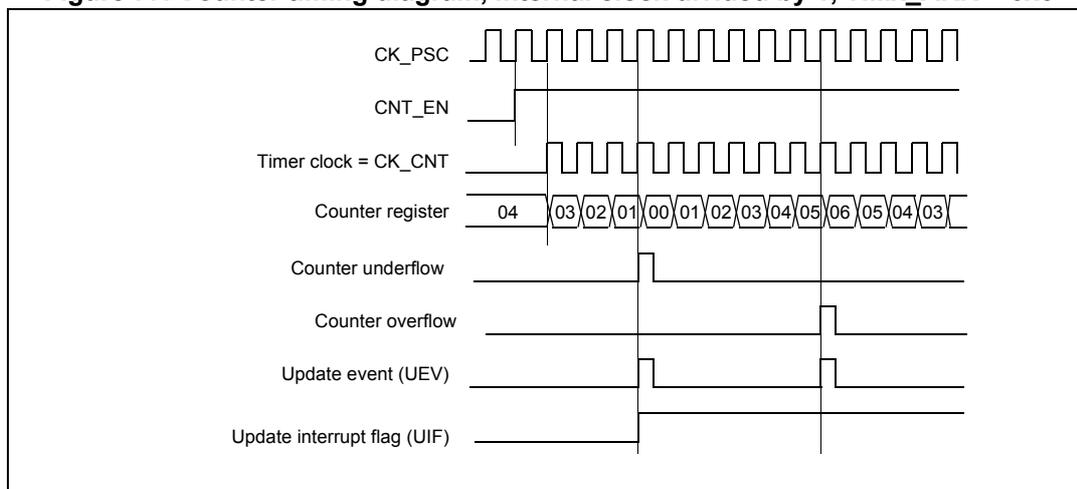
The timing diagram illustrates the operation of the TIM1 counter in center-aligned mode 1. The signals shown are:
- CK_PSC : Prescaler clock signal, shown as a continuous square wave.
- CNT_EN : Counter enable signal, which is high throughout the sequence.
- Timer clock = CK_CNT : The clock signal for the counter, identical to CK_PSC in this case (divided by 1).
- Counter register : Shows the sequence of counter values: 04, 03, 02, 01, 00, 01, 02, 03, 04, 05, 06, 05, 04, 03. The counter counts down to 00, then up to 06, then back down.
- Counter underflow : A single-cycle pulse generated when the counter reaches 00.
- Counter overflow : A single-cycle pulse generated when the counter reaches 06.
- Update event (UEV) : A pulse generated coinciding with both the underflow and overflow pulses.
- Update interrupt flag (UIF) : A signal that transitions high at the first update event (underflow) and remains high.
- 1. Here, center-aligned mode 1 is used (for more details refer to Section 17.4: TIM1 registers on page 375 ).
Figure 78. Counter timing diagram, internal clock divided by 2
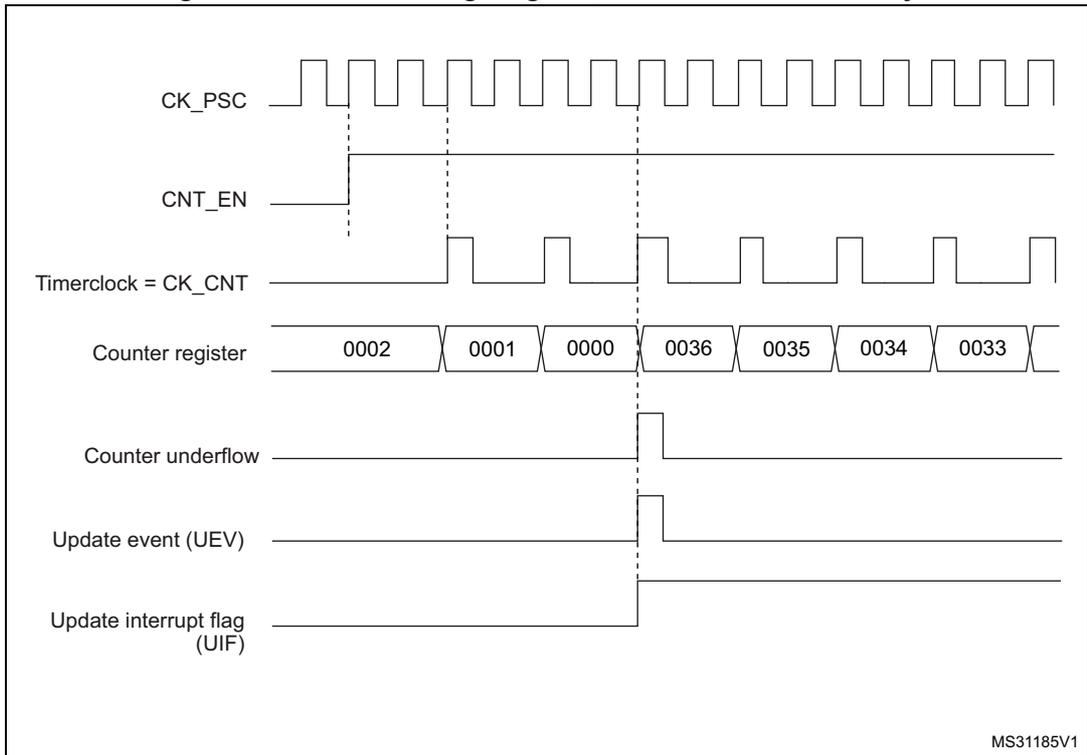
This timing diagram illustrates the operation of a timer with the internal clock divided by 2. The top signal, CK_PSC, is a periodic square wave. Below it, CNT_EN is a horizontal line indicating the counter is enabled. The Timerclock = CK_CNT signal is a square wave with a frequency half that of CK_PSC. The Counter register shows a sequence of values: 0002, 0001, 0000, 0036, 0035, 0034, and 0033. Vertical dashed lines mark specific clock edges. At the transition from 0000 to 0036, the Counter underflow signal pulses high. Simultaneously, the Update event (UEV) and Update interrupt flag (UIF) signals also pulse high. The diagram is labeled MS31185V1 in the bottom right corner.
Figure 79. Counter timing diagram, internal clock divided by 4, TIMx_ARR=0x36
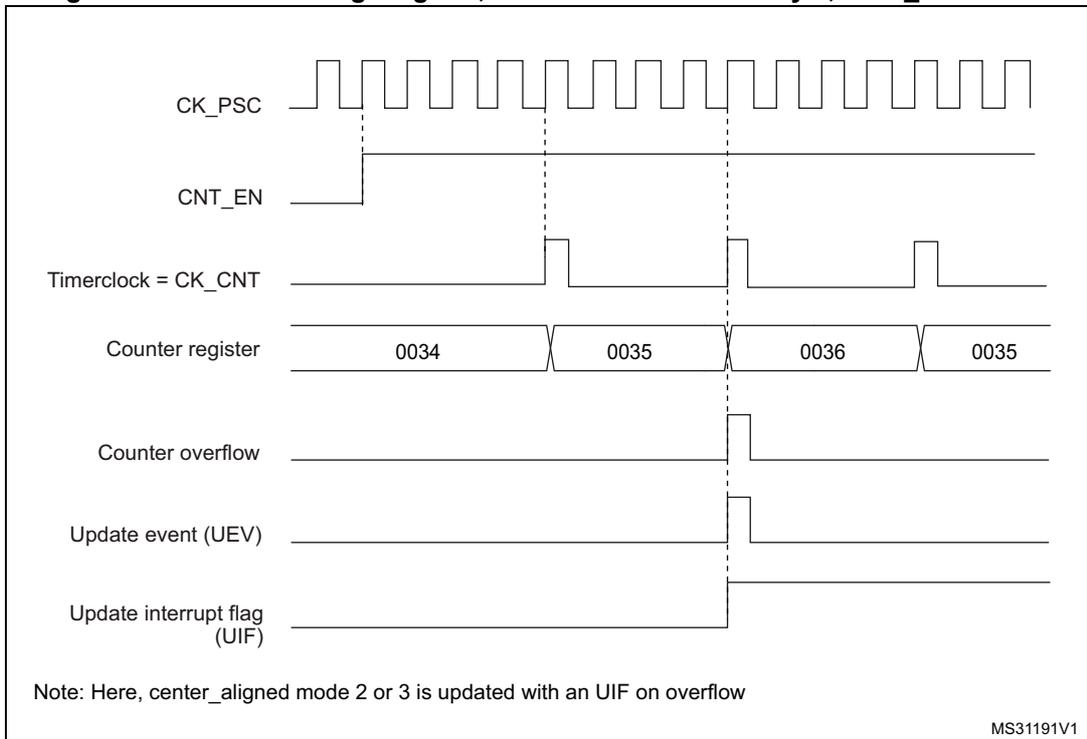
This timing diagram shows the timer operation with the internal clock divided by 4 and an auto-reload register value of 0x36. The CK_PSC signal is a square wave. CNT_EN is high, indicating the counter is enabled. The Timerclock = CK_CNT signal has a frequency one-quarter that of CK_PSC. The Counter register displays values 0034, 0035, 0036, and 0035. Vertical dashed lines indicate key clock edges. At the transition from 0036 to 0035, the Counter overflow signal pulses high. At this same moment, the Update event (UEV) and Update interrupt flag (UIF) signals pulse high. A note at the bottom left states: "Note: Here, center_aligned mode 2 or 3 is updated with an UIF on overflow". The diagram is labeled MS31191V1 in the bottom right corner.
- 1. Center-aligned mode 2 or 3 is used with an UIF on overflow.
Figure 80. Counter timing diagram, internal clock divided by N
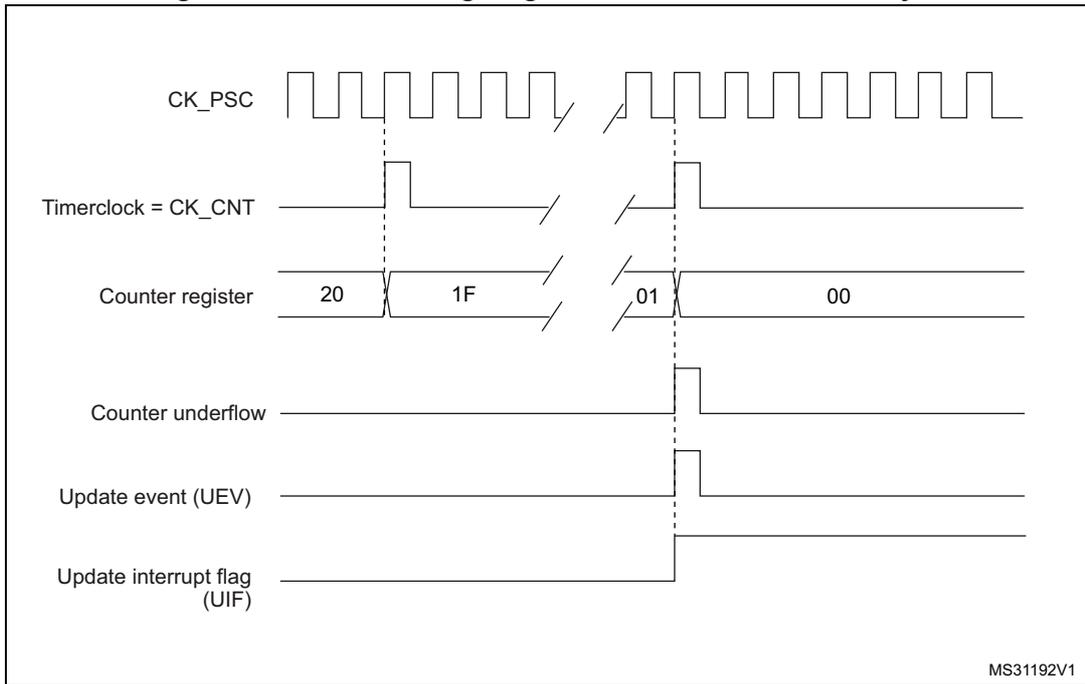
This timing diagram illustrates the operation of a counter with an internal clock divided by N. The top signal is CK_PSC, a periodic square wave. Below it, Timerclock = CK_CNT is shown as a series of pulses. The Counter register starts at 20, decrements to 1F, then after a break, starts at 01 and decrements to 00. The Counter underflow signal goes high when the counter reaches 00. The Update event (UEV) and Update interrupt flag (UIF) also go high at this point. The diagram is labeled MS31192V1 in the bottom right corner.
Figure 81. Counter timing diagram, update event with ARPE=1 (counter underflow)
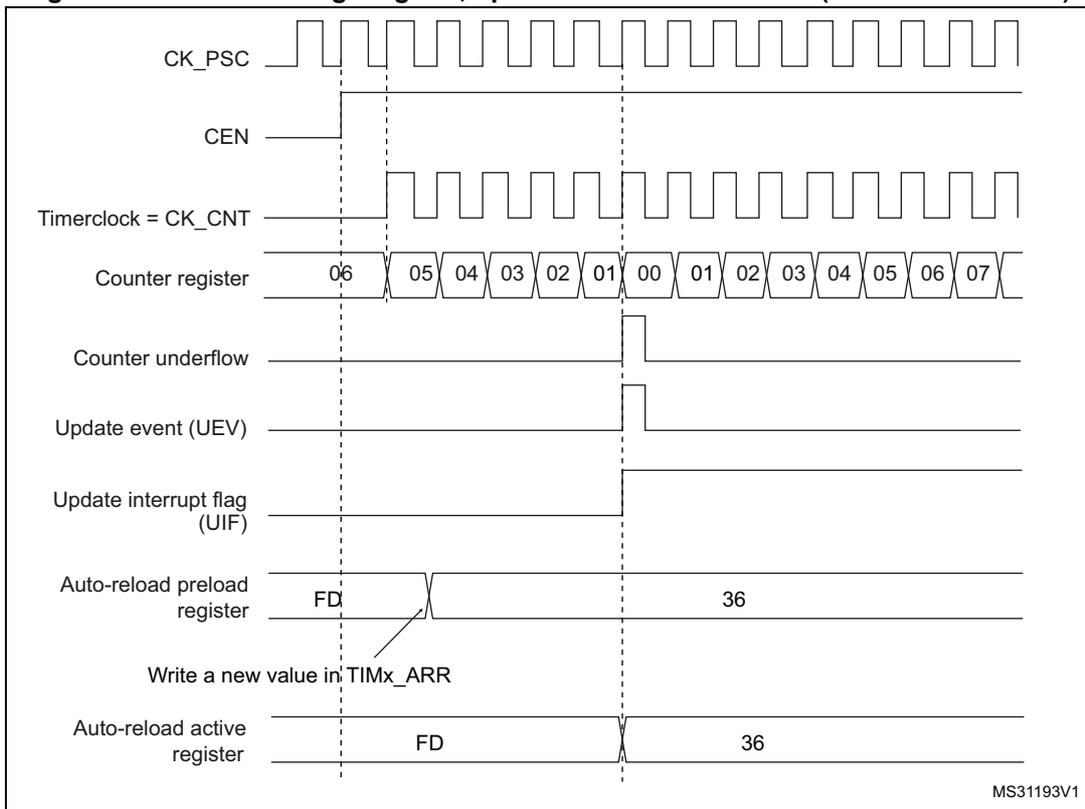
This timing diagram shows the counter operation with ARPE=1. It includes signals for CK_PSC, CEN (Counter Enable), Timerclock = CK_CNT, Counter register, Counter underflow, Update event (UEV), Update interrupt flag (UIF), Auto-reload preload register, a note about writing a new value to TIMx_ARR, and the Auto-reload active register. The counter counts down from 06 to 00, triggering an underflow and UEV. Simultaneously, the preload register value (FD) is copied to the active register. The counter then counts up from 01 to 07. The diagram is labeled MS31193V1 in the bottom right corner.
Figure 82. Counter timing diagram, Update event with ARPE=1 (counter overflow)
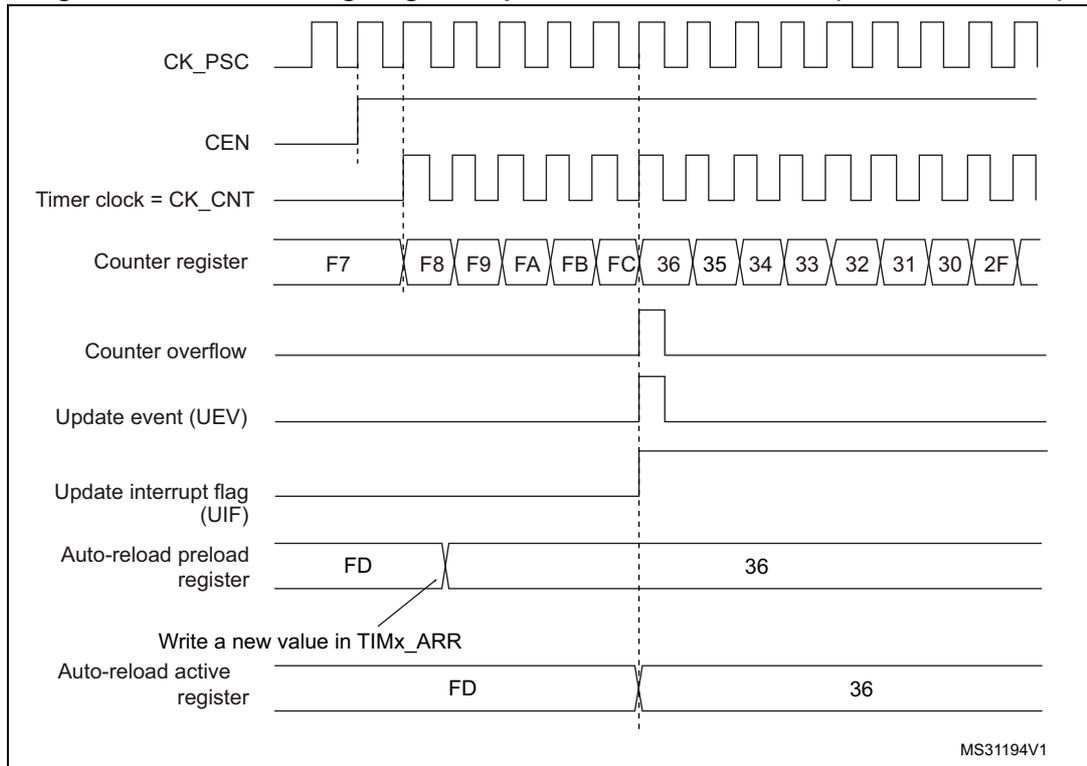
The diagram illustrates the timing of an update event (UEV) generated by a counter overflow in a timer. The top signal, CK_PSC, is a periodic clock. The CEN signal is a high-level enable. The Timer clock (CK_CNT) is derived from CK_PSC and is active when CEN is high. The Counter register shows values F7, F8, F9, FA, FB, FC, 36, 35, 34, 33, 32, 31, 30, 2F. The Counter overflow signal is high when the counter reaches FC. The Update event (UEV) is a pulse generated when the counter overflows from FC to 36. The Update interrupt flag (UIF) is set when the update event occurs. The Auto-reload preload register contains the value FD. The Auto-reload active register contains the value 36. A note indicates that a new value can be written in TIMx_ARR. The diagram is labeled MS31194V1.
17.3.3 Repetition counter
Section 17.3.1: Time-base unit describes how the update event (UEV) is generated with respect to the counter overflows/underflows. It is actually generated only when the repetition counter has reached zero. This can be useful when generating PWM signals.
This means that data are transferred from the preload registers to the shadow registers (TIMx_ARR auto-reload register, TIMx_PSC prescaler register, but also TIMx_CCRx capture/compare registers in compare mode) every N counter overflows or underflows, where N is the value in the TIMx_RCR repetition counter register.
The repetition counter is decremented:
- • At each counter overflow in upcounting mode,
- • At each counter underflow in downcounting mode,
- • At each counter overflow and at each counter underflow in center-aligned mode.
- Although this limits the maximum number of repetition to 128 PWM cycles, it makes it possible to update the duty cycle twice per PWM period. When refreshing compare registers only once per PWM period in center-aligned mode, maximum resolution is \( 2 \times T_{ck} \) , due to the symmetry of the pattern.
The repetition counter is an auto-reload type; the repetition rate is maintained as defined by the TIMx_RCR register value (refer to Figure 83 ). When the update event is generated by software (by setting the UG bit in TIMx_EGR register) or by hardware through the slave mode controller, it occurs immediately whatever the value of the repetition counter is and the repetition counter is reloaded with the content of the TIMx_RCR register.
In center-aligned mode, for odd values of RCR, the update event occurs either on the overflow or on the underflow depending on when the RCR register was written and when the counter was started. If the RCR was written before starting the counter, the UEV occurs on the overflow. If the RCR was written after starting the counter, the UEV occurs on the underflow. For example for RCR = 3, the UEV is generated on each 4th overflow or underflow event depending on when RCR was written.
Figure 83. Update rate examples depending on mode and TIMx_RCR register settings
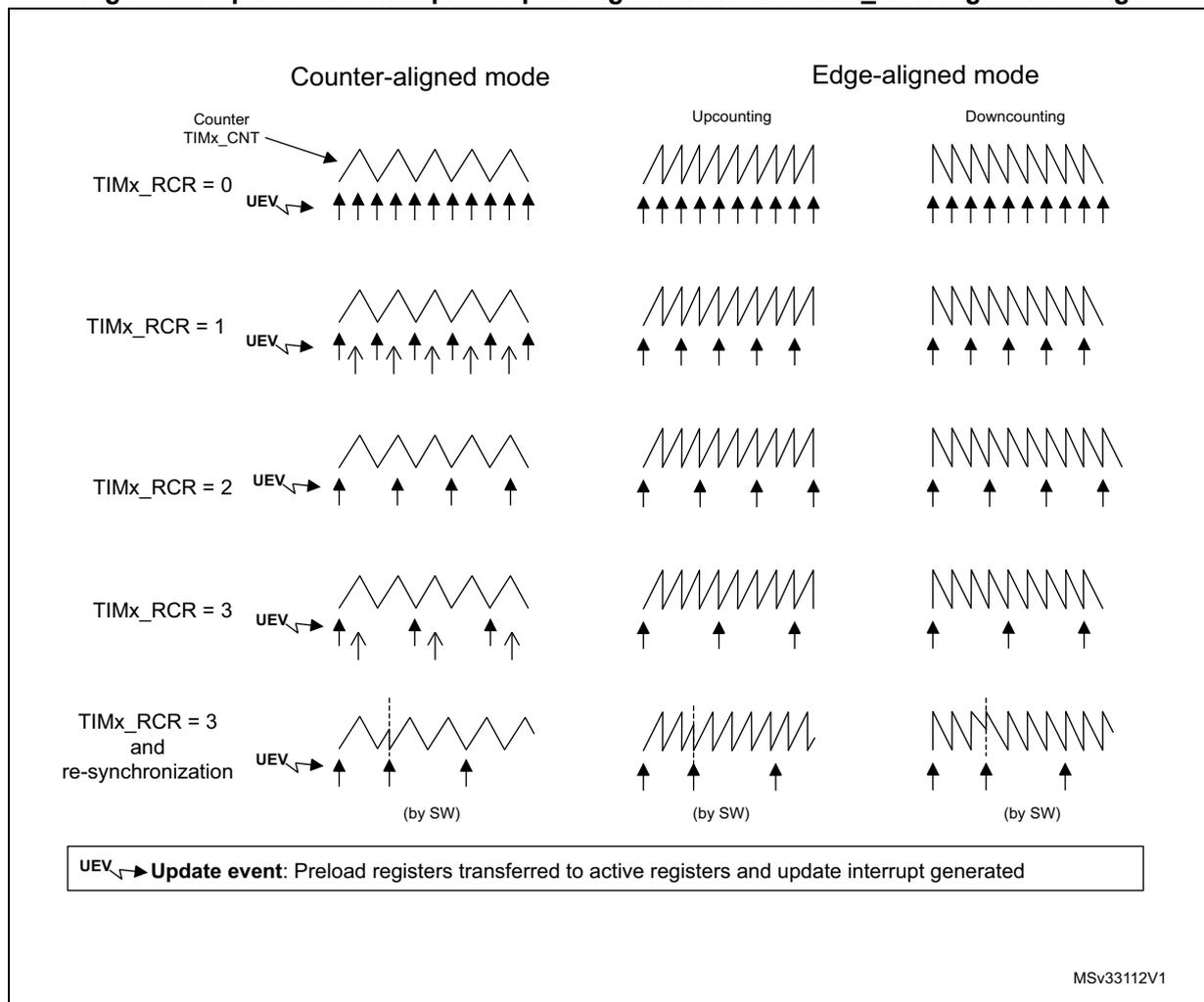
The figure displays timing diagrams for a counter (TIMx_CNT) across different modes and RCR settings. The modes are Center-aligned, Edge-aligned (Upcounting), and Edge-aligned (Downcounting). The RCR settings shown are 0, 1, 2, 3, and 3 (with re-synchronization). The Update Event (UEV) is indicated by upward arrows. In Center-aligned mode with RCR=3 and re-synchronization, the UEV occurs on underflows (labeled 'by SW').
| Mode | Sub-mode | TIMx_RCR | UEV Frequency / Event |
|---|---|---|---|
| Center-aligned | Center-aligned | 0 | Every overflow |
| 1 | Every 2nd overflow | ||
| 2 | Every 3rd overflow | ||
| 3 | Every 4th overflow | ||
| 3 (re-sync) | Every 4th underflow (by SW) | ||
| Edge-aligned | Upcounting | 0 | Every overflow |
| 1 | Every 2nd overflow | ||
| 2 | Every 3rd overflow | ||
| 3 | Every 4th overflow | ||
| 3 (re-sync) | Every 4th overflow (by SW) | ||
| Edge-aligned | Downcounting | 0 | Every underflow |
| 1 | Every 2nd underflow | ||
| 2 | Every 3rd underflow | ||
| 3 | Every 4th underflow | ||
| 3 (re-sync) | Every 4th underflow (by SW) |
UEV Update event: Preload registers transferred to active registers and update interrupt generated
MSV33112V1
17.3.4 Clock sources
The counter clock can be provided by the following clock sources:
- • Internal clock (CK_INT)
- • External clock mode1: external input pin
- • External clock mode2: external trigger input ETR
- • Internal trigger inputs (ITRx): using one timer as prescaler for another timer, for example, Timer 1 can be configured to act as a prescaler for Timer 2. Refer to Using one timer as prescaler for another on page 440 for more details.
Internal clock source (CK_INT)
If the slave mode controller is disabled (SMS=000), then the CEN, DIR (in the TIMx_CR1 register) and UG bits (in the TIMx_EGR register) are actual control bits and can be changed only by software (except UG which remains cleared automatically). As soon as the CEN bit is written to 1, the prescaler is clocked by the internal clock CK_INT.
Figure 84 shows the behavior of the control circuit and the upcounter in normal mode, without prescaler.
Figure 84. Control circuit in normal mode, internal clock divided by 1
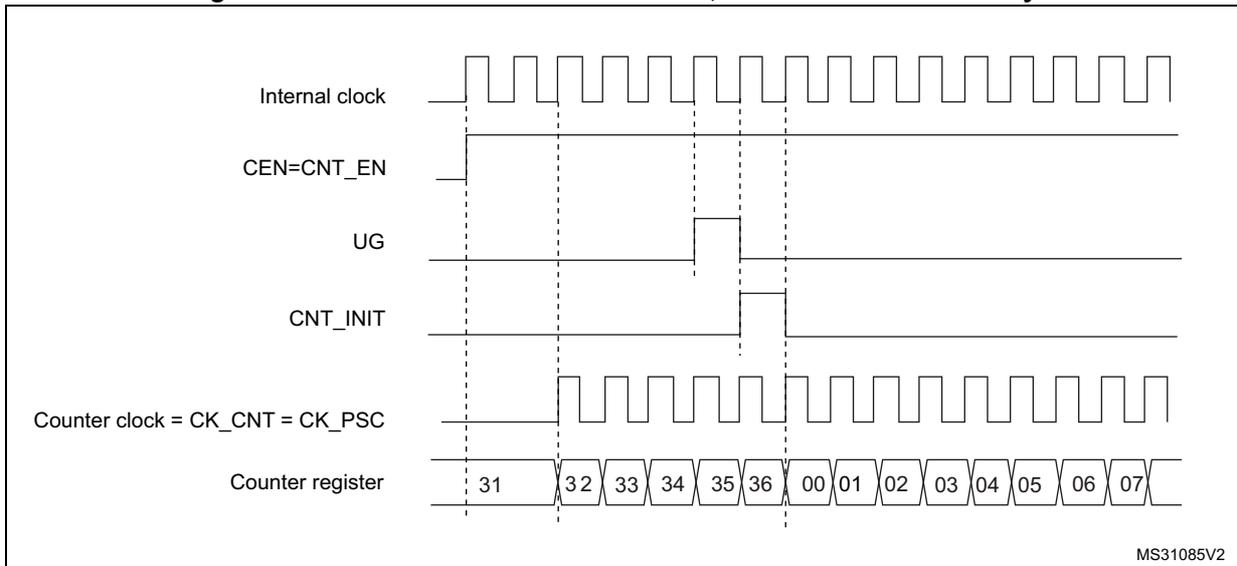
The timing diagram illustrates the operation of the timer control circuit and counter register. The 'Internal clock' is a continuous square wave. The 'CEN=CNT_EN' signal is initially low and transitions to high at the first vertical dashed line. The 'UG' signal is initially low and transitions to high at the second vertical dashed line. The 'CNT_INIT' signal is initially high and transitions to low at the third vertical dashed line. The 'Counter clock = CK_CNT = CK_PSC' signal is initially low and transitions to a square wave at the first vertical dashed line. The 'Counter register' values are shown in a sequence of boxes: 31, 32, 33, 34, 35, 36, 00, 01, 02, 03, 04, 05, 06, 07. The values 31 through 36 are shown before the first dashed line, and the values 00 through 07 are shown after the third dashed line. The label 'MS31085V2' is in the bottom right corner.
External clock source mode 1
This mode is selected when SMS=111 in the TIMx_SMCR register. The counter can count at each rising or falling edge on a selected input.
Figure 85. TI2 external clock connection example
![Figure 85. TI2 external clock connection example. This block diagram illustrates the internal logic for using the TI2 input as an external clock source. The TI2 pin is connected to a 'Filter' block, which is controlled by the ICF[3:0] bits in the TIMx_CCMR1 register. The output of the filter goes to an 'Edge detector' block. The edge detector produces two signals: 'TI2F_Rising' and 'TI2F_Falling'. These signals are inputs to a multiplexer (MUX) controlled by the CC2P bit in the TIMx_CCER register. The MUX output is connected to the TRGI input of an 'Encoder mode' block. The TRGI input also receives signals from ITRx, TI1_ED, TI1FP1, TI2FP2, and ETRF, selected by the TS[2:0] bits in the TIMx_SMCR register. The 'Encoder mode' block also receives 'External clock mode 1', 'External clock mode 2', and 'Internal clock mode' signals. The output of the 'Encoder mode' block is the CK_PSC signal. The 'Encoder mode' block is controlled by the ECE and SMS[2:0] bits in the TIMx_SMCR register.](/RM0091-STM32F0x1-0x2-0x8/1b7399a76746b03c7f4df48a20eaa72d_img.jpg)
For example, to configure the upcounter to count in response to a rising edge on the TI2 input, use the following procedure:
- 1. Configure channel 2 to detect rising edges on the TI2 input by writing CC2S = '01' in the TIMx_CCMR1 register.
- 2. Configure the input filter duration by writing the IC2F[3:0] bits in the TIMx_CCMR1 register (if no filter is needed, keep IC2F=0000).
- 3. Select rising edge polarity by writing CC2P=0 in the TIMx_CCER register.
- 4. Configure the timer in external clock mode 1 by writing SMS=111 in the TIMx_SMCR register.
- 5. Select TI2 as the trigger input source by writing TS=110 in the TIMx_SMCR register.
- 6. Enable the counter by writing CEN=1 in the TIMx_CR1 register.
Note: The capture prescaler is not used for triggering, so it does not need to be configured.
For code examples refer to the Appendix section A.9.1: Upcounter on TI2 rising edge code example .
When a rising edge occurs on TI2, the counter counts once and the TIF flag is set.
The delay between the rising edge on TI2 and the actual clock of the counter is due to the resynchronization circuit on TI2 input.
Figure 86. Control circuit in external clock mode 1
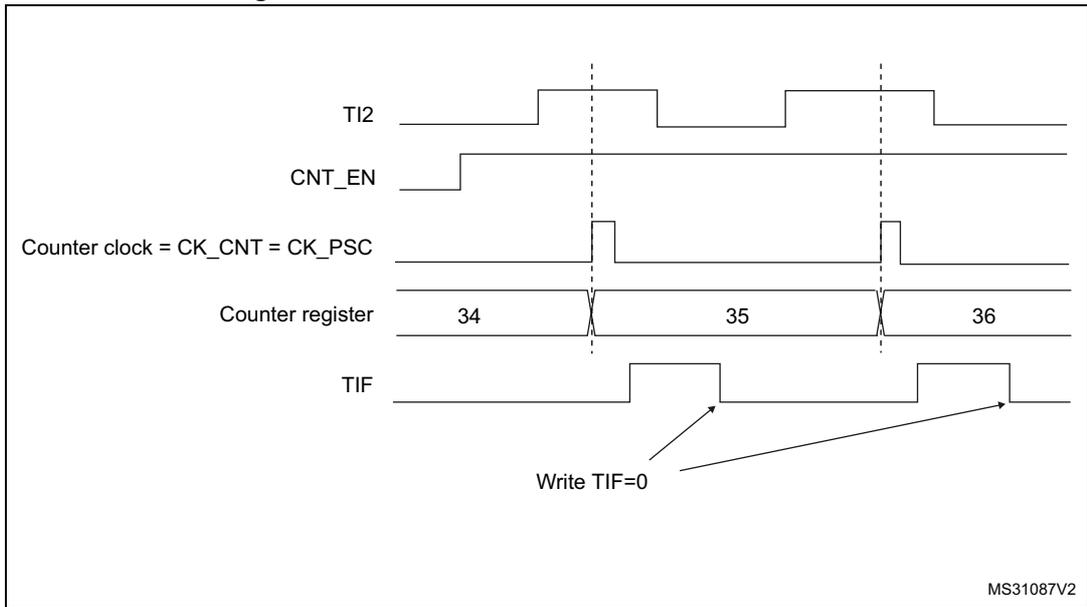
The diagram shows the relationship between several signals in external clock mode 1. The TI2 signal is a periodic square wave. The CNT_EN signal is a horizontal line indicating the counter is enabled. The Counter clock (CK_CNT = CK_PSC) is a square wave that toggles on the rising edges of TI2. The Counter register shows values 34, 35, and 36, with each value appearing at a rising edge of the counter clock. The TIF signal is a horizontal line that pulses high at each rising edge of the counter clock and then returns low when TIF=0 is written.
External clock source mode 2
This mode is selected by writing ECE=1 in the TIMx_SMCR register.
The counter can count at each rising or falling edge on the external trigger input ETR.
The Figure 87 gives an overview of the external trigger input block.
Figure 87. External trigger input block
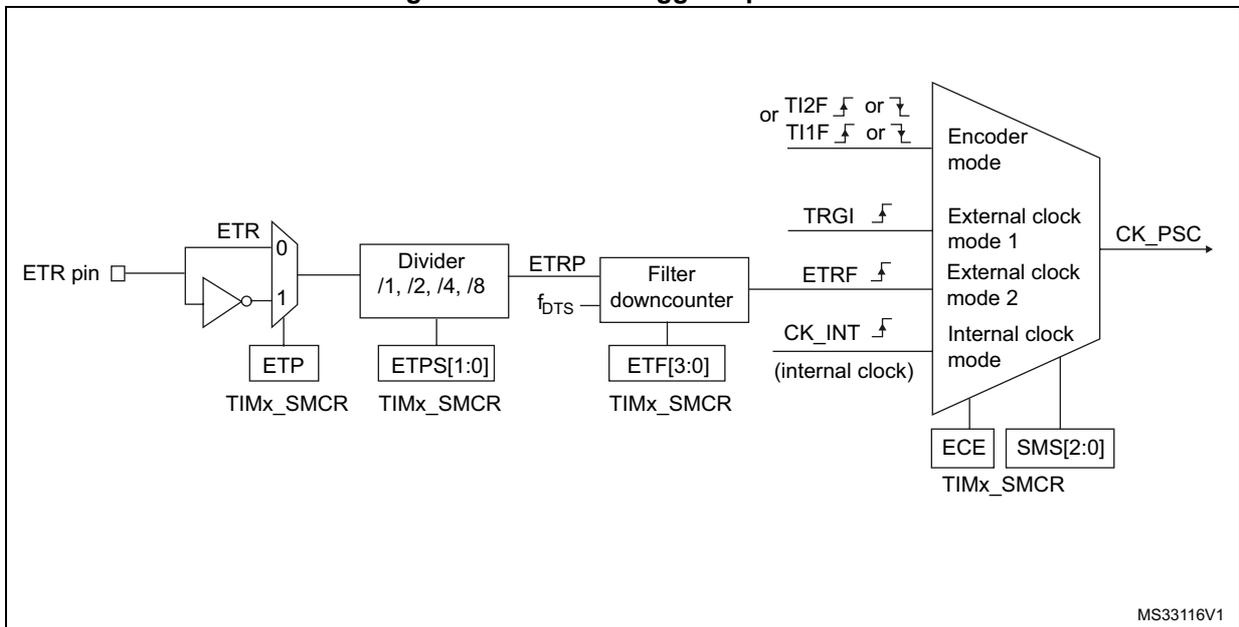
The diagram illustrates the external trigger input block. The ETR pin is connected to a multiplexer (ETR) that can pass the signal through an inverter or directly. The output of the multiplexer is the ETR signal, which is then divided by a divider (1/1, 1/2, 1/4, 1/8) controlled by ETPS[1:0] in the TIMx_SMCR register. The divided signal is ETRP, which is then filtered by a filter downcounter controlled by ETF[3:0] in the TIMx_SMCR register. The output of the filter is ETRF. The ETRF signal is then selected by a multiplexer for the clock source (CK_PSC). The multiplexer options include Encoder mode, External clock mode 1, External clock mode 2, and Internal clock mode. The selection is controlled by ECE and SMS[2:0] in the TIMx_SMCR register. The internal clock source is CK_INT.
For example, to configure the upcounter to count each 2 rising edges on ETR, use the following procedure:
- 1. As no filter is needed in this example, write ETF[3:0]=0000 in the TIMx_SMCR register.
- 2. Set the prescaler by writing ETPS[1:0]=01 in the TIMx_SMCR register
- 3. Select rising edge detection on the ETR pin by writing ETP=0 in the TIMx_SMCR register
- 4. Enable external clock mode 2 by writing ECE=1 in the TIMx_SMCR register.
- 5. Enable the counter by writing CEN=1 in the TIMx_CR1 register.
The counter counts once each 2 ETR rising edges.
For code example refer to the Appendix section A.9.2: Up counter on each 2 ETR rising edges code example .
The delay between the rising edge on ETR and the actual clock of the counter is due to the resynchronization circuit on the ETRP signal.
Figure 88. Control circuit in external clock mode 2
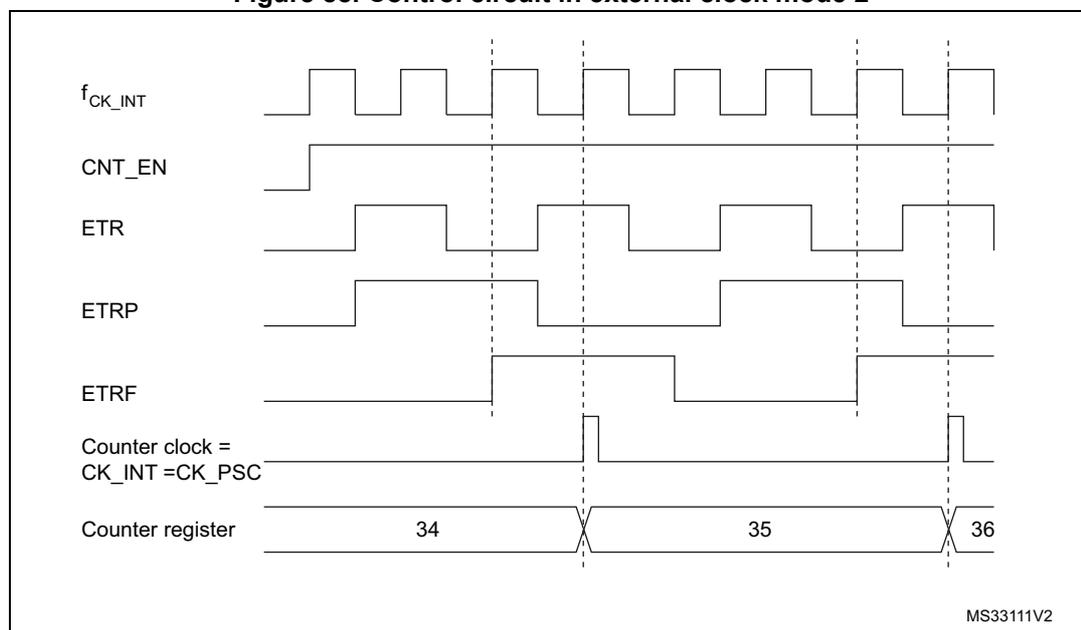
The timing diagram illustrates the relationship between several signals in external clock mode 2. The signals shown are:
- f CK_INT : Internal clock signal, a periodic square wave.
- CNT_EN : Counter enable signal, which is high when the counter is active.
- ETR : External trigger signal, a periodic square wave.
- ETRP : Resynchronized ETR signal, which follows ETR but is synchronized to the internal clock.
- ETRF : Filtered ETR signal, which is a filtered version of the ETR signal.
- Counter clock = CK INT = CK PSC : The clock signal for the counter, derived from the internal clock and prescaler.
- Counter register : The current value of the counter register, shown as 34, 35, and 36.
The counter increments on every second rising edge of the ETR signal. The counter register values are shown as 34, 35, and 36, with increments occurring at specific ETR rising edges. The diagram also shows the delay between the rising edge on ETR and the actual clock of the counter due to the resynchronization circuit on the ETRP signal.
MS33111V2
17.3.5 Capture/compare channels
Each Capture/Compare channel is built around a capture/compare register (including a shadow register), a input stage for capture (with digital filter, multiplexing and prescaler) and an output stage (with comparator and output control).
Figure 89 to Figure 92 give an overview of one Capture/Compare channel.
The input stage samples the corresponding TIx input to generate a filtered signal TIxF. Then, an edge detector with polarity selection generates a signal (TIxFPx) which can be used as trigger input by the slave mode controller or as the capture command. It is prescaled before the capture register (ICxPS).
Figure 89. Capture/compare channel (example: channel 1 input stage)
![Figure 89: Capture/compare channel (example: channel 1 input stage) block diagram. The diagram shows the input stage for channel 1. TI1 is filtered by a 'Filter downcounter' with f_DTS to produce TI1F. TI1F is then processed by an 'Edge detector' to produce TI1F_Rising and TI1F_Falling signals. These signals are multiplexed by a 2-to-1 MUX (inputs 0 and 1) controlled by CC1P/CC1NP to produce TI1FP1. TI1FP1 is ANDed with TI1F_ED to produce an output 'To the slave mode controller'. TI1FP1 is also multiplexed by a 4-to-1 MUX (inputs 01, 10, 11) controlled by CC1S[1:0] and ICPS[1:0] to produce IC1. IC1 is divided by a 'Divider /1, /2, /4, /8' to produce IC1PS. The MUX for IC1 also takes TRC (from slave mode controller) and TI2F signals (from channel 2) as inputs. Control registers ICF[3:0], TIMx_CCMR1, TIMx_CCER, and CC1E are shown.](/RM0091-STM32F0x1-0x2-0x8/470b612d7c5c8f18f60ddf220b78e272_img.jpg)
The output stage generates an intermediate waveform which is then used for reference: OCxRef (active high). The polarity acts at the end of the chain.
Figure 90. Capture/compare channel 1 main circuit
![Figure 90: Capture/compare channel 1 main circuit block diagram. This diagram shows the main circuit for channel 1. It includes an 'APB Bus' connected to an 'MCU-peripheral interface'. The interface connects to a 'Capture/compare preload register' and a 'Capture/compare shadow register'. The preload register is loaded from the bus via 'write CCR1H' and 'write CCR1L' signals. The shadow register is loaded from the preload register via 'capture_transfer' and 'compare_transfer' signals. The shadow register output is connected to a 'Counter' and a 'Comparator'. The Comparator outputs 'CNT>CCR1' and 'CNT=CCR1' to a 'time base unit'. The Counter output is also connected to the shadow register. The 'Input mode' is determined by CC1S[1] and CC1S[0]. The 'Capture' signal is generated by an AND gate of Input mode, IC1PS, CC1E, and CC1G. The 'Output mode' is determined by CC1S[1] and CC1S[0]. The 'OC1PE' signal is generated by an OR gate of Output mode and UEV (from time base unit). Control signals Read CCR1H, Read CCR1L, read_in_progress, write_in_progress, and TIM1_EGR are also shown.](/RM0091-STM32F0x1-0x2-0x8/3f568b2b97cbffcb4ef378cd6c14b4fe_img.jpg)
Figure 91. Output stage of capture/compare channel (channel 1 to 3)
![Schematic diagram of the output stage for capture/compare channels 1 to 3. It shows the signal flow from the Output mode controller (driven by CNT>CCR1 and CNT=CCR1) through a Dead-time generator (driven by DTG[7:0]) to two multiplexers. These multiplexers select between '0', OC1_DT, and OC1N_DT based on CC1P, CC1NE, and CC1E settings. The selected signals pass through inverters and are then enabled by an Output enable circuit (driven by MOE, OSSI, OSSR, and TIM1_BDTR) to produce OC1 and OC1N outputs. Control registers shown include TIMx_SMCR (OCCS), OCREF_CLR, ETRF, TIM1_CCMR1 (OC1CE, OC1M[2:0]), TIM1_BDTR (DTG[7:0]), and TIM1_CCER (CC1NE, CC1E, CC1P, CC1NP).](/RM0091-STM32F0x1-0x2-0x8/eb0a32fe7e14aabef13cb5416774c4a2_img.jpg)
Figure 92. Output stage of capture/compare channel (channel 4)
![Schematic diagram of the output stage for capture/compare channel 4. The Output mode controller (driven by CNT>CCR4 and CNT=CCR4) generates OC4REF, which is fed back to the master mode controller and also passes through a multiplexer. This multiplexer selects between '0' and OC4REF based on CC5E and CC4P settings. The signal then passes through an inverter and an Output enable circuit (driven by MOE, OSSI, TIM1_BDTR, and OIS4) to produce the OC4 output. Control registers shown include TIMx_SMCR (OCCS), OCREF_CLR, ETRF, TIM1_CCMR2 (OC2M[2:0]), and TIM1_CCER (CC5E, CC4P, CC4E).](/RM0091-STM32F0x1-0x2-0x8/f72f610dea3304378b6430626fe132fd_img.jpg)
The capture/compare block is made of one preload register and one shadow register. Write and read always access the preload register.
In capture mode, captures are actually done in the shadow register, which is copied into the preload register.
In compare mode, the content of the preload register is copied into the shadow register which is compared to the counter.
17.3.6 Input capture mode
In Input capture mode, the Capture/Compare Registers (TIMx_CCRx) are used to latch the value of the counter after a transition detected by the corresponding ICx signal. When a capture occurs, the corresponding CCxIF flag (TIMx_SR register) is set and an interrupt or a DMA request can be sent if they are enabled. If a capture occurs while the CCxIF flag was already high, then the over-capture flag CCxOF (TIMx_SR register) is set. CCxIF can be cleared by software by writing it to '0' or by reading the captured data stored in the TIMx_CCRx register. CCxOF is cleared when it is written with 0.
The following example shows how to capture the counter value in TIMx_CCR1 when TI1 input rises. To do this, use the following procedure:
- • Select the active input: TIMx_CCR1 must be linked to the TI1 input, so write the CC1S bits to 01 in the TIMx_CCMR1 register. As soon as CC1S becomes different from 00, the channel is configured in input and the TIMx_CCR1 register becomes read-only.
- • Program the appropriate input filter duration in relation with the signal connected to the timer (when the input is one of the TIx (ICxF bits in the TIMx_CCMRx register). Let's imagine that, when toggling, the input signal is not stable during at most 5 internal clock cycles. We must program a filter duration longer than these 5 clock cycles. We can validate a transition on TI1 when 8 consecutive samples with the new level have been detected (sampled at \( f_{DTS} \) frequency). Then write IC1F bits to 0011 in the TIMx_CCMR1 register.
- • Select the edge of the active transition on the TI1 channel by writing CC1P and CC1NP bits to 0 in the TIMx_CCER register (rising edge in this case).
- • Program the input prescaler. In our example, we wish the capture to be performed at each valid transition, so the prescaler is disabled (write IC1PS bits to '00' in the TIMx_CCMR1 register).
- • Enable capture from the counter into the capture register by setting the CC1E bit in the TIMx_CCER register.
- • If needed, enable the related interrupt request by setting the CC1IE bit in the TIMx_DIER register, and/or the DMA request by setting the CC1DE bit in the TIMx_DIER register.
For code example refer to the Appendix section A.9.3: Input capture configuration code example .
When an input capture occurs:
- • The TIMx_CCR1 register gets the value of the counter on the active transition.
- • CC1IF flag is set (interrupt flag). CC1OF is also set if at least two consecutive captures occurred whereas the flag was not cleared.
- • An interrupt is generated depending on the CC1IE bit.
- • A DMA request is generated depending on the CC1DE bit.
For code example refer to the Appendix section A.9.4: Input capture data management code example .
In order to handle the overcapture, it is recommended to read the data before the overcapture flag. This is to avoid missing an overcapture which could happen after reading the flag and before reading the data.
Note: IC interrupt and/or DMA requests can be generated by software by setting the corresponding CCxG bit in the TIMx_EGR register.
17.3.7 PWM input mode
This mode is a particular case of input capture mode. The procedure is the same except:
- • Two ICx signals are mapped on the same TIx input.
- • These 2 ICx signals are active on edges with opposite polarity.
- • One of the two TIxFP signals is selected as trigger input and the slave mode controller is configured in reset mode.
For example, one can measure the period (in TIMx_CCR1 register) and the duty cycle (in TIMx_CCR2 register) of the PWM applied on TI1 using the following procedure (depending on CK_INT frequency and prescaler value):
- • Select the active input for TIMx_CCR1: write the CC1S bits to 01 in the TIMx_CCMR1 register (TI1 selected).
- • Select the active polarity for TI1FP1 (used both for capture in TIMx_CCR1 and counter clear): write the CC1P and CC1NP bits to '0' (active on rising edge).
- • Select the active input for TIMx_CCR2: write the CC2S bits to 10 in the TIMx_CCMR1 register (TI1 selected).
- • Select the active polarity for TI1FP2 (used for capture in TIMx_CCR2): write the CC2P bit to '1' and the CC2NP bit to '0' (active on falling edge).
- • Select the valid trigger input: write the TS bits to 101 in the TIMx_SMCR register (TI1FP1 selected).
- • Configure the slave mode controller in reset mode: write the SMS bits to 100 in the TIMx_SMCR register.
- • Enable the captures: write the CC1E and CC2E bits to '1' in the TIMx_CCER register.
For code example refer to the Appendix section A.9.5: PWM input configuration code example .
Figure 93. PWM input mode timing
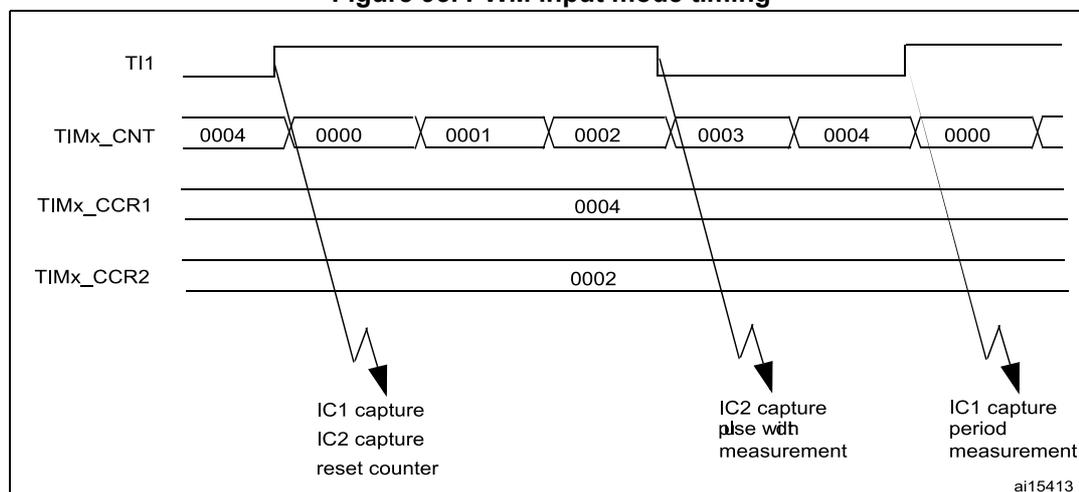
The timing diagram shows four horizontal lines representing signals over time:
- TI1: A PWM signal that is high for a certain duration and then low.
- TIMx_CNT: A counter that increments from 0000 to 0004 while TI1 is high, then resets to 0000 when TI1 falls. It increments again from 0000 to 0004 while TI1 is low, then resets to 0000 when TI1 rises again.
- TIMx_CCR1: A register that captures the counter value at the rising edge of TI1, shown as 0004.
- TIMx_CCR2: A register that captures the counter value at the falling edge of TI1, shown as 0002.
Annotations with arrows pointing to specific events:
- At the first rising edge of TI1: "IC1 capture", "IC2 capture", "reset counter".
- At the falling edge of TI1: "IC2 capture pulse width measurement".
- At the second rising edge of TI1: "IC1 capture period measurement".
The identifier ai15413 is present in the bottom right corner of the diagram.
17.3.8 Forced output mode
In output mode (CCxS bits = 00 in the TIMx_CCMRx register), each output compare signal (OCxREF and then OCx/OCxN) can be forced to active or inactive level directly by software, independently of any comparison between the output compare register and the counter.
To force an output compare signal (OCxREF/OCx) to its active level, one just needs to write 101 in the OCxM bits in the corresponding TIMx_CCMRx register. Thus OCxREF is forced high (OCxREF is always active high) and OCx get opposite value to CCxP polarity bit.
For example: CCxP=0 (OCx active high) => OCx is forced to high level.
The OCxREF signal can be forced low by writing the OCxM bits to 100 in the TIMx_CCMRx register.
Anyway, the comparison between the TIMx_CCRx shadow register and the counter is still performed and allows the flag to be set. Interrupt and DMA requests can be sent accordingly. This is described in the output compare mode section below.
17.3.9 Output compare mode
This function is used to control an output waveform or indicating when a period of time has elapsed.
When a match is found between the capture/compare register and the counter, the output compare function:
- • Assigns the corresponding output pin to a programmable value defined by the output compare mode (OCxM bits in the TIMx_CCMRx register) and the output polarity (CCxP bit in the TIMx_CCER register). The output pin can keep its level (OCxM=000), be set active (OCxM=001), be set inactive (OCxM=010) or can toggle (OCxM=011) on match.
- • Sets a flag in the interrupt status register (CCxIF bit in the TIMx_SR register).
- • Generates an interrupt if the corresponding interrupt mask is set (CCxIE bit in the TIMx_DIER register).
- • Sends a DMA request if the corresponding enable bit is set (CCxDE bit in the TIMx_DIER register, CCDS bit in the TIMx_CR2 register for the DMA request selection).
The TIMx_CCRx registers can be programmed with or without preload registers using the OCxPE bit in the TIMx_CCMRx register.
In output compare mode, the update event UEV has no effect on OCxREF and OCx output. The timing resolution is one count of the counter. Output compare mode can also be used to output a single pulse (in One Pulse mode).
Procedure:
- 1. Select the counter clock (internal, external, prescaler).
- 2. Write the desired data in the TIMx_ARR and TIMx_CCRx registers.
- 3. Set the CCxIE bit if an interrupt request is to be generated.
- 4. Select the output mode. For example:
- – Write OCxM = 011 to toggle OCx output pin when CNT matches CCRx
- – Write OCxPE = 0 to disable preload register
- – Write CCxP = 0 to select active high polarity
- – Write CCxE = 1 to enable the output
- 5. Enable the counter by setting the CEN bit in the TIMx_CR1 register.
For code example refer to the Appendix section A.9.7: Output compare configuration code example .
The TIMx_CCRx register can be updated at any time by software to control the output waveform, provided that the preload register is not enabled (OCxPE='0', else TIMx_CCRx shadow register is updated only at the next update event UEV). An example is given in Figure 94 .
Figure 94. Output compare mode, toggle on OC1
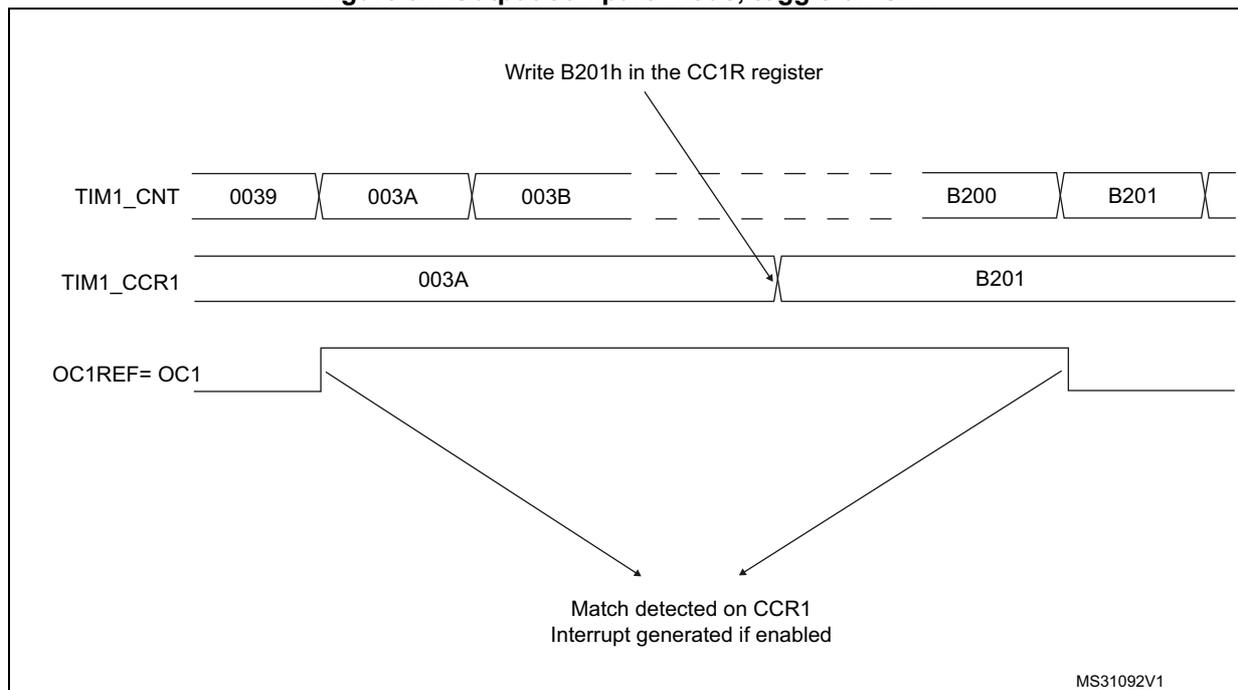
Write B201h in the CC1R register
TIM1_CNT: 0039 | 003A | 003B | - - - - - | B200 | B201
TIM1_CCR1: 003A | B201
OC1REF= OC1: [High] --- [Low] --- [High]
Match detected on CCR1
Interrupt generated if enabled
MS31092V1
17.3.10 PWM mode
Pulse Width Modulation mode allows to generate a signal with a frequency determined by the value of the TIMx_ARR register and a duty cycle determined by the value of the TIMx_CCRx register.
The PWM mode can be selected independently on each channel (one PWM per OCx output) by writing '110' (PWM mode 1) or '111' (PWM mode 2) in the OCxM bits in the TIMx_CCMRx register. The corresponding preload register must be enabled by setting the
OCxPE bit in the TIMx_CCMRx register, and eventually the auto-reload preload register (in upcounting or center-aligned modes) by setting the ARPE bit in the TIMx_CR1 register.
As the preload registers are transferred to the shadow registers only when an update event occurs, before starting the counter, all registers must be initialized by setting the UG bit in the TIMx_EGR register.
OCx polarity is software programmable using the CCxP bit in the TIMx_CCER register. It can be programmed as active high or active low. OCx output is enabled by a combination of the CCxE, CCxNE, MOE, OSSI and OSSR bits (TIMx_CCER and TIMx_BDTR registers). Refer to the TIMx_CCER register description for more details.
In PWM mode (1 or 2), TIMx_CNT and TIMx_CCRx are always compared to determine whether \( TIMx\_CCRx \leq TIMx\_CNT \) or \( TIMx\_CNT \leq TIMx\_CCRx \) (depending on the direction of the counter).
The timer is able to generate PWM in edge-aligned mode or center-aligned mode depending on the CMS bits in the TIMx_CR1 register.
PWM edge-aligned mode
- • Upcounting configuration
Upcounting is active when the DIR bit in the TIMx_CR1 register is low. Refer to the Upcounting mode on page 332 .
In the following example, we consider PWM mode 1. The reference PWM signal OCxREF is high as long as \( TIMx\_CNT < TIMx\_CCRx \) else it becomes low. If the compare value in TIMx_CCRx is greater than the auto-reload value (in TIMx_ARR) then OCxREF is held at '1'. If the compare value is 0 then OCxRef is held at '0'.
Figure 95 shows some edge-aligned PWM waveforms in an example where \( TIMx\_ARR=8 \) .
Figure 95. Edge-aligned PWM waveforms (ARR=8)
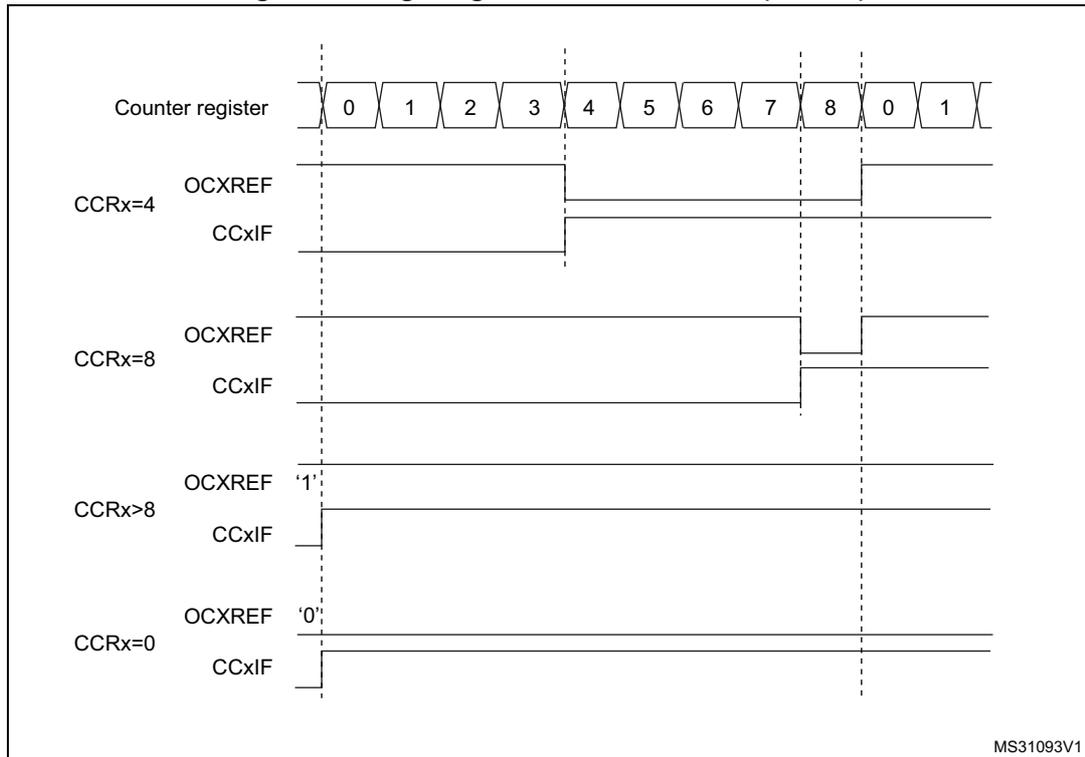
The figure illustrates the relationship between the counter register values and the resulting PWM waveforms for different compare register (CCR) settings. The counter register (TIMx_CNT) is shown with values 0, 1, 2, 3, 4, 5, 6, 7, 8, 0, 1. Vertical dashed lines mark the counter values 0, 4, 8, and 0 again. The OCXREF signal is shown for four cases: CCRx=4, where the signal is high from 0 to 4 and low from 4 to 8; CCRx=8, where the signal is high from 0 to 8 and low from 8 to 0; CCRx>8, where the signal is held at a constant high level ('1'); and CCRx=0, where the signal is held at a constant low level ('0'). The CCxIF flag is shown for each case, indicating the interrupt generation point at the end of the high or low pulse.
MS31093V1
For code example refer to the Appendix section A.9.8: Edge-aligned PWM configuration example .
- • Downcounting configuration
Downcounting is active when DIR bit in TIMx_CR1 register is high. Refer to the Downcounting mode on page 336
In PWM mode 1, the reference signal OCxRef is low as long as \( TIMx\_CNT > TIMx\_CCRx \) else it becomes high. If the compare value in TIMx_CCRx is greater than the auto-reload value in TIMx_ARR, then OCxREF is held at '1'. 0% PWM is not possible in this mode.
PWM center-aligned mode
Center-aligned mode is active when the CMS bits in TIMx_CR1 register are different from '00' (all the remaining configurations having the same effect on the OCxRef/OCx signals). The compare flag is set when the counter counts up, when it counts down or both when it counts up and down depending on the CMS bits configuration. The direction bit (DIR) in the TIMx_CR1 register is updated by hardware and must not be changed by software. Refer to the Center-aligned mode (up/down counting) on page 338 .
Figure 96 shows some center-aligned PWM waveforms in an example where:
- • TIMx_ARR=8,
- • PWM mode is the PWM mode 1,
- • The flag is set when the counter counts down corresponding to the center-aligned mode 1 selected for CMS=01 in TIMx_CR1 register.
For code example refer to the Appendix section A.9.9: Center-aligned PWM configuration example .
Figure 96. Center-aligned PWM waveforms (ARR=8)
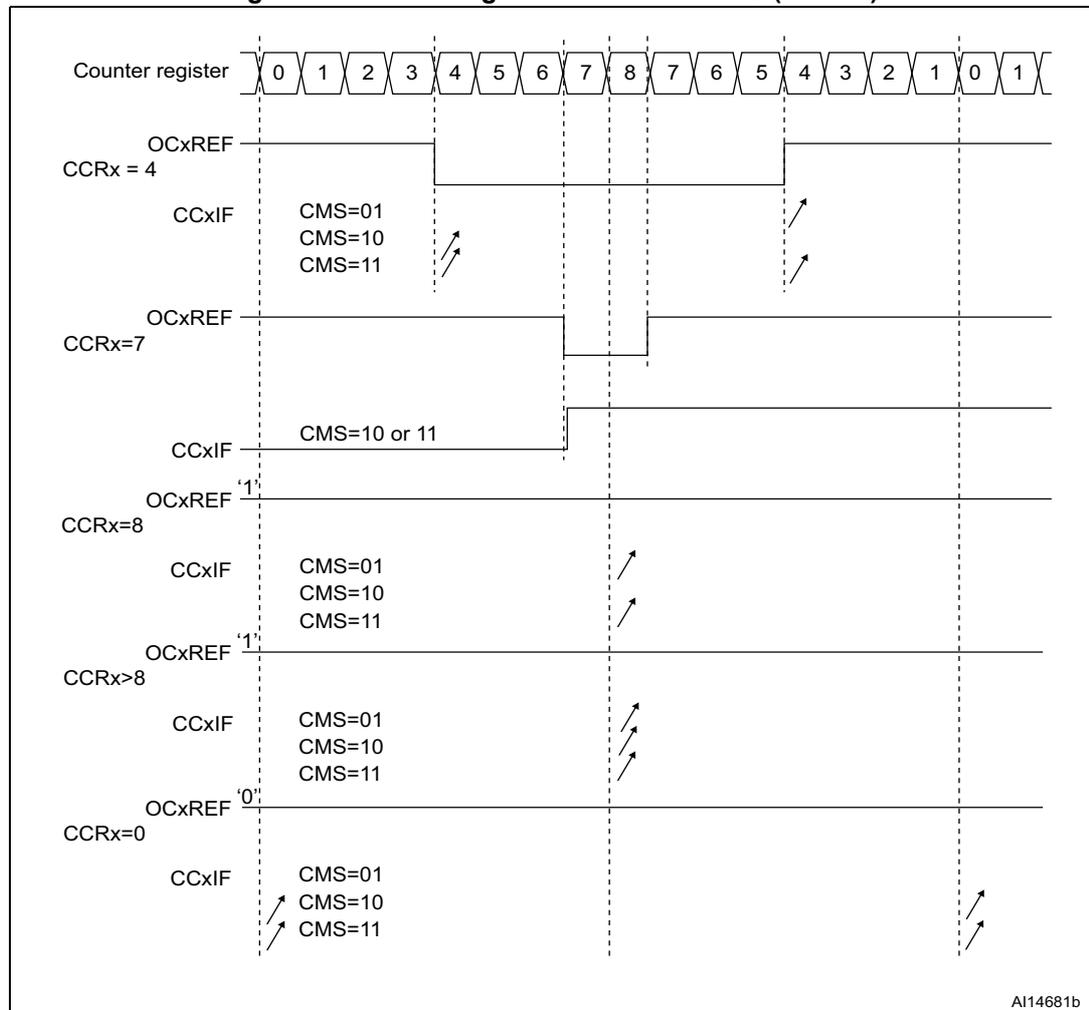
The figure illustrates the relationship between the counter register values and the resulting PWM signals for various compare register (CCR) settings in center-aligned mode. The counter register sequence is: 0, 1, 2, 3, 4, 5, 6, 7, 8, 7, 6, 5, 4, 3, 2, 1, 0, 1. Vertical dashed lines mark the counter values 0, 4, 7, 8, and 1.
- CCR x = 4: The OC x REF signal is high from counter 0 to 4 and low from 4 to 8. The CC x IF flag is set at counter 4 (indicated by an upward arrow for CMS=01, 10, 11).
- CCR x = 7: The OC x REF signal is high from 0 to 7 and low from 7 to 8. The CC x IF flag is set at counter 7 (indicated by an upward arrow for CMS=10 or 11).
- CCR x = 8: The OC x REF signal is high from 0 to 8 and low from 8 to 0. The CC x IF flag is set at counter 8 (indicated by upward arrows for CMS=01, 10, 11).
- CCR x > 8: The OC x REF signal is always high. The CC x IF flag is set at counter 8 (indicated by upward arrows for CMS=01, 10, 11).
- CCR x = 0: The OC x REF signal is always low. The CC x IF flag is set at counter 0 (indicated by downward arrows for CMS=01, 10, 11).
AI14681b
Hints on using center-aligned mode:
- • When starting in center-aligned mode, the current up-down configuration is used. It means that the counter counts up or down depending on the value written in the DIR bit in the TIMx_CR1 register. Moreover, the DIR and CMS bits must not be changed at the same time by the software.
- • Writing to the counter while running in center-aligned mode is not recommended as it can lead to unexpected results. In particular:
- – The direction is not updated if a value greater than the auto-reload value is written in the counter (TIMx_CNT > TIMx_ARR). For example, if the counter was counting up, it continues to count up.
- – The direction is updated if 0 or the TIMx_ARR value is written in the counter but no Update Event UEV is generated.
- • The safest way to use center-aligned mode is to generate an update by software (setting the UG bit in the TIMx_EGR register) just before starting the counter and not to write the counter while it is running.
17.3.11 Complementary outputs and dead-time insertion
The advanced-control timers (TIM1) can output two complementary signals and manage the switching-off and the switching-on instants of the outputs.
This time is generally known as dead-time and it has to be adjusted depending on the devices that are connected to the outputs and their characteristics (intrinsic delays of level-shifters, delays due to power switches...)
The polarity of the outputs (main output OCx or complementary OCxN) can be selected independently for each output. This is done by writing to the CCxP and CCxNP bits in the TIMx_CCER register.
The complementary signals OCx and OCxN are activated by a combination of several control bits: the CCxE and CCxNE bits in the TIMx_CCER register and the MOE, OISx, OISxN, OSSI and OSSR bits in the TIMx_BDTR and TIMx_CR2 registers. Refer to Table 63: Output control bits for complementary OCx and OCxN channels with break feature on page 393 for more details. In particular, the dead-time is activated when switching to the IDLE state (MOE falling down to 0).
Dead-time insertion is enabled by setting both CCxE and CCxNE bits, and the MOE bit if the break circuit is present. There is one 10-bit dead-time generator for each channel. From a reference waveform OCxREF, it generates 2 outputs OCx and OCxN. If OCx and OCxN are active high:
- • The OCx output signal is the same as the reference signal except for the rising edge, which is delayed relative to the reference rising edge.
- • The OCxN output signal is the opposite of the reference signal except for the rising edge, which is delayed relative to the reference falling edge.
If the delay is greater than the width of the active output (OCx or OCxN) then the corresponding pulse is not generated.
The following figures show the relationships between the output signals of the dead-time generator and the reference signal OCxREF. (we suppose CCxP=0, CCxNP=0, MOE=1, CCxE=1 and CCxNE=1 in these examples)
Figure 97. Complementary output with dead-time insertion.
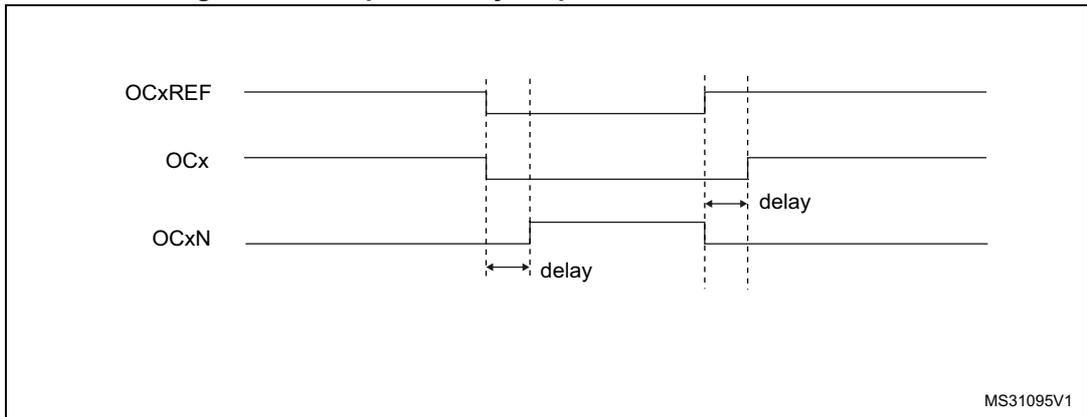
Timing diagram showing three signals: OCxREF, OCx, and OCxN. OCxREF is a reference signal. OCx and OCxN are complementary output signals. The diagram illustrates the insertion of dead-time (delay) between the transitions of OCx and OCxN. The dead-time is shown as a horizontal double-headed arrow labeled 'delay' between the falling edge of OCx and the falling edge of OCxN, and another 'delay' label between the rising edge of OCx and the rising edge of OCxN. The source identifier MS31095V1 is in the bottom right corner.
Figure 98. Dead-time waveforms with delay greater than the negative pulse.
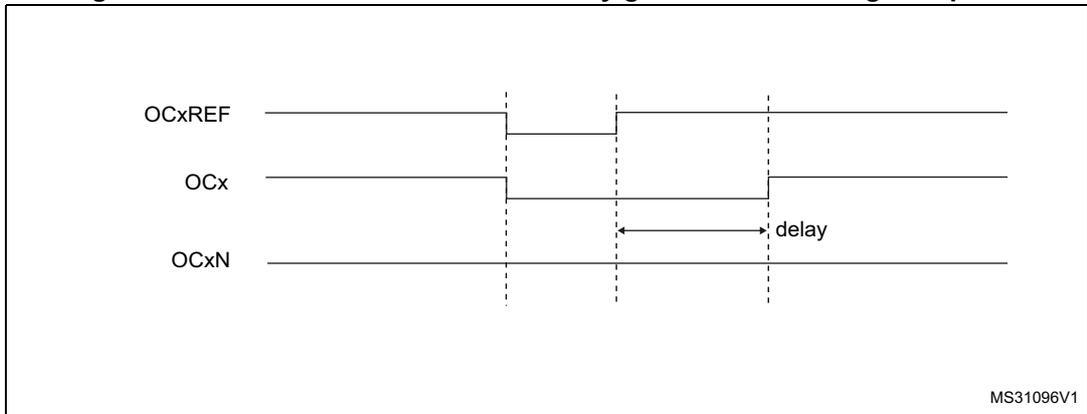
Timing diagram showing three signals: OCxREF, OCx, and OCxN. OCxREF is a reference signal. OCx and OCxN are complementary output signals. The diagram illustrates the insertion of dead-time (delay) between the transitions of OCx and OCxN. The dead-time is shown as a horizontal double-headed arrow labeled 'delay' between the falling edge of OCx and the falling edge of OCxN. The source identifier MS31096V1 is in the bottom right corner.
Figure 99. Dead-time waveforms with delay greater than the positive pulse.

Timing diagram showing three signals: OCxREF, OCx, and OCxN. OCxREF is a reference signal. OCx and OCxN are complementary output signals. The diagram illustrates the insertion of dead-time (delay) between the transitions of OCx and OCxN. The dead-time is shown as a horizontal double-headed arrow labeled 'delay' between the falling edge of OCx and the falling edge of OCxN. The source identifier MS31097V1 is in the bottom right corner.
The dead-time delay is the same for each of the channels and is programmable with the DTG bits in the TIMx_BDTR register. Refer to Section 17.4.18: TIM1 break and dead-time register (TIM1_BDTR) on page 398 for delay calculation.
Re-directing OCxREF to OCx or OCxN
In output mode (forced, output compare or PWM), OCxREF can be re-directed to the OCx output or to OCxN output by configuring the CCxE and CCxNE bits in the TIMx_CCER register.
This allows to send a specific waveform (such as PWM or static active level) on one output while the complementary remains at its inactive level. Other alternative possibilities are to have both outputs at inactive level or both outputs active and complementary with dead-time.
Note: When only OCxN is enabled (CCxE=0, CCxNE=1), it is not complemented and becomes active as soon as OCxREF is high. For example, if CCxNP=0 then OCxN=OCxRef. On the other hand, when both OCx and OCxN are enabled (CCxE=CCxNE=1) OCx becomes active when OCxREF is high whereas OCxN is complemented and becomes active when OCxREF is low.
17.3.12 Using the break function
When using the break function, the output enable signals and inactive levels are modified according to additional control bits (MOE, OSSI and OSSR bits in the TIMx_BDTR register, OISx and OISxN bits in the TIMx_CR2 register). In any case, the OCx and OCxN outputs cannot be set both to active level at a given time. Refer to Table 63: Output control bits for complementary OCx and OCxN channels with break feature on page 393 for more details.
The source for break (BRK) channel can be an external source connected to the BKIN pin or one of the following internal sources:
- • the core LOCKUP output
- • the PVD output
- • the SRAM parity error signal
- • a clock failure event generated by the CSS detector
- • the output from a comparator
When exiting from reset, the break circuit is disabled and the MOE bit is low. The break function can be enabled by setting the BKE bit in the TIMx_BDTR register. The break input polarity can be selected by configuring the BKP bit in the same register. BKE and BKP can be modified at the same time. When the BKE and BKP bits are written, a delay of 1 APB clock cycle is applied before the writing is effective. Consequently, it is necessary to wait 1 APB clock period to correctly read back the bit after the write operation.
Because MOE falling edge can be asynchronous, a resynchronization circuit has been inserted between the actual signal (acting on the outputs) and the synchronous control bit (accessed in the TIMx_BDTR register). It results in some delays between the asynchronous and the synchronous signals. In particular, if MOE is set to 1 whereas it was low, a delay must be inserted (dummy instruction) before reading it correctly. This is because the write acts on the asynchronous signal whereas the read reflects the synchronous signal.
When a break occurs (selected level on the break input):
- • The MOE bit is cleared asynchronously, putting the outputs in inactive state, idle state or in reset state (selected by the OSSI bit). This feature functions even if the MCU oscillator is off.
- • Each output channel is driven with the level programmed in the OISx bit in the TIMx_CR2 register as soon as MOE=0. If OSSI=0 then the timer releases the enable output else the enable output remains high.
- • When complementary outputs are used:
- – The outputs are first put in reset state inactive state (depending on the polarity). This is done asynchronously so that it works even if no clock is provided to the timer.
- – If the timer clock is still present, then the dead-time generator is reactivated in order to drive the outputs with the level programmed in the OISx and OISxN bits after a dead-time. Even in this case, OCx and OCxN cannot be driven to their active level together. Note that because of the resynchronization on MOE, the dead-time duration is a bit longer than usual (around 2 ck_tim clock cycles).
- – If OSSI=0 then the timer releases the enable outputs else the enable outputs remain or become high as soon as one of the CCxE or CCxNE bits is high.
- • The break status flag (BIF bit in the TIMx_SR register) is set. An interrupt can be generated if the BIE bit in the TIMx_DIER register is set.
- • If the AOE bit in the TIMx_BDTR register is set, the MOE bit is automatically set again at the next update event UEV. This can be used to perform a regulation, for instance. Else, MOE remains low until it is written with 1 again. In this case, it can be used for security and the break input can be connected to an alarm from power drivers, thermal sensors or any security components.
Note: The break inputs is acting on level. Thus, the MOE cannot be set while the break input is active (neither automatically nor by software). In the meantime, the status flag BIF cannot be cleared.
The break can be generated by the BRK input which has a programmable polarity and an enable bit BKE in the TIMx_BDTR Register.
In addition to the break input and the output management, a write protection has been implemented inside the break circuit to safeguard the application. It allows to freeze the configuration of several parameters (dead-time duration, OCx/OCxN polarities and state when disabled, OCxM configurations, break enable and polarity). The protection can be selected among 3 levels with the LOCK bits in the TIMx_BDTR register. Refer to Section 17.4.18: TIM1 break and dead-time register (TIM1_BDTR) on page 398 . The LOCK bits can be written only once after an MCU reset.
The Figure 100 shows an example of behavior of the outputs in response to a break.
Figure 100. Output behavior in response to a break
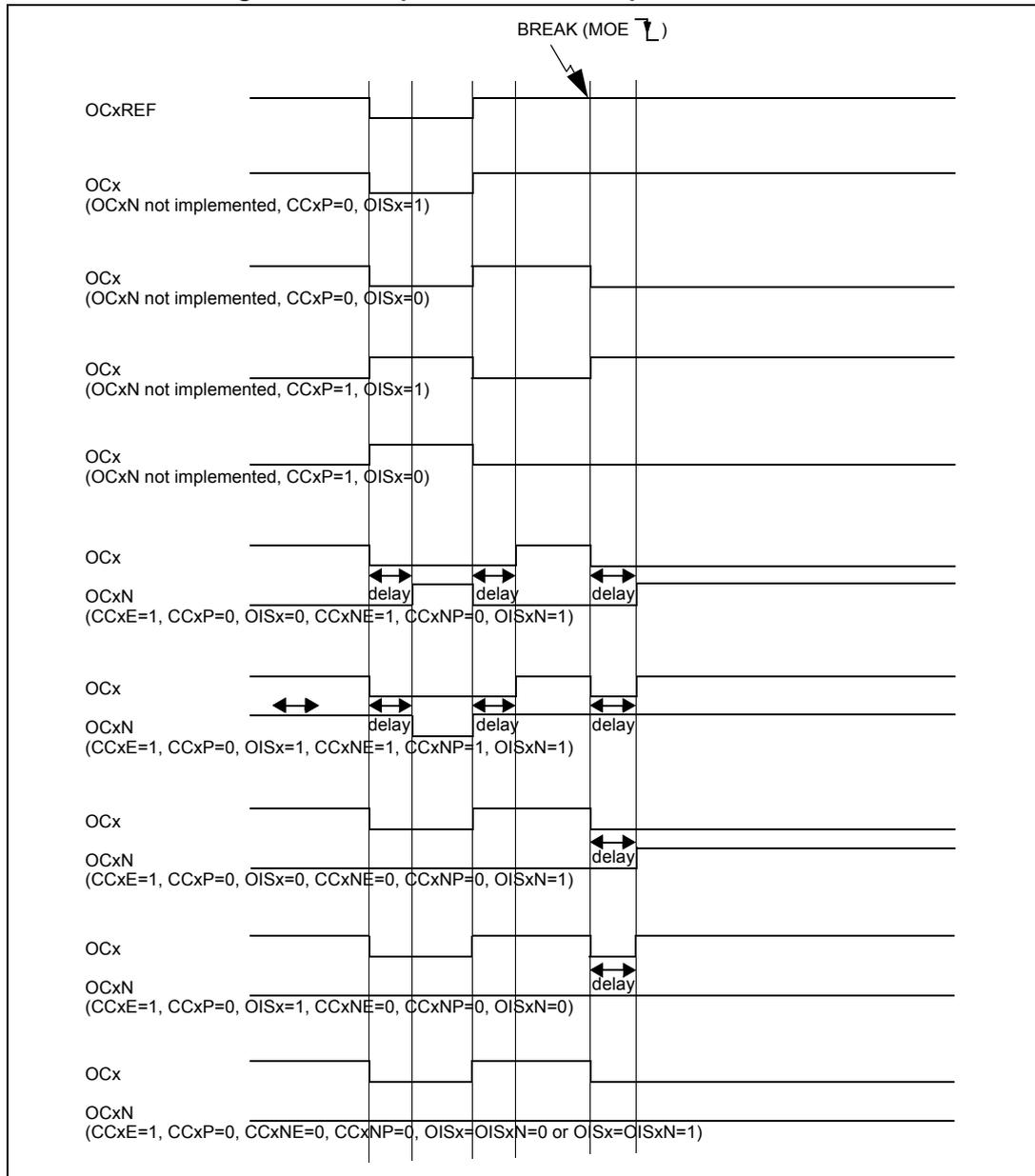
BREAK (MOE )
OCxREF
OCx
(OCxN not implemented, CCxP=0, OISx=1)
OCx
(OCxN not implemented, CCxP=0, OISx=0)
OCx
(OCxN not implemented, CCxP=1, OISx=1)
OCx
(OCxN not implemented, CCxP=1, OISx=0)
OCx
OCxN
(CCxE=1, CCxP=0, OISx=0, CCxNE=1, CCxNP=0, OISxN=1)
OCx
OCxN
(CCxE=1, CCxP=0, OISx=1, CCxNE=1, CCxNP=1, OISxN=1)
OCx
OCxN
(CCxE=1, CCxP=0, OISx=0, CCxNE=0, CCxNP=0, OISxN=1)
OCx
OCxN
(CCxE=1, CCxP=0, OISx=1, CCxNE=0, CCxNP=0, OISxN=0)
OCx
OCxN
(CCxE=1, CCxP=0, CCxNE=0, CCxNP=0, OISx=OISxN=0 or OISx=OISxN=1)
17.3.13 Clearing the OCxREF signal on an external event
The OCxREF signal of a given channel can be cleared when a high level is applied on the OCREF_CLR_INPUT (OCxCE enable bit in the corresponding TIMx_CCMRx register set to 1). OCxREF remains low until the next update event (UEV) occurs. This function can only be used in Output compare and PWM modes. It does not work in Forced mode.
OCREF_CLR_INPUT can be selected between the OCREF_CLR input and ETRF (ETR after the filter) by configuring the OCCS bit in the TIMx_SMCR register.
When ETRF is chosen, ETR must be configured as follows:
The OCxREF signal for a given channel can be driven Low by applying a High level to the ETRF input (OCxCE enable bit of the corresponding TIMx_CCMRx register set to '1'). The OCxREF signal remains Low until the next update event, UEV, occurs.
This function can only be used in output compare and PWM modes, and does not work in forced mode.
For example, the OCxREF signal can be connected to the output of a comparator to be used for current handling. In this case, the ETR must be configured as follow:
- 1. The External Trigger Prescaler should be kept off: bits ETPS[1:0] of the TIMx_SMCR register set to '00'.
- 2. The external clock mode 2 must be disabled: bit ECE of the TIMx_SMCR register set to '0'.
- 3. The External Trigger Polarity (ETP) and the External Trigger Filter (ETF) can be configured according to the user needs.
For code example refer to the Appendix section A.9.10: ETR configuration to clear OCxREF code example .
Figure 101 shows the behavior of the OCxREF signal when the ETRF Input becomes High, for both values of the enable bit OCxCE. In this example, the timer TIMx is programmed in PWM mode.
Figure 101. Clearing TIMx OCxREF
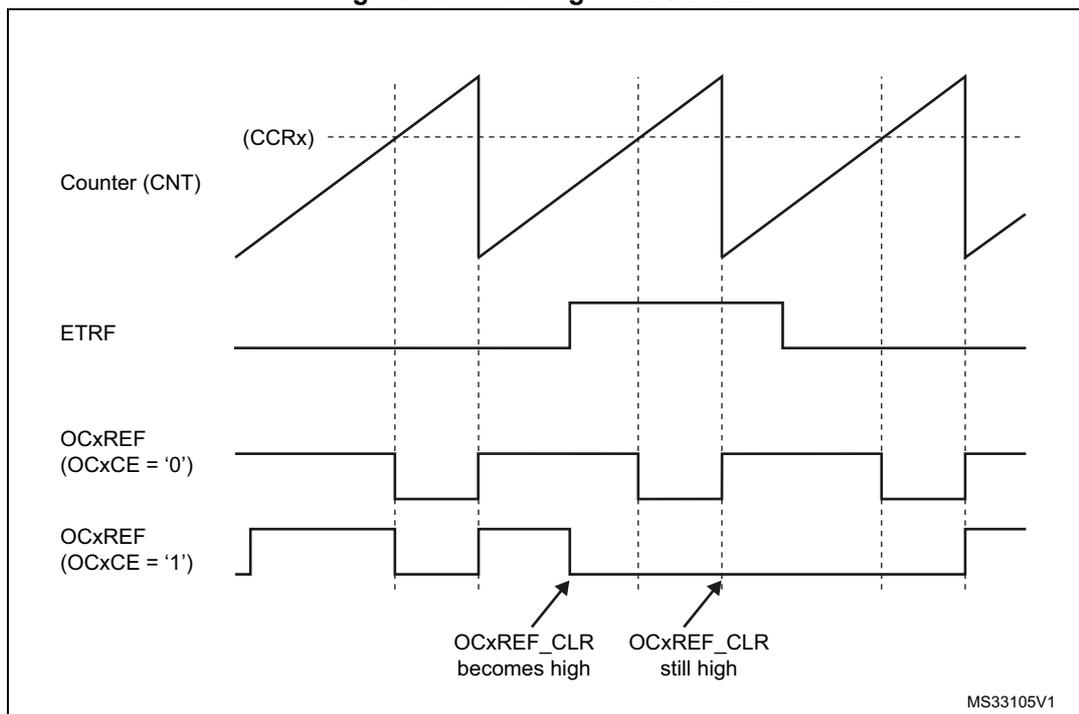
The figure is a timing diagram illustrating the clearing of the TIMx OCxREF signal. It consists of four horizontal waveforms:
- Counter (CNT) : A sawtooth waveform representing the counter value. A horizontal dashed line indicates the compare value (CCRx). The counter increments until it reaches CCRx, then resets to zero.
- ETRF : An external trigger flag signal that goes high during the first counter overflow and returns low at the second overflow.
- OCxREF (OCxCE = '0') : The output compare reference signal when OCxCE is '0'. It is initially high, then goes low at the first CCRx match, and returns high at the first counter overflow.
- OCxREF (OCxCE = '1') : The output compare reference signal when OCxCE is '1'. It is initially low, then goes high at the first CCRx match, and returns low at the first counter overflow.
Two arrows point to the rising edges of the OCxREF_CLR signal (implied by the ETRF signal):
- The first arrow is labeled "OCxREF_CLR becomes high" and points to the rising edge at the first counter overflow.
- The second arrow is labeled "OCxREF_CLR still high" and points to the signal level during the second counter overflow.
The diagram is labeled MS33105V1 in the bottom right corner.
Note: In case of a PWM with a 100% duty cycle (if \( CCRx > ARR \) ), then OCxREF is enabled again at the next counter overflow.
17.3.14 6-step PWM generation
When complementary outputs are used on a channel, preload bits are available on the OCxM, CCxE and CCxNE bits. The preload bits are transferred to the shadow bits at the COM commutation event. Thus one can program in advance the configuration for the next step and change the configuration of all the channels at the same time. COM can be generated by software by setting the COM bit in the TIMx_EGR register or by hardware (on TRGI rising edge).
A flag is set when the COM event occurs (COMIF bit in the TIMx_SR register), which can generate an interrupt (if the COMIE bit is set in the TIMx_DIER register) or a DMA request (if the COMDE bit is set in the TIMx_DIER register).
The Figure 102 describes the behavior of the OCx and OCxN outputs when a COM event occurs, in 3 different examples of programmed configurations.
Figure 102. 6-step generation, COM example (OSSR=1)
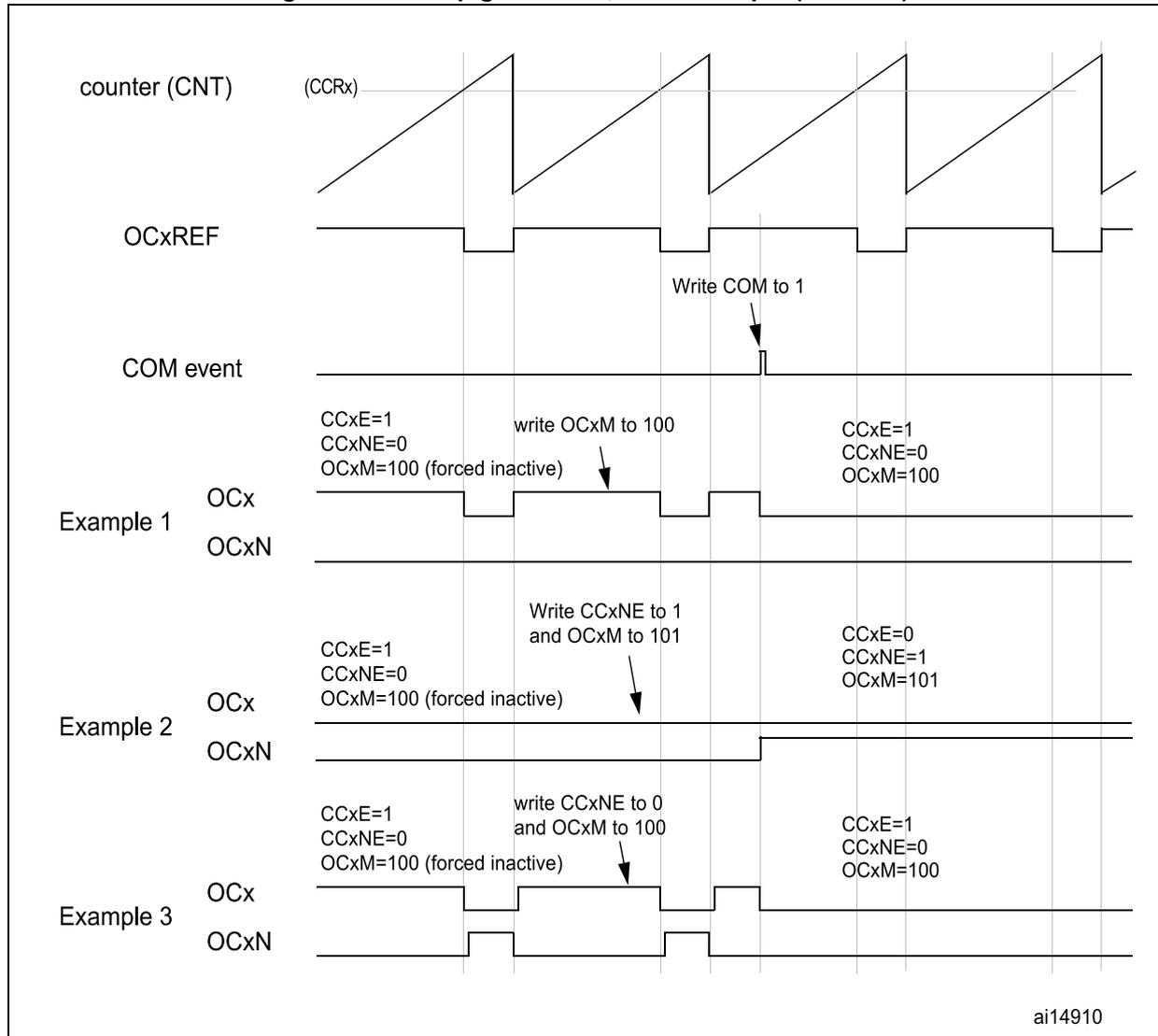
The diagram illustrates the timing of a 6-step PWM generation using complementary outputs. The top section shows the counter (CNT) with a sawtooth waveform and a compare register (CCRx) threshold. Below it is the OCxREF signal, which is a square wave derived from the counter and CCRx. A 'COM event' is indicated by a single pulse, with a 'Write COM to 1' annotation pointing to it.
The bottom section shows three examples of OCx and OCxN output behaviors, each with a different configuration change triggered by the COM event. In all examples, the initial state is CCxE=1, CCxNE=0, and OCxM=100 (forced inactive).
- Example 1: At the COM event, 'write OCxM to 100' is performed. The final state is CCxE=1, CCxNE=0, OCxM=100. The OCx output remains low, and the OCxN output remains high.
- Example 2: At the COM event, 'Write CCxNE to 1 and OCxM to 101' is performed. The final state is CCxE=0, CCxNE=1, OCxM=101. The OCx output becomes high, and the OCxN output becomes low.
- Example 3: At the COM event, 'write CCxNE to 0 and OCxM to 100' is performed. The final state is CCxE=1, CCxNE=0, OCxM=100. The OCx output remains low, and the OCxN output remains high.
ai14910
17.3.15 One-pulse mode
One-pulse mode (OPM) is a particular case of the previous modes. It allows the counter to be started in response to a stimulus and to generate a pulse with a programmable length after a programmable delay.
Starting the counter can be controlled through the slave mode controller. Generating the waveform can be done in output compare mode or PWM mode. One-pulse mode is selected by setting the OPM bit in the TIMx_CR1 register. This makes the counter stop automatically at the next update event UEV.
A pulse can be correctly generated only if the compare value is different from the counter initial value. Before starting (when the timer is waiting for the trigger), the configuration must be:
- • In upcounting: \( CNT < CCRx \leq ARR \) (in particular, \( 0 < CCRx \) )
- • In downcounting: \( CNT > CCRx \)
Figure 103. Example of one pulse mode
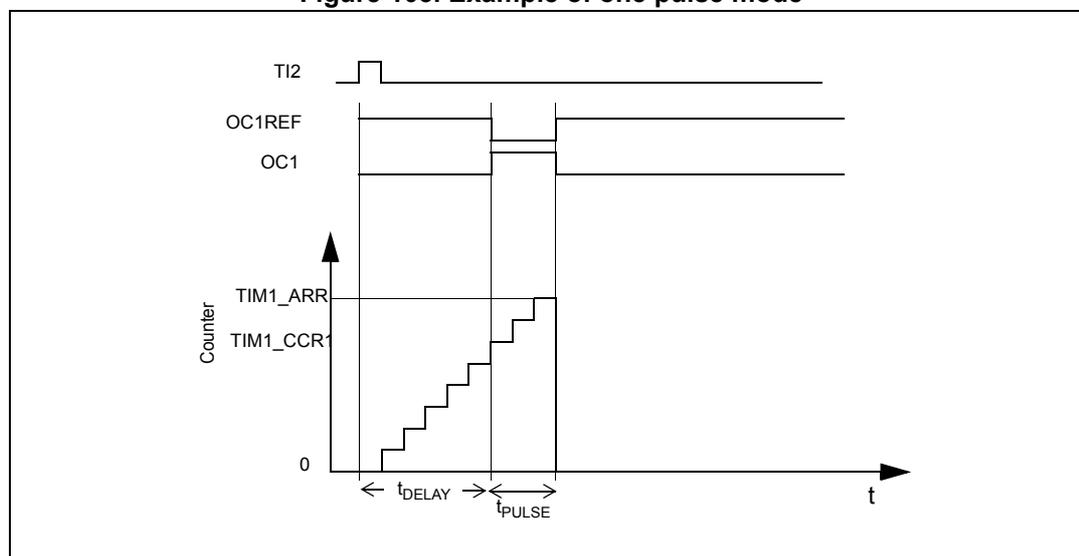
For example one may want to generate a positive pulse on OC1 with a length of \( t_{PULSE} \) and after a delay of \( t_{DELAY} \) as soon as a positive edge is detected on the TI2 input pin.
Let's use TI2FP2 as trigger 1:
- • Map TI2FP2 to TI2 by writing CC2S='01' in the TIMx_CCMR1 register.
- • TI2FP2 must detect a rising edge, write CC2P='0' and CC2NP='0' in the TIMx_CCER register.
- • Configure TI2FP2 as trigger for the slave mode controller (TRGI) by writing TS='110' in the TIMx_SMCR register.
- • TI2FP2 is used to start the counter by writing SMS to '110' in the TIMx_SMCR register (trigger mode).
The OPM waveform is defined by writing the compare registers (taking into account the clock frequency and the counter prescaler).
- • The \( t_{\text{DELAY}} \) is defined by the value written in the TIMx_CCR1 register.
- • The \( t_{\text{PULSE}} \) is defined by the difference between the auto-reload value and the compare value (TIMx_ARR - TIMx_CCR1+1).
- • Let's say one want to build a waveform with a transition from '0' to '1' when a compare match occurs and a transition from '1' to '0' when the counter reaches the auto-reload value. To do this PWM mode 2 must be enabled by writing OC1M=111 in the TIMx_CCMR1 register. Optionally the preload registers can be enabled by writing OC1PE='1' in the TIMx_CCMR1 register and ARPE in the TIMx_CR1 register. In this case one has to write the compare value in the TIMx_CCR1 register, the auto-reload value in the TIMx_ARR register, generate an update by setting the UG bit and wait for external trigger event on TI2. CC1P is written to '0' in this example.
In our example, the DIR and CMS bits in the TIMx_CR1 register should be low.
For code example refer to the Appendix section A.9.16: One-Pulse mode code example .
Since only 1 pulse (Single mode) is needed, a 1 must be written in the OPM bit in the TIMx_CR1 register to stop the counter at the next update event (when the counter rolls over from the auto-reload value back to 0). When OPM bit in the TIMx_CR1 register is set to '0', so the Repetitive Mode is selected.
Particular case: OCx fast enable
In One-pulse mode, the edge detection on TIx input set the CEN bit which enables the counter. Then the comparison between the counter and the compare value makes the output toggle. But several clock cycles are needed for these operations and it limits the minimum delay \( t_{\text{DELAY min}} \) we can get.
If one wants to output a waveform with the minimum delay, the OCxFE bit can be set in the TIMx_CCMRx register. Then OCxRef (and OCx) are forced in response to the stimulus, without taking in account the comparison. Its new level is the same as if a compare match had occurred. OCxFE acts only if the channel is configured in PWM1 or PWM2 mode.
For code example refer to the part of code, conditioned by PULSE_WITHOUT_DELAY > 0 in the Appendix section A.9.16: One-Pulse mode code example .
17.3.16 Encoder interface mode
To select Encoder Interface mode write SMS='001' in the TIMx_SMCR register if the counter is counting on TI2 edges only, SMS='010' if it is counting on TI1 edges only and SMS='011' if it is counting on both TI1 and TI2 edges.
Select the TI1 and TI2 polarity by programming the CC1P and CC2P bits in the TIMx_CCER register. When needed, the input filter can be programmed as well. CC1NP and CC2NP must be kept low.
The two inputs TI1 and TI2 are used to interface to an incremental encoder. Refer to Table 61 . The counter is clocked by each valid transition on TI1FP1 or TI2FP2 (TI1 and TI2 after input filter and polarity selection, TI1FP1=TI1 if not filtered and not inverted, TI2FP2=TI2 if not filtered and not inverted) assuming that it is enabled (CEN bit in TIMx_CR1 register written to '1'). The sequence of transitions of the two inputs is evaluated and generates count pulses as well as the direction signal. Depending on the sequence the counter counts up or down, the DIR bit in the TIMx_CR1 register is modified by hardware
accordingly. The DIR bit is calculated at each transition on any input (TI1 or TI2), whatever the counter is counting on TI1 only, TI2 only or both TI1 and TI2.
Encoder interface mode acts simply as an external clock with direction selection. This means that the counter just counts continuously between 0 and the auto-reload value in the TIMx_ARR register (0 to ARR or ARR down to 0 depending on the direction). So the TIMx_ARR must be configured before starting. In the same way, the capture, compare, prescaler, repetition counter, trigger output features continue to work as normal. Encoder mode and External clock mode 2 are not compatible and must not be selected together.
In this mode, the counter is modified automatically following the speed and the direction of the incremental encoder and its content, therefore, always represents the encoder's position. The count direction correspond to the rotation direction of the connected sensor. The table summarizes the possible combinations, assuming TI1 and TI2 do not switch at the same time.
Table 61. Counting direction versus encoder signals
| Active edge | Level on opposite signal (TI1FP1 for TI2, TI2FP2 for TI1) | TI1FP1 signal | TI2FP2 signal | ||
|---|---|---|---|---|---|
| Rising | Falling | Rising | Falling | ||
| Counting on TI1 only | High | Down | Up | No Count | No Count |
| Low | Up | Down | No Count | No Count | |
| Counting on TI2 only | High | No Count | No Count | Up | Down |
| Low | No Count | No Count | Down | Up | |
| Counting on TI1 and TI2 | High | Down | Up | Up | Down |
| Low | Up | Down | Down | Up | |
An external incremental encoder can be connected directly to the MCU without external interface logic. However, comparators are normally used to convert the encoder's differential outputs to digital signals. This greatly increases noise immunity. The third encoder output which indicate the mechanical zero position, may be connected to an external interrupt input and trigger a counter reset.
Figure 104 gives an example of counter operation, showing count signal generation and direction control. It also shows how input jitter is compensated where both edges are selected. This might occur if the sensor is positioned near to one of the switching points. For this example we assume that the configuration is the following:
- • CC1S='01' (TIMx_CCMR1 register, TI1FP1 mapped on TI1).
- • CC2S='01' (TIMx_CCMR2 register, TI1FP2 mapped on TI2).
- • CC1P='0' (TIMx_CCER register, TI1FP1 non-inverted, TI1FP1=TI1).
- • CC2P='0' (TIMx_CCER register, TI1FP2 non-inverted, TI1FP2= TI2).
- • SMS='011' (TIMx_SMCR register, both inputs are active on both rising and falling edges).
- • CEN='1' (TIMx_CR1 register, Counter enabled).
For code example refer to the Appendix section A.9.11: Encoder interface code example .
Figure 104. Example of counter operation in encoder interface mode.
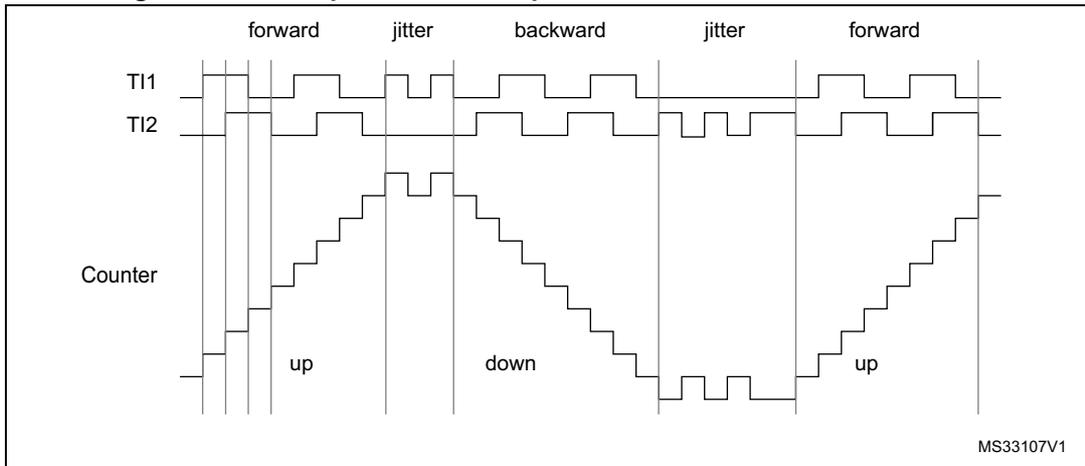
Timing diagram showing the relationship between encoder signals TI1 and TI2, and the Counter value over time. The diagram is divided into five phases: forward, jitter, backward, jitter, and forward. In the forward phases, the counter increments ('up'). In the backward phase, the counter decrements ('down'). The jitter phases show signal noise on TI1 and TI2 without affecting the counter's direction. MS33107V1 is noted in the bottom right.
Figure 105 gives an example of counter behavior when TI1FP1 polarity is inverted (same configuration as above except CC1P='1').
Figure 105. Example of encoder interface mode with TI1FP1 polarity inverted.
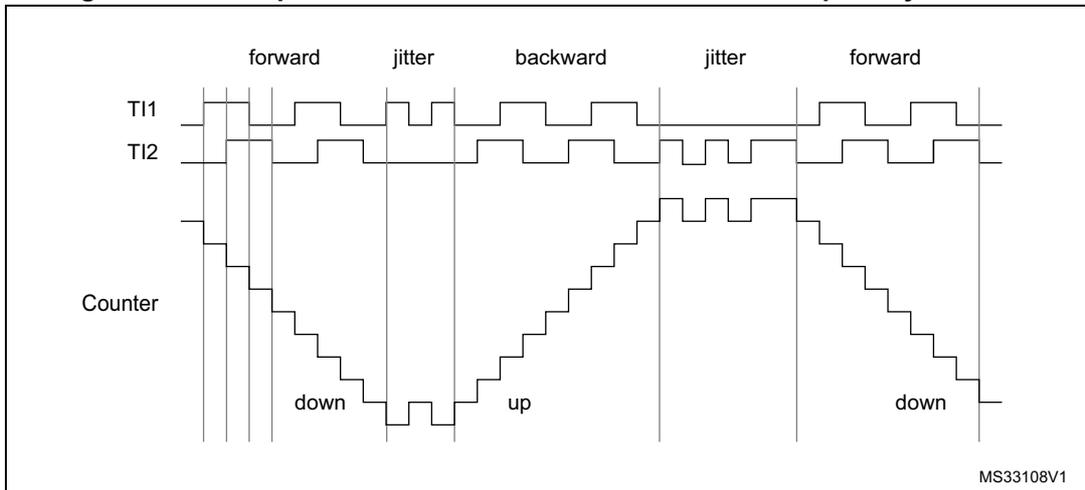
Timing diagram showing the relationship between encoder signals TI1 and TI2, and the Counter value over time, with TI1FP1 polarity inverted. The diagram is divided into five phases: forward, jitter, backward, jitter, and forward. In the forward phases, the counter decrements ('down'). In the backward phase, the counter increments ('up'). The jitter phases show signal noise on TI1 and TI2 without affecting the counter's direction. MS33108V1 is noted in the bottom right.
The timer, when configured in Encoder Interface mode provides information on the sensor's current position. Dynamic information can be obtained (speed, acceleration, deceleration) by measuring the period between two encoder events using a second timer configured in capture mode. The output of the encoder which indicates the mechanical zero can be used for this purpose. Depending on the time between two events, the counter can also be read at regular times. This can be done by latching the counter value into a third input capture register if available (then the capture signal must be periodic and can be generated by another timer). When available, it is also possible to read its value through a DMA request generated by a real-time clock.
17.3.17 Timer input XOR function
The TI1S bit in the TIMx_CR2 register, allows the input filter of channel 1 to be connected to the output of a XOR gate, combining the three input pins TIMx_CH1, TIMx_CH2 and TIMx_CH3.
The XOR output can be used with all the timer input functions such as trigger or input capture. An example of this feature used to interface Hall sensors is given in Section 17.3.18 below.
17.3.18 Interfacing with Hall sensors
This is done using the advanced-control timers (TIM1) to generate PWM signals to drive the motor and another timer TIMx (TIM2 or TIM3) referred to as “interfacing timer” in Figure 106 . The “interfacing timer” captures the 3 timer input pins (CC1, CC2, CC3) connected through a XOR to the TI1 input channel (selected by setting the TI1S bit in the TIMx_CR2 register).
The slave mode controller is configured in reset mode; the slave input is TI1F_ED. Thus, each time one of the 3 inputs toggles, the counter restarts counting from 0. This creates a time base triggered by any change on the Hall inputs.
On the “interfacing timer”, capture/compare channel 1 is configured in capture mode, capture signal is TRC (See Figure 89: Capture/compare channel (example: channel 1 input stage) on page 348 ). The captured value, which corresponds to the time elapsed between 2 changes on the inputs, gives information about motor speed.
The “interfacing timer” can be used in output mode to generate a pulse which changes the configuration of the channels of the advanced-control timer (TIM1) (by triggering a COM event). The TIM1 timer is used to generate PWM signals to drive the motor. To do this, the interfacing timer channel must be programmed so that a positive pulse is generated after a programmed delay (in output compare or PWM mode). This pulse is sent to the advanced-control timer (TIM1) through the TRGO output.
Example: one wants to change the PWM configuration of the advanced-control timer TIM1 after a programmed delay each time a change occurs on the Hall inputs connected to one of the TIMx timers.
- • Configure 3 timer inputs XORed to the TI1 input channel by writing the TI1S bit in the TIMx_CR2 register to ‘1’,
- • Program the time base: write the TIMx_ARR to the max value (the counter must be cleared by the TI1 change. Set the prescaler to get a maximum counter period longer than the time between 2 changes on the sensors,
- • Program channel 1 in capture mode (TRC selected): write the CC1S bits in the TIMx_CCMR1 register to ‘01’. The digital filter can also be programmed if needed,
- • Program channel 2 in PWM 2 mode with the desired delay: write the OC2M bits to ‘111’ and the CC2S bits to ‘00’ in the TIMx_CCMR1 register,
- • Select OC2REF as trigger output on TRGO: write the MMS bits in the TIMx_CR2 register to ‘101’,
In the advanced-control timer TIM1, the right ITR input must be selected as trigger input, the timer is programmed to generate PWM signals, the capture/compare control signals are preloaded (CCPC=1 in the TIMx_CR2 register) and the COM event is controlled by the trigger input (CCUS=1 in the TIMx_CR2 register). The PWM control bits (CCxE, OCxM) are written after a COM event for the next step (this can be done in an interrupt subroutine generated by the rising edge of OC2REF).
Figure 106 describes this example.
Figure 106. Example of hall sensor interface
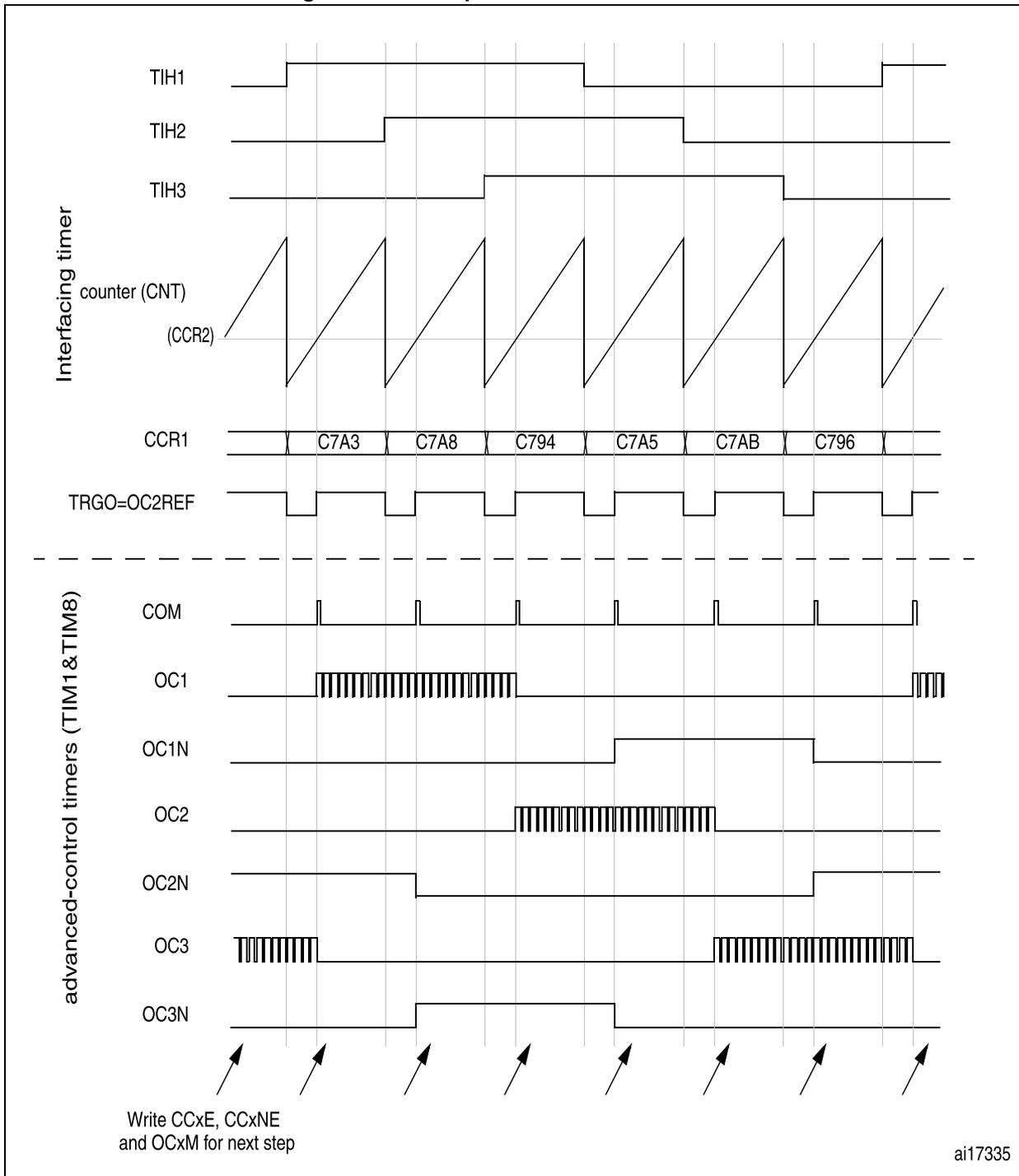
The timing diagram illustrates the relationship between an interfacing timer and advanced-control timers (TIM1&TIM8) for a hall sensor interface. The signals are as follows:
- Interfacing timer:
- TIH1, TIH2, TIH3: Hall sensor inputs. TIH1 is high from the first to the fourth rising edge of the counter. TIH2 is high from the second to the fifth rising edge. TIH3 is high from the third to the sixth rising edge.
- counter (CNT) (CCR2): A sawtooth wave representing the timer counter, with rising edges at regular intervals.
- CCR1: Capture/Compare Register 1 values: C7A3, C7A8, C794, C7A5, C7AB, C796.
- TRGO=OC2REF: A square wave output that toggles state at each rising edge of the counter.
- advanced-control timers (TIM1&TIM8):
- COM: A narrow pulse that occurs at every rising edge of the counter.
- OC1: Output Compare 1. It is a high-frequency PWM signal starting at the first rising edge and ending at the fourth. It is also a PWM signal starting at the seventh rising edge.
- OC1N: Inverted Output Compare 1. It is high from the fourth to the sixth rising edge.
- OC2: Output Compare 2. It is a high-frequency PWM signal starting at the third rising edge and ending at the fifth.
- OC2N: Inverted Output Compare 2. It is high from the second to the sixth rising edge.
- OC3: Output Compare 3. It is a high-frequency PWM signal starting at the first rising edge and ending at the third. It is also a PWM signal starting at the fifth rising edge.
- OC3N: Inverted Output Compare 3. It is high from the second to the fourth rising edge.
At the bottom, eight arrows point to the time intervals between the rising edges of the counter, with the text: "Write CCxE, CCxNE and OCxM for next step". The identifier "ai17335" is in the bottom right corner.
17.3.19 TIMx and external trigger synchronization
The TIMx timer can be synchronized with an external trigger in several modes: Reset mode, Gated mode and Trigger mode.
Slave mode: Reset mode
The counter and its prescaler can be reinitialized in response to an event on a trigger input. Moreover, if the URS bit from the TIMx_CR1 register is low, an update event UEV is generated. Then all the preloaded registers (TIMx_ARR, TIMx_CCRx) are updated.
In the following example, the upcounter is cleared in response to a rising edge on TI1 input:
- • Configure the channel 1 to detect rising edges on TI1. Configure the input filter duration (in this example, we do not need any filter, so we keep IC1F=0000). The capture prescaler is not used for triggering, so it does not need to be configured. The CC1S bits select the input capture source only, CC1S = 01 in the TIMx_CCMR1 register. Write CC1P=0 and CC1NP=0' in TIMx_CCER register to validate the polarity (and detect rising edges only).
- • Configure the timer in reset mode by writing SMS=100 in TIMx_SMCR register. Select TI1 as the input source by writing TS=101 in TIMx_SMCR register.
- • Start the counter by writing CEN=1 in the TIMx_CR1 register.
For code example refer to the Appendix section A.9.12: Reset mode code example .
The counter starts counting on the internal clock, then behaves normally until TI1 rising edge. When TI1 rises, the counter is cleared and restarts from 0. In the meantime, the trigger flag is set (TIF bit in the TIMx_SR register) and an interrupt request, or a DMA request can be sent if enabled (depending on the TIE and TDE bits in TIMx_DIER register).
The following figure shows this behavior when the auto-reload register TIMx_ARR=0x36. The delay between the rising edge on TI1 and the actual reset of the counter is due to the resynchronization circuit on TI1 input.
Figure 107. Control circuit in reset mode
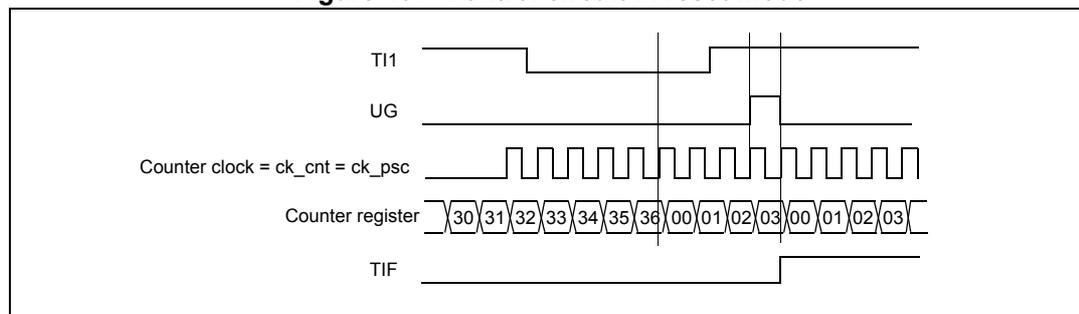
The counter can be enabled depending on the level of a selected input.
In the following example, the upcounter counts only when TI1 input is low:
- • Configure the channel 1 to detect low levels on TI1. Configure the input filter duration (in this example, we do not need any filter, so we keep IC1F=0000). The capture prescaler is not used for triggering, so it does not need to be configured. The CC1S bits select the input capture source only, CC1S=01 in TIMx_CCMR1 register. Write CC1P=1 and CC1NP=0' in TIMx_CCER register to validate the polarity (and detect low level only).
- • Configure the timer in gated mode by writing SMS=101 in TIMx_SMCR register. Select TI1 as the input source by writing TS=101 in TIMx_SMCR register.
- • Enable the counter by writing CEN=1 in the TIMx_CR1 register (in gated mode, the counter doesn't start if CEN=0, whatever is the trigger input level).
For code example refer to the Appendix section A.9.13: Gated mode code example .
The counter starts counting on the internal clock as long as TI1 is low and stops as soon as TI1 becomes high. The TIF flag in the TIMx_SR register is set both when the counter starts or stops.
The delay between the rising edge on TI1 and the actual stop of the counter is due to the resynchronization circuit on TI1 input.
Figure 108. Control circuit in gated mode
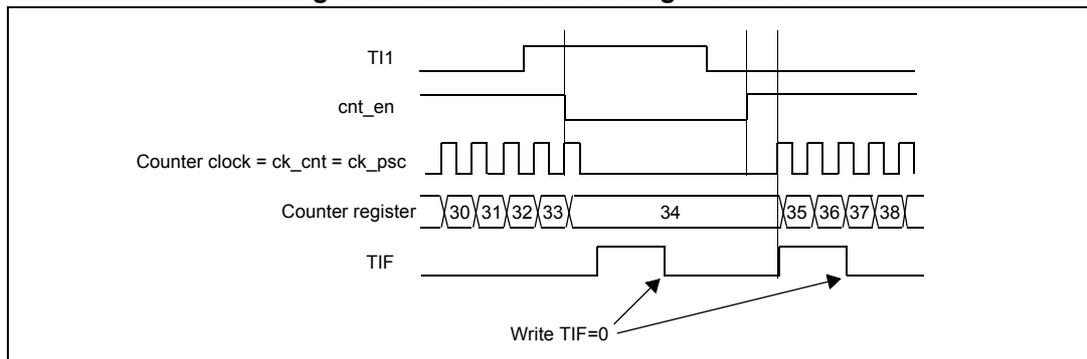
Slave mode: Trigger mode
The counter can start in response to an event on a selected input.
In the following example, the upcounter starts in response to a rising edge on TI2 input:
- • Configure the channel 2 to detect rising edges on TI2. Configure the input filter duration (in this example, we do not need any filter, so we keep IC2F=0000). The capture prescaler is not used for triggering, so it does not need to be configured. The CC2S bits are configured to select the input capture source only, CC2S=01 in TIMx_CCMR1 register. Write CC2P=1 and CC2NP=0 in TIMx_CCER register to validate the polarity (and detect low level only).
- • Configure the timer in trigger mode by writing SMS=110 in TIMx_SMCR register. Select TI2 as the input source by writing TS=110 in TIMx_SMCR register.
For code example refer to the Appendix section A.9.14: Trigger mode code example .
When a rising edge occurs on TI2, the counter starts counting on the internal clock and the TIF flag is set.
The delay between the rising edge on TI2 and the actual start of the counter is due to the resynchronization circuit on TI2 input.
Figure 109. Control circuit in trigger mode
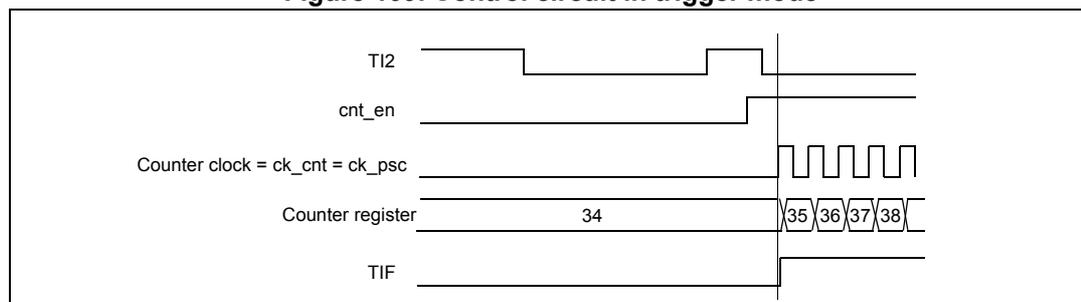
The diagram illustrates the timing relationship between the TI2 input, counter enable (cnt_en), counter clock, counter register, and the TIF flag.
- TI2: Shows a rising edge that triggers the counter.
- cnt_en: The counter enable signal, which goes high following the rising edge of TI2.
- Counter clock = ck_cnt = ck_psc: A periodic square wave representing the internal clock.
- Counter register: Shows the count values. It starts at 34 and increments to 35, 36, 37, and 38 upon subsequent rising edges of the counter clock.
- TIF: The Timer Interrupt Flag, which is set (goes high) at the rising edge of TI2.
Slave mode: external clock mode 2 + trigger mode
The external clock mode 2 can be used in addition to another slave mode (except external clock mode 1 and encoder mode). In this case, the ETR signal is used as external clock input, and another input can be selected as trigger input (in reset mode, gated mode or trigger mode). It is recommended not to select ETR as TRGI through the TS bits of TIMx_SMCR register.
In the following example, the upcounter is incremented at each rising edge of the ETR signal as soon as a rising edge of TI1 occurs:
- 1. Configure the external trigger input circuit by programming the TIMx_SMCR register as follows:
- – ETF = 0000: no filter
- – ETPS=00: prescaler disabled
- – ETP=0: detection of rising edges on ETR and ECE=1 to enable the external clock mode 2.
- 2. Configure the channel 1 as follows, to detect rising edges on TI1:
- – IC1F=0000: no filter.
- – The capture prescaler is not used for triggering and does not need to be configured.
- – CC1S=01 in TIMx_CCMR1 register to select only the input capture source
- – CC1P=0 and CC1NP='0' in TIMx_CCER register to validate the polarity (and detect rising edge only).
- 3. Configure the timer in trigger mode by writing SMS=110 in TIMx_SMCR register. Select TI1 as the input source by writing TS=101 in TIMx_SMCR register.
For code example refer to the Appendix section A.9.15: External clock mode 2 + trigger mode code example .
A rising edge on TI1 enables the counter and sets the TIF flag. The counter then counts on ETR rising edges.
The delay between the rising edge of the ETR signal and the actual reset of the counter is due to the resynchronization circuit on ETRP input.
Figure 110. Control circuit in external clock mode 2 + trigger mode
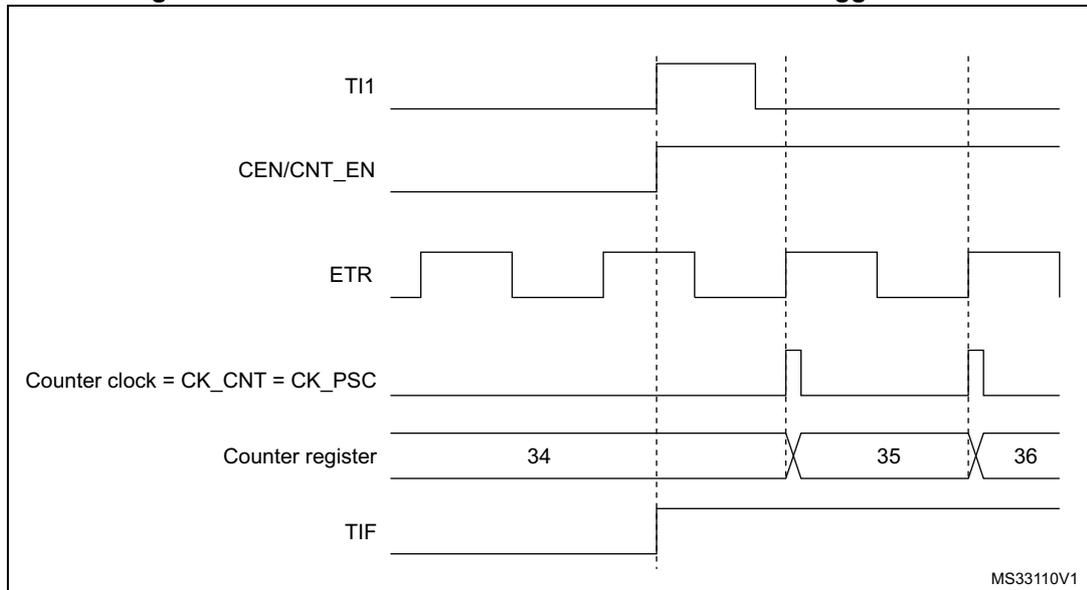
The timing diagram illustrates the control circuit in external clock mode 2 + trigger mode. The signals shown are:
- TI1 : Input signal. A rising edge at the first vertical dashed line enables the counter.
- CEN/CNT_EN : Counter enable signal. It goes high when TI1 has a rising edge and stays high until a falling edge on ETR.
- ETR : External trigger signal. It is a periodic square wave. Rising edges occur at the second and third vertical dashed lines.
- Counter clock = CK_CNT = CK_PSC : The counter clock is derived from the ETR signal. It is high when ETR is high and low when ETR is low.
- Counter register : The counter register values are 34, 35, and 36. The value 34 is shown before the second dashed line. The value 35 is shown between the second and third dashed lines. The value 36 is shown after the third dashed line. The counter increments on the rising edges of the counter clock (which correspond to the rising edges of ETR).
- TIF : Timer interrupt flag. It goes high when TI1 has a rising edge and stays high until the counter is disabled (when CEN/CNT_EN goes low).
MS33110V1
17.3.20 Timer synchronization
The TIM timers are linked together internally for timer synchronization or chaining. Refer to Section 18.3.15: Timer synchronization on page 439 for details.
17.3.21 Debug mode
When the microcontroller enters debug mode (Cortex™-M0 core halted), the TIMx counter either continues to work normally or stops, depending on DBG_TIMx_STOP configuration bit in DBG module.
17.4 TIM1 registers
Refer to Section 1.2 on page 42 for a list of abbreviations used in register descriptions.
17.4.1 TIM1 control register 1 (TIM1_CR1)
Address offset: 0x00
Reset value: 0x0000
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Res. | Res. | Res. | Res. | Res. | Res. | CKD[1:0] | ARPE | CMS[1:0] | DIR | OPM | URS | UDIS | CEN | ||
| rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | ||||||
Bits 15:10 Reserved, must be kept at reset value.
Bits 9:8 CKD[1:0] : Clock division
This bit-field indicates the division ratio between the timer clock (CK_INT) frequency and the dead-time and sampling clock ( \( t_{DTS} \) ) used by the dead-time generators and the digital filters (ETR, TIx),
00: \( t_{DTS}=t_{CK\_INT} \)
01: \( t_{DTS}=2 \cdot t_{CK\_INT} \)
10: \( t_{DTS}=4 \cdot t_{CK\_INT} \)
11: Reserved, do not program this value
Bit 7 ARPE : Auto-reload preload enable
0: TIMx_ARR register is not buffered
1: TIMx_ARR register is buffered
Bits 6:5 CMS[1:0] : Center-aligned mode selection
00: Edge-aligned mode. The counter counts up or down depending on the direction bit (DIR).
01: Center-aligned mode 1. The counter counts up and down alternatively. Output compare interrupt flags of channels configured in output (CCxS=00 in TIMx_CCMRx register) are set only when the counter is counting down.
10: Center-aligned mode 2. The counter counts up and down alternatively. Output compare interrupt flags of channels configured in output (CCxS=00 in TIMx_CCMRx register) are set only when the counter is counting up.
11: Center-aligned mode 3. The counter counts up and down alternatively. Output compare interrupt flags of channels configured in output (CCxS=00 in TIMx_CCMRx register) are set both when the counter is counting up or down.
Note: It is not allowed to switch from edge-aligned mode to center-aligned mode as long as the counter is enabled (CEN=1).
Bit 4 DIR : Direction
0: Counter used as upcounter
1: Counter used as downcounter
Note: This bit is read only when the timer is configured in Center-aligned mode or Encoder mode.
Bit 3 OPM : One pulse mode
0: Counter is not stopped at update event
1: Counter stops counting at the next update event (clearing the bit CEN)
Bit 2 URS : Update request source
This bit is set and cleared by software to select the UEV event sources.
0: Any of the following events generate an update interrupt or DMA request if enabled. These events can be:
- – Counter overflow/underflow
- – Setting the UG bit
- – Update generation through the slave mode controller
1: Only counter overflow/underflow generates an update interrupt or DMA request if enabled.
Bit 1 UDIS : Update disable
This bit is set and cleared by software to enable/disable UEV event generation.
0: UEV enabled. The Update (UEV) event is generated by one of the following events:
- – Counter overflow/underflow
- – Setting the UG bit
- – Update generation through the slave mode controller
Buffered registers are then loaded with their preload values.
1: UEV disabled. The Update event is not generated, shadow registers keep their value (ARR, PSC, CCRx). However the counter and the prescaler are reinitialized if the UG bit is set or if a hardware reset is received from the slave mode controller.
Bit 0 CEN : Counter enable
0: Counter disabled
1: Counter enabled
Note: External clock, gated mode and encoder mode can work only if the CEN bit has been previously set by software. However trigger mode can set the CEN bit automatically by hardware.
17.4.2 TIM1 control register 2 (TIM1_CR2)
Address offset: 0x04
Reset value: 0x0000
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Res. | OIS4 | OIS3N | OIS3 | OIS2N | OIS2 | OIS1N | OIS1 | TI1S | MMS[2:0] | CCDS | CCUS | Res. | CCPC | ||
| rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | ||
Bit 15 Reserved, must be kept at reset value.
Bit 14
OIS4
: Output Idle state 4 (OC4 output)
refer to OIS1 bit
Bit 13
OIS3N
: Output Idle state 3 (OC3N output)
refer to OIS1N bit
Bit 12
OIS3
: Output Idle state 3 (OC3 output)
refer to OIS1 bit
Bit 11
OIS2N
: Output Idle state 2 (OC2N output)
refer to OIS1N bit
Bit 10
OIS2
: Output Idle state 2 (OC2 output)
refer to OIS1 bit
Bit 9 OIS1N : Output Idle state 1 (OC1N output)
0: OC1N=0 after a dead-time when MOE=0
1: OC1N=1 after a dead-time when MOE=0
Note: This bit cannot be modified as long as LOCK level 1, 2 or 3 has been programmed (LOCK bits in TIMx_BDTR register).
Bit 8 OIS1 : Output Idle state 1 (OC1 output)
0: OC1=0 (after a dead-time if OC1N is implemented) when MOE=0
1: OC1=1 (after a dead-time if OC1N is implemented) when MOE=0
Note: This bit cannot be modified as long as LOCK level 1, 2 or 3 has been programmed (LOCK bits in TIMx_BDTR register).
Bit 7 TI1S : TI1 selection
0: The TIMx_CH1 pin is connected to TI1 input
1: The TIMx_CH1, CH2 and CH3 pins are connected to the TI1 input (XOR combination)
Bits 6:4 MMS[2:0] : Master mode selection
These bits allow to select the information to be sent in master mode to slave timers for synchronization (TRGO). The combination is as follows:
000: Reset - the UG bit from the TIMx_EGR register is used as trigger output (TRGO). If the reset is generated by the trigger input (slave mode controller configured in reset mode) then the signal on TRGO is delayed compared to the actual reset.
001: Enable - the Counter Enable signal CNT_EN is used as trigger output (TRGO). It is useful to start several timers at the same time or to control a window in which a slave timer is enable. The Counter Enable signal is generated by a logic OR between CEN control bit and the trigger input when configured in gated mode. When the Counter Enable signal is controlled by the trigger input, there is a delay on TRGO, except if the master/slave mode is selected (see the MSM bit description in TIMx_SMCR register).
010: Update - The update event is selected as trigger output (TRGO). For instance a master timer can then be used as a prescaler for a slave timer.
011: Compare Pulse - The trigger output send a positive pulse when the CC1IF flag is to be set (even if it was already high), as soon as a capture or a compare match occurred. (TRGO).
100: Compare - OC1REF signal is used as trigger output (TRGO)
101: Compare - OC2REF signal is used as trigger output (TRGO)
110: Compare - OC3REF signal is used as trigger output (TRGO)
111: Compare - OC4REF signal is used as trigger output (TRGO)
Bit 3 CCDS : Capture/compare DMA selection
0: CCx DMA request sent when CCx event occurs
1: CCx DMA requests sent when update event occurs
Bit 2 CCUS : Capture/compare control update selection
0: When capture/compare control bits are preloaded (CCPC=1), they are updated by setting the COMG bit only
1: When capture/compare control bits are preloaded (CCPC=1), they are updated by setting the COMG bit or when an rising edge occurs on TRGI
Note: This bit acts only on channels that have a complementary output.
Bit 1 Reserved, must be kept at reset value.
Bit 0 CCPC : Capture/compare preloaded control
0: CCxE, CCxNE and OCxM bits are not preloaded
1: CCxE, CCxNE and OCxM bits are preloaded, after having been written, they are updated only when a communication event (COM) occurs (COMG bit set or rising edge detected on TRGI, depending on the CCUS bit).
Note: This bit acts only on channels that have a complementary output.
17.4.3 TIM1 slave mode control register (TIM1_SMCR)
Address offset: 0x08
Reset value: 0x0000
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ETP | ECE | ETPS[1:0] | ETF[3:0] | MSM | TS[2:0] | OCCS | SMS[2:0] | ||||||||
| rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw |
Bit 15 ETP : External trigger polarity
This bit selects whether ETR or \( \overline{ETR} \) is used for trigger operations
0: ETR is non-inverted, active at high level or rising edge.
1: ETR is inverted, active at low level or falling edge.
Bit 14 ECE : External clock enable
This bit enables External clock mode 2.
0: External clock mode 2 disabled
1: External clock mode 2 enabled. The counter is clocked by any active edge on the ETRF signal.
Note: 1: Setting the ECE bit has the same effect as selecting external clock mode 1 with TRGI connected to ETRF (SMS=111 and TS=111).
2: It is possible to simultaneously use external clock mode 2 with the following slave modes: reset mode, gated mode and trigger mode. Nevertheless, TRGI must not be connected to ETRF in this case (TS bits must not be 111).
3: If external clock mode 1 and external clock mode 2 are enabled at the same time, the external clock input is ETRF.
Bits 13:12 ETPS[1:0] : External trigger prescaler
External trigger signal ETRP frequency must be at most 1/4 of TIMxCLK frequency. A prescaler can be enabled to reduce ETRP frequency. It is useful when inputting fast external clocks.
00: Prescaler OFF
01: ETRP frequency divided by 2
10: ETRP frequency divided by 4
11: ETRP frequency divided by 8
Bits 11:8 ETF[3:0] : External trigger filterThis bit-field then defines the frequency used to sample ETRP signal and the length of the digital filter applied to ETRP. The digital filter is made of an event counter in which N consecutive events are needed to validate a transition on the output:
- 0000: No filter, sampling is done at \( f_{DTS} \)
- 0001: \( f_{SAMPLING} = f_{CK\_INT} \) , N = 2
- 0010: \( f_{SAMPLING} = f_{CK\_INT} \) , N = 4
- 0011: \( f_{SAMPLING} = f_{CK\_INT} \) , N = 8
- 0100: \( f_{SAMPLING} = f_{DTS} / 2 \) , N = 6
- 0101: \( f_{SAMPLING} = f_{DTS} / 2 \) , N = 8
- 0110: \( f_{SAMPLING} = f_{DTS} / 4 \) , N = 6
- 0111: \( f_{SAMPLING} = f_{DTS} / 4 \) , N = 8
- 1000: \( f_{SAMPLING} = f_{DTS} / 8 \) , N = 6
- 1001: \( f_{SAMPLING} = f_{DTS} / 8 \) , N = 8
- 1010: \( f_{SAMPLING} = f_{DTS} / 16 \) , N = 5
- 1011: \( f_{SAMPLING} = f_{DTS} / 16 \) , N = 6
- 1100: \( f_{SAMPLING} = f_{DTS} / 16 \) , N = 8
- 1101: \( f_{SAMPLING} = f_{DTS} / 32 \) , N = 5
- 1110: \( f_{SAMPLING} = f_{DTS} / 32 \) , N = 6
- 1111: \( f_{SAMPLING} = f_{DTS} / 32 \) , N = 8
Note: Care must be taken that \( f_{DTS} \) is replaced in the formula by \( CK\_INT \) when \( ETF[3:0] = 1, 2 \) or \( 3 \) .
Bit 7 MSM : Master/slave mode- 0: No action
- 1: The effect of an event on the trigger input (TRGI) is delayed to allow a perfect synchronization between the current timer and its slaves (through TRGO). It is useful if we want to synchronize several timers on a single external event.
Bits 6:4 TS[2:0] : Trigger selection
This bit-field selects the trigger input to be used to synchronize the counter.
- 000: Internal Trigger 0 (ITR0)
- 001: Internal Trigger 1 (ITR1)
- 010: Internal Trigger 2 (ITR2)
- 011: Internal Trigger 3 (ITR3)
- 100: TI1 Edge Detector (TI1F_ED)
- 101: Filtered Timer Input 1 (TI1FP1)
- 110: Filtered Timer Input 2 (TI2FP2)
- 111: External Trigger input (ETRF)
See Table 62: TIMx Internal trigger connection on page 380 for more details on ITRx meaning for each Timer.
Note: These bits must be changed only when they are not used (e.g. when SMS=000) to avoid wrong edge detections at the transition.
Bit 3 OCRS : OCREF clear selection.
This bit is used to select the OCREF clear source.
- 0:OCREF_CLR_INT is connected to the OCREF_CLR input
- 1: OCREF_CLR_INT is connected to ETRF
Bits 2:0 SMS[2:0] : Slave mode selection
When external signals are selected the active edge of the trigger signal (TRGI) is linked to the polarity selected on the external input (see Input Control register and Control Register description.
- 000: Slave mode disabled - if CEN = '1' then the prescaler is clocked directly by the internal clock.
- 001: Encoder mode 1 - Counter counts up/down on TI1FP1 edge depending on TI2FP2 level.
- 010: Encoder mode 2 - Counter counts up/down on TI2FP2 edge depending on TI1FP1 level.
- 011: Encoder mode 3 - Counter counts up/down on both TI1FP1 and TI2FP2 edges depending on the level of the other input.
- 100: Reset Mode - Rising edge of the selected trigger input (TRGI) reinitializes the counter and generates an update of the registers.
- 101: Gated Mode - The counter clock is enabled when the trigger input (TRGI) is high. The counter stops (but is not reset) as soon as the trigger becomes low. Both start and stop of the counter are controlled.
- 110: Trigger Mode - The counter starts at a rising edge of the trigger TRGI (but it is not reset). Only the start of the counter is controlled.
- 111: External Clock Mode 1 - Rising edges of the selected trigger (TRGI) clock the counter.
Note: The gated mode must not be used if TI1F_ED is selected as the trigger input (TS='100'). Indeed, TI1F_ED outputs 1 pulse for each transition on TI1F, whereas the gated mode checks the level of the trigger signal.
Note: The clock of the slave timer must be enabled prior to receive events from the master timer, and must not be changed on-the-fly while triggers are received from the master timer.
Table 62. TIMx Internal trigger connection
| Slave TIM | ITR0 (TS = 000) | ITR1 (TS = 001) | ITR2 (TS = 010) | ITR3 (TS = 011) |
|---|---|---|---|---|
| TIM1 | TIM15 | TIM2 | TIM3 | TIM17 |
17.4.4 TIM1 DMA/interrupt enable register (TIM1_DIER)
Address offset: 0x0C
Reset value: 0x0000
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Res. | TDE | COMDE | CC4DE | CC3DE | CC2DE | CC1DE | UDE | BIE | TIE | COMIE | CC4IE | CC3IE | CC2IE | CC1IE | UIE |
| rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw |
Bit 15 Reserved, must be kept at reset value.
Bit 14 TDE : Trigger DMA request enable
- 0: Trigger DMA request disabled
- 1: Trigger DMA request enabled
Bit 13 COMDE : COM DMA request enable
- 0: COM DMA request disabled
- 1: COM DMA request enabled
Bit 12 CC4DE : Capture/Compare 4 DMA request enable
- 0: CC4 DMA request disabled
- 1: CC4 DMA request enabled
Bit 11 CC3DE : Capture/Compare 3 DMA request enable
- 0: CC3 DMA request disabled
- 1: CC3 DMA request enabled
Bit 10 CC2DE : Capture/Compare 2 DMA request enable
- 0: CC2 DMA request disabled
- 1: CC2 DMA request enabled
Bit 9 CC1DE : Capture/Compare 1 DMA request enable
- 0: CC1 DMA request disabled
- 1: CC1 DMA request enabled
Bit 8 UDE : Update DMA request enable
- 0: Update DMA request disabled
- 1: Update DMA request enabled
Bit 7 BIE : Break interrupt enable
- 0: Break interrupt disabled
- 1: Break interrupt enabled
Bit 6 TIE : Trigger interrupt enable
- 0: Trigger interrupt disabled
- 1: Trigger interrupt enabled
Bit 5 COMIE : COM interrupt enable
- 0: COM interrupt disabled
- 1: COM interrupt enabled
Bit 4 CC4IE : Capture/Compare 4 interrupt enable
- 0: CC4 interrupt disabled
- 1: CC4 interrupt enabled
Bit 3 CC3IE : Capture/Compare 3 interrupt enable
0: CC3 interrupt disabled
1: CC3 interrupt enabled
Bit 2 CC2IE : Capture/Compare 2 interrupt enable
0: CC2 interrupt disabled
1: CC2 interrupt enabled
Bit 1 CC1IE : Capture/Compare 1 interrupt enable
0: CC1 interrupt disabled
1: CC1 interrupt enabled
Bit 0 UIE : Update interrupt enable
0: Update interrupt disabled
1: Update interrupt enabled
17.4.5 TIM1 status register (TIM1_SR)
Address offset: 0x10
Reset value: 0x0000
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Res. | Res. | Res. | CC4OF | CC3OF | CC2OF | CC1OF | Res. | BIF | TIF | COMIF | CC4IF | CC3IF | CC2IF | CC1IF | UIF |
| rc_w0 | rc_w0 | rc_w0 | rc_w0 | rc_w0 | rc_w0 | rc_w0 | rc_w0 | rc_w0 | rc_w0 | rc_w0 | rc_w0 |
Bits 15:13 Reserved, must be kept at reset value.
Bit 12
CC4OF
: Capture/Compare 4 overcapture flag
refer to CC1OF description
Bit 11
CC3OF
: Capture/Compare 3 overcapture flag
refer to CC1OF description
Bit 10
CC2OF
: Capture/Compare 2 overcapture flag
refer to CC1OF description
Bit 9
CC1OF
: Capture/Compare 1 overcapture flag
This flag is set by hardware only when the corresponding channel is configured in input capture mode. It is cleared by software by writing it to '0'.
0: No overcapture has been detected.
1: The counter value has been captured in TIMx_CCR1 register while CC1IF flag was already set
Bit 8 Reserved, must be kept at reset value.
Bit 7
BIF
: Break interrupt flag
This flag is set by hardware as soon as the break input goes active. It can be cleared by software if the break input is not active.
0: No break event occurred.
1: An active level has been detected on the break input.
Bit 6
TIF
: Trigger interrupt flag
This flag is set by hardware on trigger event (active edge detected on TRGI input when the slave mode controller is enabled in all modes but gated mode. It is cleared by software.
0: No trigger event occurred.
1: Trigger interrupt pending.
Bit 5
COMIF
: COM interrupt flag
This flag is set by hardware on COM event (when Capture/compare Control bits - CCxE, CCxNE, OCxM - have been updated). It is cleared by software by writing it to '0'.
0: No COM event occurred.
1: COM interrupt pending.
Bit 4
CC4IF
: Capture/Compare 4 interrupt flag
refer to CC1IF description
Bit 3
CC3IF
: Capture/Compare 3 interrupt flag
refer to CC1IF description
Bit 2
CC2IF
: Capture/Compare 2 interrupt flag
refer to CC1IF description
Bit 1 CC1IF : Capture/Compare 1 interrupt flag
If channel CC1 is configured as output:
This flag is set by hardware when the counter matches the compare value, with some exception in center-aligned mode (refer to the CMS bits in the TIMx_CR1 register description). It is cleared by software.
- 0: No match.
- 1: The content of the counter TIMx_CNT matches the content of the TIMx_CCR1 register. When the contents of TIMx_CCR1 are greater than the contents of TIMx_ARR, the CC1IF bit goes high on the counter overflow (in upcounting and up/down-counting modes) or underflow (in downcounting mode)
If channel CC1 is configured as input:
This bit is set by hardware on a capture. It is cleared by software or by reading the TIMx_CCR1 register.
- 0: No input capture occurred
- 1: The counter value has been captured in TIMx_CCR1 register (An edge has been detected on IC1 which matches the selected polarity)
Bit 0 UIF : Update interrupt flag
This bit is set by hardware on an update event. It is cleared by software.
- 0: No update occurred.
- 1: Update interrupt pending. This bit is set by hardware when the registers are updated:
- – At overflow or underflow regarding the repetition counter value (update if repetition counter = 0) and if the UDIS=0 in the TIMx_CR1 register.
- – When CNT is reinitialized by software using the UG bit in TIMx_EGR register, if URS=0 and UDIS=0 in the TIMx_CR1 register.
- – When CNT is reinitialized by a trigger event (refer to Section 17.4.3: TIM1 slave mode control register (TIM1_SMCR) ), if URS=0 and UDIS=0 in the TIMx_CR1 register.
17.4.6 TIM1 event generation register (TIM1_EGR)
Address offset: 0x14
Reset value: 0x0000
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | BG | TG | COMG | CC4G | CC3G | CC2G | CC1G | UG |
| w | w | w | w | w | w | w | w |
Bits 15:8 Reserved, must be kept at reset value.
Bit 7 BG : Break generation
This bit is set by software in order to generate an event, it is automatically cleared by hardware.
0: No action
1: A break event is generated. MOE bit is cleared and BIF flag is set. Related interrupt or DMA transfer can occur if enabled.
Bit 6 TG : Trigger generation
This bit is set by software in order to generate an event, it is automatically cleared by hardware.
0: No action
1: The TIF flag is set in TIMx_SR register. Related interrupt or DMA transfer can occur if enabled.
Bit 5 COMG : Capture/Compare control update generation
This bit can be set by software, it is automatically cleared by hardware
0: No action
1: When CCPC bit is set, it allows to update CCxE, CCxNE and OCxM bits
Note: This bit acts only on channels having a complementary output.
Bit 4 CC4G : Capture/Compare 4 generation
Refer to CC1G description
Bit 3 CC3G : Capture/Compare 3 generation
Refer to CC1G description
Bit 2 CC2G : Capture/Compare 2 generation
Refer to CC1G description
Bit 1 CC1G : Capture/Compare 1 generation
This bit is set by software in order to generate an event, it is automatically cleared by hardware.
0: No action
1: A capture/compare event is generated on channel 1:
If channel CC1 is configured as output:
CC1IF flag is set, Corresponding interrupt or DMA request is sent if enabled.
If channel CC1 is configured as input:
The current value of the counter is captured in TIMx_CCR1 register. The CC1IF flag is set, the corresponding interrupt or DMA request is sent if enabled. The CC1OF flag is set if the CC1IF flag was already high.
Bit 0 UG : Update generation
This bit can be set by software, it is automatically cleared by hardware.
0: No action
1: Reinitialize the counter and generates an update of the registers. Note that the prescaler counter is cleared too (anyway the prescaler ratio is not affected). The counter is cleared if the center-aligned mode is selected or if DIR=0 (upcounting), else it takes the auto-reload value (TIMx_ARR) if DIR=1 (downcounting).
17.4.7 TIM1 capture/compare mode register 1 (TIM1_CCMR1)
Address offset: 0x18
Reset value: 0x0000
The channels can be used in input (capture mode) or in output (compare mode). The direction of a channel is defined by configuring the corresponding CCxS bits. All the other bits of this register have a different function in input and in output mode. For a given bit, OCxx describes its function when the channel is configured in output, ICxx describes its function when the channel is configured in input. So one must take care that the same bit can have a different meaning for the input stage and for the output stage.
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| OC2CE | OC2M[2:0] | OC2PE | OC2FE | CC2S[1:0] | OC1CE | OC1M[2:0] | OC1PE | OC1FE | CC1S[1:0] | ||||||
| IC2F[3:0] | IC2PSC[1:0] | IC1F[3:0] | IC1PSC[1:0] | ||||||||||||
| rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw |
Output compare mode
Bit 15 OC2CE : Output Compare 2 clear enable
Bits 14:12 OC2M[2:0] : Output Compare 2 mode
Bit 11 OC2PE : Output Compare 2 preload enable
Bit 10 OC2FE : Output Compare 2 fast enable
Bits 9:8 CC2S[1:0] : Capture/Compare 2 selection
This bit-field defines the direction of the channel (input/output) as well as the used input.
00: CC2 channel is configured as output
01: CC2 channel is configured as input, IC2 is mapped on TI2
10: CC2 channel is configured as input, IC2 is mapped on TI1
11: CC2 channel is configured as input, IC2 is mapped on TRC. This mode is working only if an internal trigger input is selected through the TS bit (TIMx_SMCR register)
Note: CC2S bits are writable only when the channel is OFF (CC2E = '0' in TIMx_CCER).
Bit 7 OC1CE : Output Compare 1 clear enable
OC1CE: Output Compare 1 Clear Enable
0: OC1Ref is not affected by the ETRF Input
1: OC1Ref is cleared as soon as a High level is detected on ETRF input
Bits 6:4 OC1M : Output Compare 1 modeThese bits define the behavior of the output reference signal OC1REF from which OC1 and OC1N are derived. OC1REF is active high whereas OC1 and OC1N active level depends on CC1P and CC1NP bits.
000: Frozen - The comparison between the output compare register TIMx_CCR1 and the counter TIMx_CNT has no effect on the outputs (this mode is used to generate a timing base).
001: Set channel 1 to active level on match. OC1REF signal is forced high when the counter TIMx_CNT matches the capture/compare register 1 (TIMx_CCR1).
010: Set channel 1 to inactive level on match. OC1REF signal is forced low when the counter TIMx_CNT matches the capture/compare register 1 (TIMx_CCR1).
011: Toggle - OC1REF toggles when TIMx_CNT=TIMx_CCR1.
100: Force inactive level - OC1REF is forced low.
101: Force active level - OC1REF is forced high.
110: PWM mode 1 - In upcounting, channel 1 is active as long as TIMx_CNT<TIMx_CCR1 else inactive. In downcounting, channel 1 is inactive (OC1REF='0') as long as TIMx_CNT>TIMx_CCR1 else active (OC1REF='1').
111: PWM mode 2 - In upcounting, channel 1 is inactive as long as TIMx_CNT<TIMx_CCR1 else active. In downcounting, channel 1 is active as long as TIMx_CNT>TIMx_CCR1 else inactive.
Note: 1: These bits can not be modified as long as LOCK level 3 has been programmed (LOCK bits in TIMx_BDTR register) and CC1S='00' (the channel is configured in output).
2: In PWM mode 1 or 2, the OCREF level changes only when the result of the comparison changes or when the output compare mode switches from "frozen" mode to "PWM" mode.
3: On channels having a complementary output, this bit field is preloaded. If the CCPC bit is set in the TIMx_CR2 register then the OC1M active bits take the new value from the preloaded bits only when a COM event is generated.
Bit 3 OC1PE : Output Compare 1 preload enable
0: Preload register on TIMx_CCR1 disabled. TIMx_CCR1 can be written at anytime, the new value is taken in account immediately.
1: Preload register on TIMx_CCR1 enabled. Read/Write operations access the preload register. TIMx_CCR1 preload value is loaded in the active register at each update event.
Note: These bits can not be modified as long as LOCK level 3 has been programmed (LOCK bits in TIMx_BDTR register) and CC1S='00' (the channel is configured in output).
Bit 2 OC1FE : Output Compare 1 fast enable
This bit is used to accelerate the effect of an event on the trigger in input on the CC output.
0: CC1 behaves normally depending on counter and CCR1 values even when the trigger is ON. The minimum delay to activate CC1 output when an edge occurs on the trigger input is 5 clock cycles.
1: An active edge on the trigger input acts like a compare match on CC1 output. Then, OC is set to the compare level independently from the result of the comparison. Delay to sample the trigger input and to activate CC1 output is reduced to 3 clock cycles. OCFE acts only if the channel is configured in PWM1 or PWM2 mode.
Bits 1:0 CC1S : Capture/Compare 1 selection
This bit-field defines the direction of the channel (input/output) as well as the used input.
00: CC1 channel is configured as output
01: CC1 channel is configured as input, IC1 is mapped on TI1
10: CC1 channel is configured as input, IC1 is mapped on TI2
11: CC1 channel is configured as input, IC1 is mapped on TRC. This mode is working only if an internal trigger input is selected through TS bit (TIMx_SMCR register)
Note: CC1S bits are writable only when the channel is OFF (CC1E = '0' in TIMx_CCER).
Input capture mode
Bits 15:12 IC2F : Input capture 2 filter
Bits 11:10 IC2PSC[1:0] : Input capture 2 prescaler
Bits 9:8 CC2S : Capture/Compare 2 selection
This bit-field defines the direction of the channel (input/output) as well as the used input.
00: CC2 channel is configured as output
01: CC2 channel is configured as input, IC2 is mapped on TI2
10: CC2 channel is configured as input, IC2 is mapped on TI1
11: CC2 channel is configured as input, IC2 is mapped on TRC. This mode is working only if an internal trigger input is selected through TS bit (TIMx_SMCR register)
Note: CC2S bits are writable only when the channel is OFF (CC2E = '0' in TIMx_CCER).
Bits 7:4 IC1F[3:0] : Input capture 1 filter
This bit-field defines the frequency used to sample TI1 input and the length of the digital filter applied to TI1. The digital filter is made of an event counter in which N consecutive events are needed to validate a transition on the output:
0000: No filter, sampling is done at
\(
f_{DTS}
\)
0001:
\(
f_{SAMPLING} = f_{CK\_INT}
\)
, N = 2
0010:
\(
f_{SAMPLING} = f_{CK\_INT}
\)
, N = 4
0011:
\(
f_{SAMPLING} = f_{CK\_INT}
\)
, N = 8
0100:
\(
f_{SAMPLING} = f_{DTS} / 2
\)
, N = 6
0101:
\(
f_{SAMPLING} = f_{DTS} / 2
\)
, N = 8
0110:
\(
f_{SAMPLING} = f_{DTS} / 4
\)
, N = 6
0111:
\(
f_{SAMPLING} = f_{DTS} / 4
\)
, N = 8
1000:
\(
f_{SAMPLING} = f_{DTS} / 8
\)
, N = 6
1001:
\(
f_{SAMPLING} = f_{DTS} / 8
\)
, N = 8
1010:
\(
f_{SAMPLING} = f_{DTS} / 16
\)
, N = 5
1011:
\(
f_{SAMPLING} = f_{DTS} / 16
\)
, N = 6
1100:
\(
f_{SAMPLING} = f_{DTS} / 16
\)
, N = 8
1101:
\(
f_{SAMPLING} = f_{DTS} / 32
\)
, N = 5
1110:
\(
f_{SAMPLING} = f_{DTS} / 32
\)
, N = 6
1111:
\(
f_{SAMPLING} = f_{DTS} / 32
\)
, N = 8
Note: Care must be taken that \( f_{DTS} \) is replaced in the formula by CK_INT when ICxF[3:0] = 1, 2 or 3.
Bits 3:2 IC1PSC : Input capture 1 prescaler
This bit-field defines the ratio of the prescaler acting on CC1 input (IC1).
The prescaler is reset as soon as CC1E='0' (TIMx_CCER register).
00: no prescaler, capture is done each time an edge is detected on the capture input
01: capture is done once every 2 events
10: capture is done once every 4 events
11: capture is done once every 8 events
Bits 1:0 CC1S : Capture/Compare 1 Selection
This bit-field defines the direction of the channel (input/output) as well as the used input.
00: CC1 channel is configured as output
01: CC1 channel is configured as input, IC1 is mapped on TI1
10: CC1 channel is configured as input, IC1 is mapped on TI2
11: CC1 channel is configured as input, IC1 is mapped on TRC. This mode is working only if an internal trigger input is selected through TS bit (TIMx_SMCR register)
Note: CC1S bits are writable only when the channel is OFF (CC1E = '0' in TIMx_CCER).
17.4.8 TIM1 capture/compare mode register 2 (TIM1_CCMR2)
Address offset: 0x1C
Reset value: 0x0000
Refer to the above CCMR1 register description.
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| OC4CE | OC4M[2:0] | OC4PE | OC4FE | CC4S[1:0] | OC3CE | OC3M[2:0] | OC3PE | OC3FE | CC3S[1:0] | ||||||
| IC4F[3:0] | IC4PSC[1:0] | CC4S[1:0] | IC3F[3:0] | IC3PSC[1:0] | CC3S[1:0] | ||||||||||
| rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw |
Output compare mode
Bit 15 OC4CE : Output compare 4 clear enable
Bits 14:12 OC4M : Output compare 4 mode
Bit 11 OC4PE : Output compare 4 preload enable
Bit 10 OC4FE : Output compare 4 fast enable
Bits 9:8 CC4S : Capture/Compare 4 selection
This bit-field defines the direction of the channel (input/output) as well as the used input.
00: CC4 channel is configured as output
01: CC4 channel is configured as input, IC4 is mapped on TI4
10: CC4 channel is configured as input, IC4 is mapped on TI3
11: CC4 channel is configured as input, IC4 is mapped on TRC. This mode is working only if an internal trigger input is selected through TS bit (TIMx_SMCR register)
Note: CC4S bits are writable only when the channel is OFF (CC4E = '0' in TIMx_CCER).
Bit 7 OC3CE : Output compare 3 clear enable
Bits 6:4 OC3M : Output compare 3 mode
Bit 3 OC3PE : Output compare 3 preload enable
Bit 2 OC3FE : Output compare 3 fast enable
Bits 1:0 CC3S : Capture/Compare 3 selection
This bit-field defines the direction of the channel (input/output) as well as the used input.
00: CC3 channel is configured as output
01: CC3 channel is configured as input, IC3 is mapped on TI3
10: CC3 channel is configured as input, IC3 is mapped on TI4
11: CC3 channel is configured as input, IC3 is mapped on TRC. This mode is working only if an internal trigger input is selected through TS bit (TIMx_SMCR register)
Note: CC3S bits are writable only when the channel is OFF (CC3E = '0' in TIMx_CCER).
Input capture mode
Bits 15:12 IC4F : Input capture 4 filter
Bits 11:10 IC4PSC : Input capture 4 prescaler
Bits 9:8 CC4S : Capture/Compare 4 selection
This bit-field defines the direction of the channel (input/output) as well as the used input.
00: CC4 channel is configured as output
01: CC4 channel is configured as input, IC4 is mapped on TI4
10: CC4 channel is configured as input, IC4 is mapped on TI3
11: CC4 channel is configured as input, IC4 is mapped on TRC. This mode is working only if an internal trigger input is selected through TS bit (TIMx_SMCR register)
Note: CC4S bits are writable only when the channel is OFF (CC4E = '0' in TIMx_CCER).
Bits 7:4 IC3F : Input capture 3 filter
Bits 3:2 IC3PSC : Input capture 3 prescaler
Bits 1:0 CC3S : Capture/compare 3 selection
This bit-field defines the direction of the channel (input/output) as well as the used input.
00: CC3 channel is configured as output
01: CC3 channel is configured as input, IC3 is mapped on TI3
10: CC3 channel is configured as input, IC3 is mapped on TI4
11: CC3 channel is configured as input, IC3 is mapped on TRC. This mode is working only if an internal trigger input is selected through TS bit (TIMx_SMCR register)
Note: CC3S bits are writable only when the channel is OFF (CC3E = '0' in TIMx_CCER).
17.4.9 TIM1 capture/compare enable register (TIM1_CCER)
Address offset: 0x20
Reset value: 0x0000
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Res | Res | CC4P | CC4E | CC3NP | CC3NE | CC3P | CC3E | CC2NP | CC2NE | CC2P | CC2E | CC1NP | CC1NE | CC1P | CC1E |
| rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw |
Bits 15:14 Reserved, must be kept at reset value.
Bit 13
CC4P
: Capture/Compare 4 output polarity
refer to CC1P description
Bit 12
CC4E
: Capture/Compare 4 output enable
refer to CC1E description
Bit 11
CC3NP
: Capture/Compare 3 complementary output polarity
refer to CC1NP description
Bit 10
CC3NE
: Capture/Compare 3 complementary output enable
refer to CC1NE description
Bit 9
CC3P
: Capture/Compare 3 output polarity
refer to CC1P description
Bit 8
CC3E
: Capture/Compare 3 output enable
refer to CC1E description
Bit 7
CC2NP
: Capture/Compare 2 complementary output polarity
refer to CC1NP description
Bit 6
CC2NE
: Capture/Compare 2 complementary output enable
refer to CC1NE description
Bit 5
CC2P
: Capture/Compare 2 output polarity
refer to CC1P description
Bit 4
CC2E
: Capture/Compare 2 output enable
refer to CC1E description
Bit 3 CC1NP : Capture/Compare 1 complementary output polarity
CC1 channel configuration as output:
- 0: OC1N active high.
- 1: OC1N active low.
CC1 channel configuration as input:
This bit is used in conjunction with CC1P to define the polarity of TI1FP1 and TI2FP1. Refer to CC1P description.
Note: On channels having a complementary output, this bit is preloaded. If the CCPC bit is set in the TIMx_CR2 register then the CC1NP active bit takes the new value from the preloaded bits only when a Commutation event is generated.
Note: This bit is not writable as soon as LOCK level 2 or 3 has been programmed (LOCK bits in TIMx_BDTR register) and CC1S="00" (the channel is configured in output).
Bit 2 CC1NE : Capture/Compare 1 complementary output enable
- 0: Off - OC1N is not active. OC1N level is then function of MOE, OSSI, OSSR, OIS1, OIS1N and CC1E bits.
- 1: On - OC1N signal is output on the corresponding output pin depending on MOE, OSSI, OSSR, OIS1, OIS1N and CC1E bits.
Note: On channels having a complementary output, this bit is preloaded. If the CCPC bit is set in the TIMx_CR2 register then the CC1NE active bit takes the new value from the preloaded bits only when a Commutation event is generated.
Bit 1 CC1P : Capture/Compare 1 output polarity
CC1 channel configured as output:
- 0: OC1 active high
- 1: OC1 active low
CC1 channel configured as input:
CC1NP/CC1P bits select the active polarity of TI1FP1 and TI2FP1 for trigger or capture operations.
- 00: non-inverted/rising edge
The circuit is sensitive to TIxFP1 rising edge (capture or trigger operations in reset, external clock or trigger mode), TIxFP1 is not inverted (trigger operation in gated mode or encoder mode).
- 01: inverted/falling edge
The circuit is sensitive to TIxFP1 falling edge (capture or trigger operations in reset, external clock or trigger mode), TIxFP1 is inverted (trigger operation in gated mode or encoder mode).
- 10: reserved, do not use this configuration.
- 11: non-inverted/both edges
The circuit is sensitive to both TIxFP1 rising and falling edges (capture or trigger operations in reset, external clock or trigger mode), TIxFP1 is not inverted (trigger operation in gated mode). This configuration must not be used in encoder mode.
Note: On channels having a complementary output, this bit is preloaded. If the CCPC bit is set in the TIMx_CR2 register then the CC1P active bit takes the new value from the preloaded bits only when a Commutation event is generated.
Note: This bit is not writable as soon as LOCK level 2 or 3 has been programmed (LOCK bits in TIMx_BDTR register).
Bit 0 CC1E : Capture/Compare 1 output enable
CC1 channel configured as output:
0: Off - OC1 is not active. OC1 level is then function of MOE, OSSI, OSSR, OIS1, OIS1N and CC1NE bits.
1: On - OC1 signal is output on the corresponding output pin depending on MOE, OSSI, OSSR, OIS1, OIS1N and CC1NE bits.
CC1 channel configured as input:
This bit determines if a capture of the counter value can actually be done into the input capture/compare register 1 (TIMx_CCR1) or not.
0: Capture disabled.
1: Capture enabled.
Note: On channels having a complementary output, this bit is preloaded. If the CCPC bit is set in the TIMx_CR2 register then the CC1E active bit takes the new value from the preloaded bits only when a Commutation event is generated.
Table 63. Output control bits for complementary OCx and OCxN channels with break feature
| Control bits | Output states (1) | |||||
|---|---|---|---|---|---|---|
| MOE bit | OSSI bit | OSSR bit | CCxE bit | CCxNE bit | OCx output state | OCxN output state |
| 1 | X | 0 | 0 | 0 | Output Disabled (not driven by the timer) OCx=0, OCx_EN=0 | Output Disabled (not driven by the timer) OCxN=0, OCxN_EN=0 |
| 0 | 0 | 1 | Output Disabled (not driven by the timer) OCx=0, OCx_EN=0 | OCxREF + Polarity OCxN=OCxREF xor CCxNP, OCxN_EN=1 | ||
| 0 | 1 | 0 | OCxREF + Polarity OCx=OCxREF xor CCxP, OCx_EN=1 | Output Disabled (not driven by the timer) OCxN=0, OCxN_EN=0 | ||
| 0 | 1 | 1 | OCREF + Polarity + dead-time OCx_EN=1 | Complementary to OCREF (not OCREF) + Polarity + dead-time OCxN_EN=1 | ||
| 1 | 0 | 0 | Output Disabled (not driven by the timer) OCx=CCxP, OCx_EN=0 | Output Disabled (not driven by the timer) OCxN=CCxNP, OCxN_EN=0 | ||
| 1 | 0 | 1 | Off-State (output enabled with inactive state) OCx=CCxP, OCx_EN=1 | OCxREF + Polarity OCxN=OCxREF xor CCxNP, OCxN_EN=1 | ||
| 1 | 1 | 0 | OCxREF + Polarity OCx=OCxREF xor CCxP, OCx_EN=1 | Off-State (output enabled with inactive state) OCxN=CCxNP, OCxN_EN=1 | ||
| 1 | 1 | 1 | OCREF + Polarity + dead-time OCx_EN=1 | Complementary to OCREF (not OCREF) + Polarity + dead-time OCxN_EN=1 | ||
Table 63. Output control bits for complementary OCx and OCxN channels with break feature (continued)
| Control bits | Output states (1) | |||||
|---|---|---|---|---|---|---|
| MOE bit | OSSI bit | OSSR bit | CCxE bit | CCxNE bit | OCx output state | OCxN output state |
| 0 | 0 | X | 0 | 0 | Output Disabled (not driven by the timer) OCx=CCxP, OCx_EN=0 | Output Disabled (not driven by the timer) OCxN=CCxNP, OCxN_EN=0 |
| 0 | 1 | Output Disabled (not driven by the timer) Asynchronously: OCx=CCxP, OCx_EN=0, OCxN=CCxNP, OCxN_EN=0 Then if the clock is present: OCx=OISx and OCxN=OISxN after a dead-time, assuming that OISx and OISxN do not correspond to OCx and OCxN both in active state. | ||||
| 1 | 0 | |||||
| 1 | 1 | |||||
| 1 | 0 | 0 | Output Disabled (not driven by the timer) OCx=CCxP, OCx_EN=0 | Output Disabled (not driven by the timer) OCxN=CCxNP, OCxN_EN=0 | ||
| 0 | 1 | Off-State (output enabled with inactive state) Asynchronously: OCx=CCxP, OCx_EN=1, OCxN=CCxNP, OCxN_EN=1 Then if the clock is present: OCx=OISx and OCxN=OISxN after a dead-time, assuming that OISx and OISxN do not correspond to OCx and OCxN both in active state. | ||||
| 1 | 0 | |||||
| 1 | 1 | |||||
1. When both outputs of a channel are not used (CCxE = CCxNE = 0), the OISx, OISxN, CCxP and CCxNP bits must be kept cleared.
Note: The state of the external I/O pins connected to the complementary OCx and OCxN channels depends on the OCx and OCxN channel state and the GPIO registers.
17.4.10 TIM1 counter (TIM1_CNT)
Address offset: 0x24
Reset value: 0x0000
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| CNT[15:0] | |||||||||||||||
| rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw |
Bits 15:0 CNT[15:0] : Counter value
17.4.11 TIM1 prescaler (TIM1_PSC)
Address offset: 0x28
Reset value: 0x0000

| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| PSC[15:0] | |||||||||||||||
| rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw |
Bits 15:0 PSC[15:0] : Prescaler value
The counter clock frequency (CK_CNT) is equal to \( f_{CK\_PSC} / (PSC[15:0] + 1) \) .
PSC contains the value to be loaded in the active prescaler register at each update event (including when the counter is cleared through UG bit of TIMx_EGR register or through trigger controller when configured in “reset mode”).
17.4.12 TIM1 auto-reload register (TIM1_ARR)
Address offset: 0x2C
Reset value: 0xFFFF

| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| ARR[15:0] | |||||||||||||||
| rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw |
Bits 15:0 ARR[15:0] : Auto-reload value
ARR is the value to be loaded in the actual auto-reload register.
Refer to the Section 17.3.1: Time-base unit on page 330 for more details about ARR update and behavior.
The counter is blocked while the auto-reload value is null.
17.4.13 TIM1 repetition counter register (TIM1_RCR)
Address offset: 0x30
Reset value: 0x0000

| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | REP[7:0] | |||||||
| rw | rw | rw | rw | rw | rw | rw | rw | ||||||||
Bits 15:8 Reserved, must be kept at reset value.
Bits 7:0 REP[7:0] : Repetition counter value
These bits allow the user to set-up the update rate of the compare registers (i.e. periodic transfers from preload to active registers) when preload registers are enable, as well as the update interrupt generation rate, if this interrupt is enable.
Each time the REP_CNT related downcounter reaches zero, an update event is generated and it restarts counting from REP value. As REP_CNT is reloaded with REP value only at the repetition update event U_RC, any write to the TIMx_RCR register is not taken in account until the next repetition update event.
It means in PWM mode (REP+1) corresponds to:
- – the number of PWM periods in edge-aligned mode
- – the number of half PWM period in center-aligned mode.
17.4.14 TIM1 capture/compare register 1 (TIM1_CCR1)
Address offset: 0x34
Reset value: 0x0000
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| CCR1[15:0] | |||||||||||||||
| rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw |
Bits 15:0 CCR1[15:0] : Capture/Compare 1 value
If channel CC1 is configured as output:
CCR1 is the value to be loaded in the actual capture/compare 1 register (preload value).
It is loaded permanently if the preload feature is not selected in the TIMx_CCMR1 register (bit OC1PE). Else the preload value is copied in the active capture/compare 1 register when an update event occurs.
The active capture/compare register contains the value to be compared to the counter TIMx_CNT and signaled on OC1 output.
If channel CC1 is configured as input:
CCR1 is the counter value transferred by the last input capture 1 event (IC1).
17.4.15 TIM1 capture/compare register 2 (TIM1_CCR2)
Address offset: 0x38
Reset value: 0x0000
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| CCR2[15:0] | |||||||||||||||
| rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw |
Bits 15:0 CCR2[15:0] : Capture/Compare 2 value
If channel CC2 is configured as output:
CCR2 is the value to be loaded in the actual capture/compare 2 register (preload value).
It is loaded permanently if the preload feature is not selected in the TIMx_CCMR2 register (bit OC2PE). Else the preload value is copied in the active capture/compare 2 register when an update event occurs.
The active capture/compare register contains the value to be compared to the counter TIMx_CNT and signalled on OC2 output.
If channel CC2 is configured as input:
CCR2 is the counter value transferred by the last input capture 2 event (IC2).
17.4.16 TIM1 capture/compare register 3 (TIM1_CCR3)
Address offset: 0x3C
Reset value: 0x0000

| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| CCR3[15:0] | |||||||||||||||
| rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw |
Bits 15:0 CCR3[15:0] : Capture/Compare value
If channel CC3 is configured as output:
CCR3 is the value to be loaded in the actual capture/compare 3 register (preload value).
It is loaded permanently if the preload feature is not selected in the TIMx_CCMR3 register (bit OC3PE). Else the preload value is copied in the active capture/compare 3 register when an update event occurs.
The active capture/compare register contains the value to be compared to the counter TIMx_CNT and signalled on OC3 output.
If channel CC3 is configured as input:
CCR3 is the counter value transferred by the last input capture 3 event (IC3).
17.4.17 TIM1 capture/compare register 4 (TIM1_CCR4)
Address offset: 0x40
Reset value: 0x0000
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| CCR4[15:0] | |||||||||||||||
| rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw |
Bits 15:0 CCR4[15:0] : Capture/Compare value
If channel CC4 is configured as output:
CCR4 is the value to be loaded in the actual capture/compare 4 register (preload value).
It is loaded permanently if the preload feature is not selected in the TIMx_CCMR4 register (bit OC4PE). Else the preload value is copied in the active capture/compare 4 register when an update event occurs.
The active capture/compare register contains the value to be compared to the counter
TIMx_CNT and signalled on OC4 output.
If channel CC4 is configured as input:
CCR4 is the counter value transferred by the last input capture 4 event (IC4).
17.4.18 TIM1 break and dead-time register (TIM1_BDTR)
Address offset: 0x44
Reset value: 0x0000
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| MOE | AOE | BKP | BKE | OSSR | OSSI | LOCK[1:0] | DTG[7:0] | ||||||||
| rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw |
Note: As the bits AOE, BKP, BKE, OSSI, OSSR and DTG[7:0] can be write-locked depending on the LOCK configuration, it can be necessary to configure all of them during the first write access to the TIMx_BDTR register.
Bit 15 MOE : Main output enable
This bit is cleared asynchronously by hardware as soon as the break input is active. It is set by software or automatically depending on the AOE bit. It is acting only on the channels which are configured in output.
0: OC and OCN outputs are disabled or forced to idle state.
1: OC and OCN outputs are enabled if their respective enable bits are set (CCxE, CCxNE in TIMx_CCER register).
See OC/OCN enable description for more details ( Section 17.4.9: TIM1 capture/compare enable register (TIM1_CCER) on page 391 ).
Bit 14 AOE : Automatic output enable
0: MOE can be set only by software
1: MOE can be set by software or automatically at the next update event (if the break input is not active)
Note: This bit cannot be modified as long as LOCK level 1 has been programmed (LOCK bits in TIMx_BDTR register).
Bit 13 BKP : Break polarity- 0: Break input BRK is active low
- 1: Break input BRK is active high
Note: This bit can not be modified as long as LOCK level 1 has been programmed (LOCK bits in TIMx_BDTR register).
Note: Any write operation to this bit takes a delay of 1 APB clock cycle to become effective.
Bit 12 BKE : Break enable- 0: Break inputs (BRK and CCS clock failure event) disabled
- 1: Break inputs (BRK and CCS clock failure event) enabled
Note: This bit cannot be modified when LOCK level 1 has been programmed (LOCK bits in TIMx_BDTR register).
Note: Any write operation to this bit takes a delay of 1 APB clock cycle to become effective.
Bit 11 OSSR : Off-state selection for Run modeThis bit is used when MOE=1 on channels having a complementary output which are configured as outputs. OSSR is not implemented if no complementary output is implemented in the timer.
See OC/OCN enable description for more details ( Section 17.4.9: TIM1 capture/compare enable register (TIM1_CCER) on page 391 ).
- 0: When inactive, OC/OCN outputs are disabled (OC/OCN enable output signal=0).
- 1: When inactive, OC/OCN outputs are enabled with their inactive level as soon as CCxE=1 or CCxNE=1. Then, OC/OCN enable output signal=1
Note: This bit can not be modified as soon as the LOCK level 2 has been programmed (LOCK bits in TIMx_BDTR register).
Bit 10 OSSI : Off-state selection for Idle modeThis bit is used when MOE=0 on channels configured as outputs.
See OC/OCN enable description for more details ( Section 17.4.9: TIM1 capture/compare enable register (TIM1_CCER) on page 391 ).
- 0: When inactive, OC/OCN outputs are disabled (OC/OCN enable output signal=0).
- 1: When inactive, OC/OCN outputs are forced first with their idle level as soon as CCxE=1 or CCxNE=1. OC/OCN enable output signal=1
Note: This bit can not be modified as soon as the LOCK level 2 has been programmed (LOCK bits in TIMx_BDTR register).
Bits 9:8 LOCK[1:0] : Lock configurationThese bits offer a write protection against software errors.
- 00: LOCK OFF - No bit is write protected.
- 01: LOCK Level 1 = DTG bits in TIMx_BDTR register, OISx and OISxN bits in TIMx_CR2 register and BKE/BKP/AOE bits in TIMx_BDTR register can no longer be written.
- 10: LOCK Level 2 = LOCK Level 1 + CC Polarity bits (CCxP/CCxNP bits in TIMx_CCER register, as long as the related channel is configured in output through the CCxS bits) as well as OSSR and OSSI bits can no longer be written.
- 11: LOCK Level 3 = LOCK Level 2 + CC Control bits (OCxM and OCxPE bits in TIMx_CCMRx registers, as long as the related channel is configured in output through the CCxS bits) can no longer be written.
Note: The LOCK bits can be written only once after the reset. Once the TIMx_BDTR register has been written, their content is frozen until the next reset.
Bits 7:0 DTG[7:0] : Dead-time generator setup
This bit-field defines the duration of the dead-time inserted between the complementary outputs. DT correspond to this duration.
DTG[7:5]=0xx => DT=DTG[7:0]x
\(
t_{dtg}
\)
with
\(
t_{dtg}=t_{DTS}
\)
.
DTG[7:5]=10x => DT=(64+DTG[5:0])x
\(
t_{dtg}
\)
with
\(
T_{dtg}=2xt_{DTS}
\)
.
DTG[7:5]=110 => DT=(32+DTG[4:0])x
\(
t_{dtg}
\)
with
\(
T_{dtg}=8xt_{DTS}
\)
.
DTG[7:5]=111 => DT=(32+DTG[4:0])x
\(
t_{dtg}
\)
with
\(
T_{dtg}=16xt_{DTS}
\)
.
Example if
\(
T_{DTS}=125
\)
ns (8 MHz), dead-time possible values are:
0 to 15875 ns by 125 ns steps,
16 us to 31750 ns by 250 ns steps,
32 us to 63 us by 1 us steps,
64 us to 126 us by 2 us steps
Note: This bit-field can not be modified as long as LOCK level 1, 2 or 3 has been programmed (LOCK bits in TIMx_BDTR register).
17.4.19 TIM1 DMA control register (TIM1_DCR)
Address offset: 0x48
Reset value: 0x0000
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Res. | Res. | Res. | DBL[4:0] | Res. | Res. | Res. | DBA[4:0] | ||||||||
| rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | ||||||
Bits 15:13 Reserved, must be kept at reset value.
Bits 12:8 DBL[4:0] : DMA burst length
This 5-bit vector defines the number of DMA transfers (the timer recognizes a burst transfer when a read or a write access is done to the TIMx_DMAR address)
00000: 1 transfer
00001: 2 transfers
00010: 3 transfers
...
10001: 18 transfers
Bits 7:5 Reserved, must be kept at reset value.
Bits 4:0 DBA[4:0] : DMA base address
This 5-bit vector defines the base-address for DMA transfers (when read/write access are done through the TIMx_DMAR address). DBA is defined as an offset starting from the address of the TIMx_CR1 register.
Example:
00000: TIMx_CR1,
00001: TIMx_CR2,
00010: TIMx_SMCR,
...
Example: Let us consider the following transfer: DBL = 7 transfers and DBA = TIMx_CR1. In this case the transfer is done to/from 7 registers starting from the TIMx_CR1 address.
17.4.20 TIM1 DMA address for full transfer (TIM1_DMAR)
Address offset: 0x4C
Reset value: 0x0000

| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| DMAB[15:0] | |||||||||||||||
| rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw | rw |
Bits 15:0 DMAB[15:0] : DMA register for burst accesses
A read or write operation to the DMAR register accesses the register located at the address
\(
(\text{TIMx\_CR1 address}) + (\text{DBA} + \text{DMA index}) \times 4
\)
where TIMx_CR1 address is the address of the control register 1, DBA is the DMA base address configured in TIMx_DCR register, DMA index is automatically controlled by the DMA transfer, and ranges from 0 to DBL (DBL configured in TIMx_DCR).
Example of how to use the DMA burst feature
In this example the timer DMA burst feature is used to update the contents of the CCRx registers ( \( x = 2, 3, 4 \) ) with the DMA transferring half words into the CCRx registers.
This is done in the following steps:
- Configure the corresponding DMA channel as follows:
- – DMA channel peripheral address is the DMAR register address
- – DMA channel memory address is the address of the buffer in the RAM containing the data to be transferred by DMA into CCRx registers.
- – Number of data to transfer = 3 (See note below).
- – Circular mode disabled.
- Configure the DCR register by configuring the DBA and DBL bit fields as follows:
DBL = 3 transfers, DBA = 0xE. - Enable the TIMx update DMA request (set the UDE bit in the DIER register).
- Enable TIMx
- Enable the DMA channel
Note: This example is for the case where every CCRx register to be updated once. If every CCRx register is to be updated twice for example, the number of data to transfer should be 6. Let's take the example of a buffer in the RAM containing data1, data2, data3, data4, data5 and data6. The data is transferred to the CCRx registers as follows: on the first update DMA request, data1 is transferred to CCR2, data2 is transferred to CCR3, data3 is transferred to CCR4 and on the second update DMA request, data4 is transferred to CCR2, data5 is transferred to CCR3 and data6 is transferred to CCR4.
17.4.21 TIM1 register map
TIM1 registers are mapped as 16-bit addressable registers as described in the table below:
Table 64. TIM1 register map and reset values
| Offset | Register | 31 | 30 | 29 | 28 | 27 | 26 | 25 | 24 | 23 | 22 | 21 | 20 | 19 | 18 | 17 | 16 | 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0x00 | TIM1_CR1 | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | CKD [1:0] | ARPE | CMS [1:0] | DIR | OPM | URS | UDIS | CEN | ||
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||||||||||||||||||||||||
| 0x04 | TIM1_CR2 | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | OIS4 | OIS3N | OIS3 | OIS2N | OIS2 | OIS1N | OIS1 | T1IS | MMS[2:0] | CCDS | CCUS | Res. | CCPC | ||
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||||||||||||||||||||
| 0x08 | TIM1_SMCR | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | ETP | ECE | ETPS [1:0] | ETF[3:0] | MSM | TS[2:0] | OCSS | SMS[2:0] | ||||||||
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||||||||||||||||||
| 0x0C | TIM1_DIER | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | TDE | COMDE | CC4DE | CC3DE | CC2DE | CC1DE | UDE | BIE | TIE | COMIE | CC4IE | CC3IE | CC2IE | CC1IE | UIE |
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |||||||||||||||||||
| 0x10 | TIM1_SR | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | CC4OF | CC3OF | CC2OF | CC1OF | Res. | BIF | TIF | COMIF | CC4IF | CC3IF | CC2IF | CC1IF | UIF | |
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||||||||||||||||||||
| 0x14 | TIM1_EGR | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | BG | TG | COM | CC4G | CC3G | CC2G | CC1G | UG | |
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |||||||||||||||||||||||||
| 0x18 | TIM1_CCMR1 Output compare mode | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | OC2CE | OC2M [2:0] | OC2PE | OC2FE | CC2S [1:0] | OC1CE | OC1M [2:0] | OC1PE | OC1FE | CC1S [1:0] | ||||||
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |||||||||||||||||||
| TIM1_CCMR1 Input capture mode | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | IC2F[3:0] | IC2PSC [1:0] | CC2S [1:0] | IC1F[3:0] | IC1PSC [1:0] | CC1S [1:0] | |||||||||||
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |||||||||||||||||||
| 0x1C | TIM1_CCMR2 Output compare mode | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | OC4CE | OC4M [2:0] | OC4PE | OC4FE | CC4S [1:0] | OC3CE | OC3M [2:0] | OC3PE | OC3FE | CC3S [1:0] | ||||||
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |||||||||||||||||||
| TIM1_CCMR2 Input capture mode | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | IC4F[3:0] | IC4PSC [1:0] | CC4S [1:0] | IC3F[3:0] | IC3PSC [1:0] | CC3S [1:0] | |||||||||||
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |||||||||||||||||||
| 0x20 | TIM1_CCER | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | CC4P | CC4E | CC3NP | CC3NE | CC3P | CC3E | CC2NP | CC2NE | CC2P | CC2E | CC1NP | CC1NE | CC1P | CC1E | |
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |||||||||||||||||||
| 0x24 | TIM1_CNT | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | CNT[15:0] | |||||||||||||||
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||||||||||||||||||
| 0x28 | TIM1_PSC | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | PSC[15:0] | |||||||||||||||
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||||||||||||||||||
| 0x2C | TIM1_ARR | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | ARR[15:0] | |||||||||||||||
| Reset value | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | ||||||||||||||||||
| 0x30 | TIM1_RCR | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | REP[7:0] | |||||||
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |||||||||||||||||||||||||
Table 64. TIM1 register map and reset values (continued)
| Offset | Register | 31 | 30 | 29 | 28 | 27 | 26 | 25 | 24 | 23 | 22 | 21 | 20 | 19 | 18 | 17 | 16 | 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0x34 | TIM1_CCR1 | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | CCR1[15:0] | |||||||||||||||
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |||||||||||||||||
| 0x38 | TIM1_CCR2 | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | CCR2[15:0] | |||||||||||||||
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |||||||||||||||||
| 0x3C | TIM1_CCR3 | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | CCR3[15:0] | |||||||||||||||
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |||||||||||||||||
| 0x40 | TIM1_CCR4 | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | CCR4[15:0] | |||||||||||||||
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||||||||||||||||||
| 0x44 | TIM1_BDTR | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | MOE | AOE | BKP | BKE | OSSR | OSSI | LOCK [1:0] | DT[7:0] | ||||||||
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||||||||||||||||||
| 0x48 | TIM1_DCR | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | DBL[4:0] | Res. | Res. | Res. | DBA[4:0] | ||||||||
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||||||||||||||||||||||||
| 0x4C | TIM1_DMAR | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | Res. | DMAB[15:0] | |||||||||||||||
| Reset value | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||||||||||||||||||
Refer to Section 2.2 on page 46 for the register boundary addresses.